
Fターム[5H004HA09]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 加速度、角加速度、又はその高次微分 (18)
Fターム[5H004HA09]に分類される特許
1 - 18 / 18
アクチュエータの制御方法及びアクチュエータの制御装置
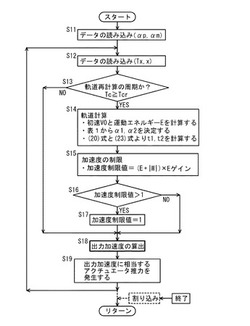
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
規範応答演算装置およびそれを用いた車両用制駆動力制御装置

【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
センサ情報の統合方法と装置
【課題】誤差と計算量を増大させずに複数のセンサ情報を統合することができる方法と装置を提供する。
【解決手段】新たに受信したセンサ情報Ynを、観測時刻の順に記録し、各センサ情報に対し、第1条件を満たすか否かを判定する(S3)。第1条件は、「そのセンサ情報の観測時刻と同じかそれよりも新しいセンサ情報がすべてのセンサから受信されていること」である。第1条件を満たす場合に、第1条件を満たす各センサ情報6を観測時刻順に用いて、内部状態を予測し、第1推定値X1を予測した内部状態に更新して記憶し、第2推定値X2を更新した第1推定値X1で上書きし、更新に用いたセンサ情報を削除する(S4,S5,S7,S8)。第1条件を満たさない場合に、新たに受信したセンサ情報Ynを用いて、内部状態を予測し、第2推定値X2を予測した内部状態に更新して記憶する(S9)第2推定値X2を対象物の内部状態として出力する(S10)。
(もっと読む)
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
電動機制御装置
【課題】実操業時に速度パターンや負荷等が変動する場合にも、制御パラメータを常に最適値に調整可能として安定した制御応答が得られるような電動機制御装置を提供する。
【解決手段】電動機の状態量に関する加減速パターン等の指令パターンを出力する自動運転指令生成部4と、前記状態量をフィードバックして前記指令パターンに追従させるように制御する位置・速度調節部5と、前記状態量に基づいて調節部5における制御パラメータを変更する制御パラメータ操作部33と、を備え、電動機により負荷機械を駆動しながらパラメータ操作部33により制御パラメータを最適値に調整する電動機制御装置において、負荷機械の状態に応じて前記指令パターンを変化させる。
(もっと読む)
PID制御装置及びPID制御方法
【課題】高速応答が求められる制御システムにおいて、PIDパラメータを自動設定する。
【解決手段】PID制御部11をP制御状態とし、目標値入力を一定とした状態で、オートチューニング部12はPID制御部11の比例ゲインKpを徐々に増大させる。Kpの増大に伴い、偏差に振動が発生する。FFT解析部13は偏差を周波数解析して振動の周波数を検出する。フィルタ14は偏差から振動周波数の成分を抽出しRMS処理部15に出力する。RMS処理部15は偏差の振動の1周期ごとに実効値を算出し、複数周期連続して増加していることを検出したときに、オートチューニング部12にトリガー信号を送出し、PID制御部11のKpの値を下げる。オートチューニング部12はトリガー信号を受信すると、そのときの比例ゲインKpc及び固有振動の周期TcからPIDパラメータを決定する。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
制御対象の制御入力決定手段
【課題】制御対象に入力する制御入力を生成する複数の制御関数の重みを自動的に決定する制御入力決定手段を提供する。
【解決手段】重みが設定された複数の制御関数を有する制御式を用い入力される車両4の制御入力決定手段2であり、価値決定手段6が有する価値部分空間情報に基づいて要求指令に対応する状態の価値と重みの関係データを求め、方針決定手段8で関係データから制御目的を達成する最適化重みを選択し、最適化手段10でその最適化重みを制御式に適用して制御入力を生成し、その制御入力により車両4を制御する。次に、状態抽出手段12でその制御後の車両4の状態を抽出する。価値更新手段14で車両4の制御前の状態と制御後の状態との変化に基づいて、価値部分空間情報の価値を更新する。さらに、評価手段16で制御後の状態と制御目的の目標値との差を求め、その差に基づいて価値更新手段14の価値の更新を補正する制御入力決定手段2。
(もっと読む)
運動指令生成装置
【課題】複雑な動作条件を満足する運動指令値をリアルタイムで計算できる指令値生成装置を得るものである。
【解決手段】制御対象の動作条件が入力される入力部と、時間の関数である基本関数と前記基本関数毎に未知の重み係数を乗じて足し合わせた重み付き線形和によって運動指令値を表した線形和情報を作成し、前記動作条件に応じて前記重み係数を含む最適化変数に対する線形の等式及び不等式によって制約条件及び評価指標を表した線形計画問題を作成して線形計画問題情報として記憶する線形計画問題設定部と、前記線形計画問題情報が表す前記線形計画問題を解くことによって、前記重み係数を求める重み係数算出部と、前記線形和情報に基づき前記基本関数に前記重み係数算出部で求めた重み係数を乗じて足し合わせた重み付き線形和によって前記運動指令値を算出する指令値算出部とを備えた。
(もっと読む)
モータモーション用シミュレータ
【課題】プログラマブルコントローラに対して実モータを制御するための制御パラメータを容易に設定可能とする。
【解決手段】実モータ7に模擬して当該実モータに対応した性能等を有するシミュレート用モータの画素部品17a,17b,17c,…を格納するモータライブラリ画面15aと、シミュレート用のモータ制御パターンをポインティングデバイス操作でグラフィック表示画像に作成できるシミュレート用GUI画面15bと、を有したコンピュータからなり、モータライブラリ画面からシミュレート用モータを選択しかつポインティングデバイスでシミュレート用GUI画面上のモータ制御パターンに沿う操作を行うことで、そのモータ制御パターンに対応する実モータの上記モータ制御パラメータを提供することができるようになっている
(もっと読む)
運動制御システム
運動制御システム(10)は、オペレータ入力部材(20)を有するオペレータインターフェース(13)と、オペレータ入力部材に駆動連結される制御可能な力フィードバック装置(18)とを含む。運動制御システムはまた、第2の操作パラメータの目標値(TARv)と第2の操作パラメータの実際値(ACTv)との間の制御誤差(Ec)に少なくとも部分的に関係するように第1の操作パラメータを調整することを含めて、1つ以上の可動構成要素(12)の運動を調整する制御部(14)を含むことが可能である。第2の運転パラメータの目標値は、オペレータ入力部材の運動に少なくとも部分的に基づくことが可能である。制御部はまた、制御誤差に少なくとも部分的に関係するように、および制御誤差に対するフィードバック力の導関数が少なくとも部分的に制御誤差に応じて変化するように、制御可能な力フィードバック装置を操作してフィードバック力をオペレータ入力部材に提供することが可能である。  (もっと読む)
(もっと読む)
モーション習得システムおよびその制御方法
【課題】未知の実環境との安定した接触動作を確立すると共に、人間の指のようなモーションを個々に抽出,保存,再現できるようにする。
【解決手段】ロバスト性を保ちつつ制御剛性をゼロにする加速度制御を、外乱オブザーバにより各ロボットシステムのアクチュエータ1に行なう。アクチュエータ1の外乱加速度θ・・extと加速度応答θ・・resとを、モード加速度変換手段27,28によりモードクオリー行列を用いて直交座標系の非干渉モードにおける加速度外乱m・・extや加速度応答値m・・resに変換する。そして、これらの加速度外乱m・・extや加速度応答値m・・resを基に、非干渉モードの各々に対応した対象物47に対するモーションを抽出する。
(もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
機械の移動可能な機械要素の移動案内のための方法および装置
本発明は次の方法ステップを有する機械の移動可能な機械要素(18)の移動案内のための方法に関する。a)機械要素(18)の所望の移動経過を表す案内目標量(xsoll)が予め与えられるステップ、b)モデル(2)に基づいて案内目標量(xsoll)からフィードフォワード制御実際量(Mvor)および/または案内実際量(xist)が求められ、モデル(2)が移動に関与する要素(16,18)の動特性を模擬する部分モデル(3)を有する。更に、本発明は方法に対応する装置に関する。本発明は機械の移動可能な機械要素(18)の最適な移動案内を可能にする。  (もっと読む)
(もっと読む)
システム同定装置およびそのシステム同定方法
【課題】可動範囲の限定された負荷の付いた電動機の慣性モーメントと粘性摩擦を同定できるシステム同定装置およびそのシステム同定方法を提供する。
【解決手段】速度指令発生器201、速度制御器202、トルク制御器203、電動機204、位置検出器205、微分器206、慣性モーメント粘性摩擦同定器207を備え、慣性モーメント粘性摩擦同定器207は、トルク指令を入力しトルク指令振幅を出力するトルク指令振幅演算器101と、位置を入力し位置振幅を出力する位置振幅演算器102と、前記トルク指令振幅と前記位置振幅を入力し慣性モーメント粘性摩擦同定値を算出し出力する第1慣性モーメント粘性摩擦演算器103を備える。
(もっと読む)
システム同定装置
【課題】微小動作で電動機の粘性摩擦とクーロン摩擦を同定できるシステム同定装置を提供する。
【解決手段】速度指令発生器201、速度制御器202、トルク制御器203、電動機204、位置検出器205、微分器206、第1摩擦同定器位置207を備え、第1摩擦同定器位置207は、位置を入力しその入力信号振幅である位置振幅を出力する振幅演算器101と、速度指令と速度を入力し、入力エネルギを出力する第1入力エネルギ演算器102と、前記位置振幅と前記入力エネルギを入力し電動機204の粘性摩擦とクーロン摩擦である摩擦同定値を算出し出力する粘性摩擦クーロン摩擦演算器103を備える。
(もっと読む)
能動型防振装置
【課題】低コスト化を図りつつ確実に加振器17の不動作異常を検出することができる能動型防振装置1を提供する。
【解決手段】能動型防振装置1は、車両特定部位の振動を能動的に抑制させるように適応制御法により少なくともフィルタ係数ゲインaを更新して、フィルタ係数ゲインaを用いた周期性制御信号yを生成する適応制御部15を備える。さらに、適応制御部15を非制御状態から制御状態へ切り替えた場合に、適応制御部15により更新されるフィルタ係数ゲインaの変化率に基づき、加振器17の不動作異常を判定する異常判定部193を備える。そして、フィルタ係数ゲインaの変化率が連続的に小さくなっている場合には、加振器17は正常と判断し、連続的に小さくなっていない場合には、加振器17は不動作異常と判定する。
(もっと読む)
サーボ機構制御系のための適応コマンドフィルタリング
本発明の好適な実施例は、コマンドトラジェクトリの間および/またはその後のサーボ誤差を減少させるために、コマンドトラジェクトリ、サーボ機構制御系(10)のアーキテクチャまたはその両方を修正するための方法を実施する。反復微調整手順は、サーボ機構制御系で使用するために補正入力duを生成し、この補正入力は、サーボ機構制御系出力の要求された値(yd)と、その現実値(y)との間の誤差(e)を著しく減少する。一実施例では、独特に識別されたプラントモデルは、微調整手順の性能および信頼性を改善する近似傾斜を計算するために、反復微調整手順で使用される。他の実施例では、実際のプラント応答が反復微調整手順の特定モデルに代えて使用される。これは、補正入力信号duを更新するために、それをプラント(12)に適用する前に、トレーニング運転から蓄えられた誤差信号を時間反転することによって成し遂げられる。 (もっと読む)
1 - 18 / 18
[ Back to top ]