
Fターム[5H004LA11]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 数式で表されているもの (208)
Fターム[5H004LA11]の下位に属するFターム
微分、差分、状態方程式で表されているもの (124)
Fターム[5H004LA11]に分類される特許
61 - 80 / 84
制御方法および制御装置
【課題】過渡状態における相対量の制御性と整定状態における制御の安定性とを両立させる。
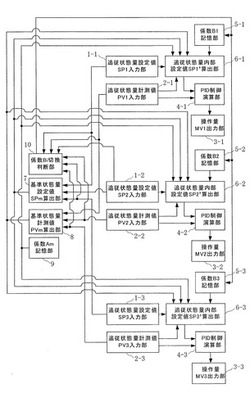
【解決手段】特定の状態量を基準状態量とし、基準状態量との相対量が規定値を維持するよう制御される状態量を追従状態量とする。算出部6−1〜6−3は、内部入力値を基準状態量に対する第1の要素と相対量に対する第2の要素との和とし、基準状態量に対する制御演算用入力値の要素を第1の要素とし、相対量に対する制御演算用入力値の要素に係数Biを掛けた値を第2の要素として、追従状態量設定値を内部入力値に変換する。係数Bi切換判断部10は、追従状態量計測値PViが追従状態量設定値SPiから遠いときは係数Biとして第1の値を選択し、設定値SPiから近いときは、計測値PViの基準状態量計測値PVmへの追従性の度合が第1の値よりも弱い第2の値を選択する。
(もっと読む)
非線形ダイナミクスを有する制御対象のためのモデル化装置、非線形ダイナミクスを有する制御対象のための制御装置、非線形ダイナミクスを有する車両のための制御装置及び非線形ダイナミクスを有する制御対象のためのモデル化プログラム。

【課題】非線形ダイナミクスを有する制御対象についてモデル化を容易にし、求められたモデルを用いて非線形ダイナミクスを有する制御対象の制御を可能とすることである。
【解決手段】車両制御システム30は、大別して2つの機能及び構成に分けて考えることができる。その1つは、モデル化コンピュータ40によって実現されるもので、車両10の制御特性を模擬した模擬車両20から、制御に関するパラメータを多数収集し、それを用いて、非線形状態変数xと線形入力変数uについて
の形式で車両10のモデル化を行う。その2は、車両制御コンピュータ70によって実現されるもので、モデル化コンピュータ40によって得られた車両10のモデルを用い、実際の車両10について、姿勢制御が行われる。
(もっと読む)
多入力多出力系の制御装置
【課題】多入力多出力系のモデルを高い精度で構築するとともに、計算負荷を抑えることで、内燃機関などのプラントを最適に制御すること。
【解決手段】 実機を非線形モデルで近似した精密モデル10を作成する精密モデル作成手段と、精密モデル10へ入力される複数の入力値U1(t),U2(t),・・・,Uj(t)の制約条件を設定する入力制約条件設定手段と、実機を線形モデルで近似した簡易線形モデル11を作成する線形モデル作成手段と、簡易線形モデル11を用いて、目標出力に対する最適入力を算出する最適入力算出手段と、最適入力に基づいて、制約条件を絞り込む制約条件限定手段と、絞り込まれた制約条件に基づいて、実現し得る複数の入力値U1(t),U2(t),・・・,Uj(t)の全ての組み合わせを精密モデル10へ入力する入力手段と、入力値U1(t),U2(t),・・・,Uj(t)に対応して精密モデル10から出力された複数の出力値Y1(t),Y2(t),・・・,Yk(t)を評価する評価手段と、を備える。
(もっと読む)
モデル生成方法、状態予測方法、状態調整方法、モデル生成装置、状態予測装置、及び状態調整システム
【課題】 高炉を用いた銑鉄の生産等の断続的に原料を投入して生産物を取り出す生産プロセスについて、生産プロセスの状態を予測するためのモデル式を簡便に生成することができるモデル生成方法、状態予測方法、状態調整方法、モデル生成装置、状態予測装置、及び状態調整システムを提供する。
【解決手段】 状態予測装置1は、生産プロセスでの各種の生産条件を示す条件データ及び生産プロセスの状態を示す状態データを蓄積しておき、ある時点で得られた状態データとその時点以前の所定期間内で得られた複数種類の条件データとの対応関係を解析して、条件データから状態データを予測するモデル式を生成する。状態予測装置1は、生成したモデル式を用いて未来の状態データを予測できる。生産条件が変動した場合でも、モデル式に基づいて他の生産条件を適宜制御することにより、生産プロセスの状態を良好に調整することができる。
(もっと読む)
多慣性共振系の振動抑制制御方法及び装置
【課題】多慣性共振系の全ての共振モードを安定化する。
【解決手段】1次の共振モードに対しては、2慣性共振系の振動抑制に有効な共振比制御を適用し、それより高次の振動モードに対しては、位相進み補償を用いて、全ての共振極を安定化する。一方、軸ねじれ反力が無視できる剛性の高い負荷に対しては、外乱オブザーバのみを用いて位相進み補償を行うことで、全ての共振極を安定化する。
(もっと読む)
石油精製プラントのパラメータ予測装置及びパラメータ予測方法
【課題】予測時間及びモデル作成に用いる第一及び第二パラメータについて最適化された予測モデルを構築し、この予測モデルを用いて精度良く石油精製プラントの特定のパラメータを予測する。
【解決手段】入力手段と、測定手段と、パラメータ記憶手段と、モデル作成条件に基づいて測定された第一及び第二パラメータの少なくとも一部にPLS(Partial Least Squares)解析を行い、予測時間並びにモデル作成に用いる第一及び第二パラメータに関して最適化された予測モデルを作成するモデル作成手段と、モデル記憶手段と、出力手段とを有することを特徴とする予測装置。
(もっと読む)
MPCモデルによるオンライン・ダイナミックアドバイザ
プロセスの同定試験を使用して開発された、モデル予測制御要素からPID制御要素のダイナミクスを除去するための方法が開示されている。そして、これにより、リアルタイムのデータにアクセスして、代替的な制御可能性のシナリオを調べる能力とともにプロセスの将来の状態の予測を継続するようにプロセスとともに作動する、オンラインのオペレータ・アドバイザに基づく非常に迅速な最終制御要素の生成が可能となる。 (もっと読む)
操縦システム
【課題】既存の制御システムの制御特性は変更せずに実機において操縦者の所望の操縦特性を容易に実現する操縦システムを提供する。
【解決手段】制御対象である実機システム11にフィードバック制御器12を組み込んだ拡大実機システム10の入力として、拡大実機システム10のH∞ノルム定義型右逆システムであるフィードフォワード制御器20を結合し、そのフィードフォワード制御器20の入力に対し操縦者の所望の操縦特性を模擬したオーダモデル30を結合したフライト操縦システム100を構築する。なお、フィードバック制御器12およびフィードフォワード制御器20はデジタル変換され計算機内部に先に実装され、オーダモデル30はデジタル変換され計算機内部または外部に後から実装される。
(もっと読む)
学習制御装置、学習制御方法、およびプログラム
【課題】自律学習エージェントの強化学習に要する時間を短縮する。
【解決手段】 本発明を適用した制御器では、成功実行シーケンスが得られずに失敗実行シーケンスが得られた場合にも、失敗実行シーケンスの結果を用いて学習する。具体的には、図12に示すように、失敗実行シーケンスの結果として到達してしまった状態を「真の目標値Sd」とは別に「仮目標値S’d」として、当初から仮目標値S’dへの状態遷移を計画していたと仮定し、失敗実行シーケンスから得た時刻tの状態St、仮目標値S’d、行動at+1(t=1,2,…,T)を教師として、at+1=g(St,Sd)の関数gを教師ありで学習する。本発明は、自律学習エージェントに適用できる。
(もっと読む)
サーボ制御装置
【課題】 各軸の振動特性に差がある場合でも、軌跡制御精度の劣化を招くことなく、制御対象の振動を抑制することができるようにする。
【解決手段】 位置指令に含まれている所定の周波数成分を減衰させる振動抑制フィルタ1と、所定の周波数領域において振動抑制フィルタ1の応答特性と一致する応答特性を有し、第2の軸の位置指令を入力する応答特性補正フィルタ4とを設け、第1の軸の位置検出信号が振動抑制フィルタ1から出力された振動抑制フィルタ信号に追従するように第1の軸を駆動し、第2の軸の位置検出信号が応答特性補正フィルタ4から出力された補正フィルタ信号に追従するように第2の軸を駆動する。
(もっと読む)
共線性を検出し、検証し、かつ修復するための方法と物品
【課題】
共線的なモデルを検出し、検証し、修復する系統的方法を提供する。
【解決手段】
モデル又はサブセットの共線性を検出後、当該共線性が非共線的であるかどうかを検証する方向性試験を行なう。次にモデルは、モデル不確定領域あるいは他の線形制約の条件下で、準共線的な状態から、完全に共線的か又はより非共線的か、いずれかの方向に調整される。このモデル調整に際して、原モデルとの偏差は最小化され、モデルの方向性は変わらない。 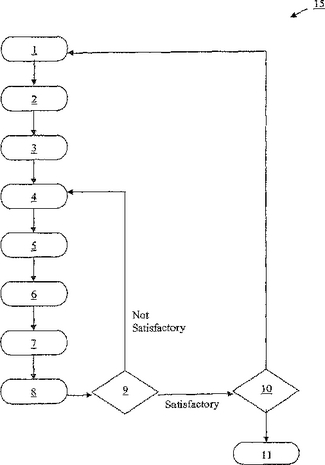 (もっと読む)
(もっと読む)
制御対象モデル生成装置および生成方法
【課題】操作量の時系列データの収集と専門的知識をユーザに要求しない制御対象モデル生成装置を実現する。
【解決手段】制御対象モデル生成装置は、制御対象の数式モデルを記憶するモデル記憶部1と、コントローラアルゴリズムを記憶するコントローラ記憶部2と、制御系モデルのシミュレーションを実行するシミュレーション演算部5と、実際の制御結果である実制御量を記憶する実制御量記憶部6と、実制御量とシミュレーションによって算出されたモデル制御量の近さを示す評価関数値を演算する評価関数演算部7と、制御対象モデルパラメータを逐次変更しながらシミュレーションを実行させ、評価関数値が最適値となる制御対象モデルパラメータを求める制御対象モデルパラメータ探索演算部8とを備える。
(もっと読む)
モデル駆動制御装置およびモデル駆動制御方法
【課題】 良好な制御性能を維持して、最適操作量を算出するための処理時間を短縮するモデル駆動制御方法を提供する。
【解決手段】 最適最終操作量決定部21では、制御対象30に最終的に与える操作量を、なまし関数を切り離した制御対象モデル15を用いて決定する。次いで、最適今回操作量決定部13で、決定された最適最終操作量に基づいて、なまし関数をもつ制御対象モデル15を用いて今回制御対象30に与える最適操作量を決定する。
(もっと読む)
学習制御装置、学習制御方法、およびプログラム
【課題】自律学習エージェントにおいて、制御器のモジュール化・階層化の設計を自動化する。
【解決手段】 ステップS1で予測器学習部は、学習により関数からなる予測器に相当する微分方程式を取得する。ステップS2で変数グループ生成部は、取得された微分方程式に基づき、変数をグループ化する。ステップS3で行動変数決定部は、各変数グループにそれぞれ対応する行動変数を決定する。ステップS4で状態変数決定部は、各変数グループにそれぞれ対応する状態変数を決定して、行動変数とともに階層化部に出力する。ステップS5で階層化部は、変数グループと行動変数の組み合わせに対応する制御器を生成し、生成した制御器を階層化する。本発明は、自律エージェントに適用できる。
(もっと読む)
電動機制御装置およびその機械特性測定方法並びに制御器調整方法
【課題】機械特性を測定して制御器の安定度を把握し、機械特性に合わせて制御器を最適に調整可能な電動機制御装置および機械特性測定方法、制御器調整方法を提供する。
【解決手段】 電動機1または機械5の動作量を検出する検出手段2と、指令信号を発生する指令器4と、指令信号を受けて電動機1を駆動するための制御器3と、電流制御部6と、を備えた電動機制御装置において、外乱入力する指令を生成する外乱信号発生部7と、制御器3が出力する駆動力を検出する駆動力検出手段8と、閉ループ外乱周波数応答特性を算出する閉ループ外乱周波数応答特性算出手段10と、該外乱信号発生部7の出力と駆動力検出手段8の出力から閉ループ駆動力周波数応答特性を算出する閉ループ駆動力周波数応答特性算出手段11と、該閉ループ駆動力周波数応答特性と該閉ループ外乱周波数応答特性から、機械特性を算出する機械特性算出手段13と、を備えている。
(もっと読む)
パラメータ変化に対応するエネルギーシステム運用計画の修正方法および装置およびプログラム
【課題】 予測値に基づき一旦作成されたエネルギーシステムの運用計画を、予測値と実測値とのずれが明らかとなった場合に、迅速に且つ運用計画策定時の目標を損なうことなく修正する。
【解決手段】 入力パラメータの一部または全部の変化に対応して電力・温熱供給手段2および冷熱供給手段3の一部または全部の構成機器の出力量を調整する修正案を予め用意すると共に、修正案について入力パラメータの変化量と調整対象となる機器の出力調整量との関係式を予め求めておき、予測したパラメータ値から真のパラメータ値への実際の入力パラメータの変化量が明らかとなった場合に、関係式に当該実際の入力パラメータの変化量を代入して調整対象機器の出力調整量を求めて、運用計画における電力・温熱供給手段2および冷熱供給手段3の一部または全部の構成機器の出力量を修正する。
(もっと読む)
制御装置および制御方法
【課題】 制御仕様や条件が変動する制御対象に対してモデルベースの制御を行
う場合に、モデルの精度が悪いと制御結果が悪くなる問題を解決し、制御精度を
向上させることにある。
【解決手段】 所望の制御量に対応した第1の制御指令150に対して、これを
適切に補正するための補正量算出手段120を設け、補正量算出手段120は第
1の誤差(制御誤差)152と第2の誤差(モデル誤差)を分離して算出し、そ
れぞれに対応した第1の補正量156と第2の補正量157をそれぞれ第1のゲ
イン155と第2のゲイン154を介して計算し、第1と第2の補正量を加算し
た補正量157’によって第1の制御指令を補正して第2の制御指令151を求
め、この第2の制御指令と制御モデル140を用いて操作量算出手段130によ
って操作量153を算出し、制御対象170を制御する。
(もっと読む)
サーボ制御装置および方法
【課題】 時間や温度ともに変化する摩擦力をより正確に求め、時間や温度の変化に依存することなく常に位置制御や柔軟制御の制御性能を高く維持することができるようにする。
【解決手段】 実制御と同一構成のシミュレーション位置制御器15およびシミュレーション速度制御器16と、制御対象を模擬したメカモデル演算部18と、実制御とシミュレーションを比較する比較部19と、比較部19の出力から摩擦モデルを生成する摩擦モデル生成部20と、摩擦モデル生成部20の出力に基づいた摩擦補償値を補償する補償部21とを備える。
(もっと読む)
制御対象モデル生成装置および生成方法
【課題】時系列データの収集に要する時間と労力を削減し、制御やモデリングに関する専門的知識を不要とする。
【解決手段】制御対象モデル生成装置は、制御対象の数式モデルを記憶するモデル記憶部1と、コントローラアルゴリズムを記憶するコントローラ記憶部2と、制御系のシミュレーションを実行するシミュレーション演算部5と、実際の制御対象の制御結果から求められた実制御特徴量を記憶する実制御特徴量記憶部7と、モデル制御特徴量をシミュレーションの結果から算出するモデル制御特徴量演算部8と、実制御特徴量とモデル制御特徴量との近さを示す評価関数値を演算する評価関数演算部9と、制御対象モデルパラメータを逐次変更しながらシミュレーションを実行させ、評価関数値が最適値となる制御対象モデルパラメータを求める制御対象モデルパラメータ探索演算部10とを備える。
(もっと読む)
閉ループ制御システムにおける周波数制御
プロセス制御装置、方法およびシステムは、閉ループ制御システムのフィードバック信号内で周期的外乱の影響を考慮する周波数制御を提供する。各々の大きさおよび位相を含むフィードバック信号の周波数成分を判定する。各周波数成分のほぼ逆位相およびほぼ同じ大きさを有する各周波数成分に対する波形を生成する。次に、波形を合計して、制御下システムに供給される制御システム出力から周期的外乱の影響を相殺するように制御システムの出力内で合計される補償波形を生成する。  (もっと読む)
(もっと読む)
61 - 80 / 84
[ Back to top ]