
Fターム[5H004GB16]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 物流工程、製造工程 (321) | ロボット(マニピュレータ) (133)
Fターム[5H004GB16]に分類される特許
81 - 100 / 133
システムの最適制御方法
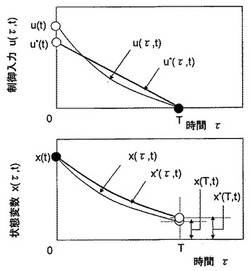
【課題】予見不可能な時変目標値に追従する有限評価区間の非線形最適制御問題の制御則を導くことが課題である.
【解決手段】Receding Horizon制御を用いた非線形最適制御問題の近似解法を開発し,非線形システムの実時間制御に適用できる一般的手法を導いた.
具体例としてRR車の旋回限界域におけるDYCの目標横すべり角追従制御に適用した結果、一般的な比例制御に比べ追従性(応答性と収束性とも)が大幅に向上できることを確認した.また旋回限界域においてもニュートラルステア特性を実現できることを明らかにした.
(もっと読む)
情報処理装置、情報処理方法、およびプログラム

【課題】時系列データをより正確に生成することができるようにする。
【解決手段】下位時系列生成器61のRNN71−1乃至71−Nは、センサモータ信号を学習し、その学習した結果に応じて予測したセンサモータ信号を生成する。上位時系列予測生成器62が、RNN71−1乃至71−Nが生成時に発生させる予測誤差の推定値である推定予測誤差errorPredH[N]を出力し、この推定予測誤差errorPredH[N]が、ゲート72−1乃至72−Nの開閉状態を制御するゲート信号gate[N]に変換される。合成回路73は、開閉状態が制御されたゲート72−1乃至72−Nから出力されるRNN71−1乃至71−Nの出力信号sm1(t+1)乃至smN(t+1)の総和を、時刻t+1のセンサモータ信号sm(t+1)として出力する。本発明は、例えば、ロボットなどに組み込まれる情報処理装置に適用できる。
(もっと読む)
ロボット制御装置
【課題】 コンベア等の搬送装置におけるロボットの作業対象物の移動量の変化が大きくても高速高精度な追従作業を実行可能なロボット制御装置を得る。
【解決手段】 ロボット制御装置において、搬送装置位置検出部と、搬送装置位置生成部と、搬送装置位置生成部で得られたロボットの指令値を生成する搬送装置移動量生成部と、ロボットの搬送装置に対する追従誤差を記憶しておく追従誤差記憶部と、ロボットの追従遅れを補正する追従遅れ補正量を求め、追従遅れ補正量と追従誤差記憶部に記憶された追従誤差より追従目標移動量を生成する追従遅れ補正部と、追従遅れ補正部で生成された追従目標移動量から次制御周期の追従移動量を生成する追従移動量生成部とを備えるようにした。
(もっと読む)
モータ制御装置
【課題】 動作が制限される機械系のイナーシャを同定するモータ制御装置を提供する。
【解決手段】 動作に制限条件がある機械を駆動するモータのモータ制御装置であって、速度指令とモ−タ速度によりトルク指令を生成する速度制御部(21)と、前記トルク指令からモータを駆動するモータ駆動部(22)とを備えるモータ制御装置において、イナーシャを同定するイナーシャ同定部(24)と、前記制限条件に基づいて同定指令を生成する同定指令部(25)とを備えた。
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
倒立移動装置及びその制御方法
【課題】車体の倒立状態を維持したまま、より高い段差を乗り越えることができる倒立移動装置を提供する。
【解決手段】倒立移動装置10は、路面の段差を検出する路面センサ29と、車体20の傾斜角速度θ’を検出するジャイロセンサ28と、車輪12、14の回転角速度を検出するエンコーダ22a、24aと、各センサにより検出された検出値に応じて、コントローラ70がモータ22、24に制御指令値を出力することにより、車体20を倒立状態に維持しながら路面上を走行する。コントローラ70は、路面センサ29により進行方向に段差が検出された場合は、段差を乗り越えるときに車体20を進行方向に対して後ろ側に傾斜させる。
(もっと読む)
位相反応曲線学習方法及び装置、周期的運動制御方法及び装置、並びに歩行運動制御装置
【課題】歩行運動のような周期運度の安定化に有効な位相反応曲線を更新させる位相反応曲線学習方法などを提供する。
【解決手段】本発明に係る位相反応曲線学習装置1においては、同期事象検出部12にて、制御器3と2足歩行ロボット5との間で同期を確立すべき事象(同期事象という)が発生したか否かを検出する。同期事象検出部12にて同期事象の発生が検出された場合、成否判定部13は同期事象の成否を判定する。報酬設定部14は、成否判定部13による判定結果に基づいて各事象の達成度としての報酬を設定し、曲線パラメータ更新部15は、報酬設定部14にて設定された各事象の報酬の累計値が最大になるように曲線パラメータ11aを更新する。制御器3は、位相反応曲線学習装置1によって最適化された位相反応曲線に基づいて位相のリセットを行なうことによって制御器3と2足歩行ロボット5との間で同期を確立させる。
(もっと読む)
自己組織化マップを用いる装置、その方法及びプログラム
【課題】数少ないトレーニングケースから汎化性の高い制御を実現することができる装置を提供する。
【解決手段】装置内に複数存するニューラルネットワークのモジュールからなるユニットのうち、最も次時刻の制御対象の予測状態を正しく予測した予測器を含むユニットに係る制御器の制御信号を採用して制御対象を制御するので、即時性の高い制御を実現することができると共に、自己組織化マップを形成することができる。
(もっと読む)
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
(もっと読む)
ロボットの制御装置
【課題】柔軟制御時のロボットアームの動作制限を安全に行うことを解決課題とする。
【解決手段】位置及び速度の状態フィードバックループを有し、各関節を駆動するモータの制御回路と、位置制御ゲインまたは速度制御ゲインを通常ゲインより小さく設定する手段とを備えたロボットの制御装置において、位置制御ゲインまたは速度制御ゲインを通常ゲインより小さく設定する手段と、前記モータの動作制限値を設定または演算により導出する手段と、前記動作制限値をサーボ系の指令値とする前記制御回路とは別の第2のフィードバック制御手段と、第2のフィードバック制御の程度を決定する調節係数設定手段と、前記調節係数を乗じた第2のフィードバック制御系の出力値を、第1のフィードバック速度制御系のトルク制御部分または速度制御部分に加算する手段を有するものである。
(もっと読む)
加速度センサを用いた制御装置及び調整装置
【課題】被駆動体の加速度に関する情報を用いて、駆動体の制御ゲイン又は時定数を適切かつ定量的に設定可能な制御装置、及び制御ゲイン又は時定数を調整する機能を備えた調整装置を提供する。
【解決手段】制御装置10は、第1加速度センサ6による被駆動体3の加速度検出値を用いて、速度指令作成部14及び電流指令作成部16の制御ゲインを補正する制御ゲイン補正部18を有する。
(もっと読む)
状態推定方法、状態推定装置、状態推定システム及びコンピュータプログラム
【課題】線形のダイナミクスだけでなく、非線形のダイナミクスへも容易に適用することが可能な状態推定方法、状態推定装置、状態推定システム及びコンピュータプログラムを提供する。
【解決手段】強化学習による状態推定を行う(強化学習)状態推定装置3は、観測対象1の状態を模する模擬モデル3a、模擬モデル3aによる観測対象1の状態の推定結果等に基づき状態推定の方策を示すフィードバック値を算出する強化学習モジュール3b、強化学習モジュール3bが算出したフィードバック値及び観測対象1の観測結果等に基づき報酬値を算出する報酬関数3d等のプログラムモジュール及び関数を用い、強化学習モジュール3bでは、フィードバック値が適正な値になる様に報酬値に基づく強化学習を行う。
(もっと読む)
マルチエージェント型制御装置およびマルチエージェント型制御プログラム
【課題】進化的手法によるマルチエージェントを用いた学習により制御則を最適化することが可能なマルチエージェント型制御装置を提供する。
【解決手段】マルチエージェント型制御装置では、リスト構造に従って、エージェントを順次選択しつつ(S106)、所定期間ずつ、選択されたエージェントに対応する制御演算要素を使用して、制御信号を算出させ(S108)、算出された制御信号により被制御対象を駆動し(S110)、駆動後に観測された制御対象量に応じて選択されたエージェントの評価値の更新を行う(S112)。さらに、更新された評価値に基づいて、エージェントの分裂および消滅処理が行なわれる(S114,S116)。
(もっと読む)
機械の移動可能な機械要素の移動案内のための方法および装置
本発明は次の方法ステップを有する機械の移動可能な機械要素(18)の移動案内のための方法に関する。a)機械要素(18)の所望の移動経過を表す案内目標量(xsoll)が予め与えられるステップ、b)モデル(2)に基づいて案内目標量(xsoll)からフィードフォワード制御実際量(Mvor)および/または案内実際量(xist)が求められ、モデル(2)が移動に関与する要素(16,18)の動特性を模擬する部分モデル(3)を有する。更に、本発明は方法に対応する装置に関する。本発明は機械の移動可能な機械要素(18)の最適な移動案内を可能にする。  (もっと読む)
(もっと読む)
位置制御装置、位置制御方法及び位置制御プログラム
【目的】物体の位置を、物体を保持する移動機構によって目標位置に速やかに追従させる技術を提供する。
【構成】本発明は、物体の位置を検出する位置検出器と、物体を保持しており物体に加える力の指令値が入力され入力された指令値を実現するように動力によって動作する移動機構と、物体に加える力の指令値を移動機構へ出力する指令装置を備える。指令装置内に構築された制御ロジックは、スライディングモード制御ロジックに対してs/(L+K・s+B・s2)の局所的なフィードバックループを付加したものである。この局所的なフィードバックループにより、物体の位置を目標位置に追従させる際にオーバーシュートを生じさせることなく、さらに指令装置が出力する指令値がチャタリングすることを防止できる。
(もっと読む)
モータおよびコントローラの反転:位置制御ロボットに対するトルク指令
【課題】 通信遅延、測定ノイズおよびロボットシステム固有のコントローラパラメータの不確かさが存在する場合に、モータと関節コントローラのダイナミクスをキャンセルするシステムと方法を提供する。
【解決手段】 (もっと読む)
(もっと読む)
機械定数同定装置を備えたモータ制御装置
【課題】非線形摩擦や雑音などの影響を抑制し、微小動作のみで負荷の連結したモータ105の粘性摩擦を同定するとともに、粘性摩擦同定値を用いて高精度な制御をすることができる機械定数同定装置を備えたモータ制御装置を提供する。
【解決手段】粘性摩擦同定器108として、位置を入力し位置振幅を出力する振幅演算器109と、前記位置振幅を入力し粘性摩擦同定値を算出し出力する粘性摩擦演算器110とを備える。
(もっと読む)
ハイブリッド制御デバイス
ロボット用ハイブリッド制御システムは、ニューロン制御部分と非ニューロン制御部分とを含むことができる。 (もっと読む)
強化学習の価値関数表現方法およびこれを用いた装置
【課題】強化学習法は自律移動ロボット等に応用される知的動作の一つであり、未知の環境での動作が可能であるなど優れた面を持つシステムであるが、不完全知覚問題という基礎的な課題を持っている。いろいろな解決策が提案されているが、決め手はなく、システムも複雑なものになり兼ねない。簡単で効果的な解決方法が望まれている。
【解決手段】状態行動価値を複素数で定義する複素価値関数を導入する。時系列情報は複素数値の位相部分に取り込むことにする。これにより、複雑なアルゴリズムを用いることなく時系列情報が価値関数に取り込まれ、簡便な実装により不完全知覚問題が有効に解決される。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】 計算量を減少させて、実タスクへ適用可能な自然方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】 制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果によりTD誤差を求め、TD誤差近似器を更新して、方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
81 - 100 / 133
[ Back to top ]