
Fターム[5H004LA12]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 数式で表されているもの (208) | 微分、差分、状態方程式で表されているもの (124)
Fターム[5H004LA12]に分類される特許
101 - 120 / 124
システムの最適制御方法

【課題】エネルギ回生機能を有するシステムのエネルギ回生効果は、評価関数が2次形式でなくなるため、従来の最適制御理論を用いて最適制御則を求めることができなかった.またエネルギ回生評価項と性能評価項からなる評価関数を最小化するという認識がなかったため、制御則の導出は試行錯誤的に行われており、改善が望まれていた.
【解決手段】システムの方程式の一般解を部分積分し,その残余項をテイラー展開して1次近似する方法を用いて制御則を求め,これとReceding Horizon制御を組み合わせる方法を,エネルギ回生機能付きシステムの最適制御に適用し、従来の状態量フィードバック制御より優れた効果が得られることを明らかにした.
(もっと読む)
力覚コントローラ装置及びその制御方法

【課題】 操作をパワーアシストするとともに、手触り感など微妙な感覚を操作者に効率的に伝達することができるようにする。
【解決手段】 本発明の力覚コントローラ装置1は、制御対象15に対する操作を入力するための操作端2を含む操作機構3と、該操作端2に加えられたトルクを検出する操作力検出部5と、操作端2の現在位置を検出する現在位置検出部6と、制御対象15に加わる外力を入力する外力入力部8と、操作端2を駆動する駆動部9と、前記操作力に応じて操作端2に対する操作をアシストするとともに、外力Dに応じて操作端2に力覚を提示するように、前記操作力及び前記外力を任意の比率で合成した力に基づいて操作端2の目標位置を算出し、該目標位置及び前記現在位置に基づいて操作端2を該目標位置に追従させるように駆動部9を制御する力覚制御部10とを備えている。
(もっと読む)
予測制御装置、予測制御方法、予測制御プログラム及び記憶媒体
【課題】 様々な特性モデルに対応して制御器の開発を容易にし、制御中に制御器の特性モデル誤差解消のため予測制御量を変更したり、系の安定化のための参照軌道等の積分要素を制御器に挿入したりすることなく、希望目標値応答特性と、外乱応答特性とを同時に実現する。
【解決手段】 外乱を含む制御対象(4)の制御量を検出する制御量検出手段(検出器14)と、前記制御対象の特性モデルを用いて予測制御量を計算する予測制御量演算手段(予測制御量演算部8)と、予測制御量と検出された制御量との予測誤差を求める予測誤差演算手段(予測誤差演算部10)と、制御すべき時点から予測時間後までの仮の操作量に対する制御量を予測し、前記予測誤差を最小にするように最適化計算して操作量を決定する最適操作量演算手段(最適操作量演算部6)とを含む構成である。
(もっと読む)
二段階外乱応答手法を用いた脚式ロボットの制御システムおよび制御方法
【課題】 脚式ロボットが予期せぬ力を受けたときに自身のバランスを維持できるようなシステムと方法を提供する。
【解決手段】 反射段階では、ロボットは力に従うことで即座にこの力の影響に対処する。1つの実施形態では、反射段階中に、制御システムは、力の不安定な影響を相殺するのに必要な大きさで、ロボットの角運動量の負の変化量を発生させるような動きをロボットが実行するように指令を決定する。回復段階では、ロボットは、反射段階で運動を行った後に自身の姿勢を回復する。1つの実施形態では、ロボットは、ロボットの位置エネルギーを最大化する静的な安定した直立姿勢に戻る。1つの実施形態では、回復段階中に、制御システムは、ロボットが自身の位置エネルギーを増加させる動きを実行するように指令を決定する。
(もっと読む)
制御装置
【課題】制御対象の出力の未来値を精度よく推定することができ、ひいては、その推定値を用いる制御対象の出力の制御を良好に行うことができる制御装置を提供する。
【解決手段】例えば排気系Eを制御対象とする制御ユニット7は、排気系Eの出力を検出するO2センサ6の出力等を用いて排気系Eのモデルのパラメータを同定し、その同定値を用いてO2センサ出力の未来値を推定し、さらにその未来値を用いてO2センサ出力を所定の目標値に収束させるように排気系Eへの入力を規定する操作量を求める。パラメータの同定においては、モデルの出力とO2センサ6の出力との偏差にフィルタリング処理を施したものを最小化するように、パラメータを同定する。フィルタリング処理の周波数に対するゲイン特性は、排気系Eの周波数特性に影響を及ぼす排ガス流量に応じて適宜変更される。
(もっと読む)
駆動制御系設計支援装置、駆動制御系設計支援プログラム、駆動機構設計支援装置、駆動機構設計支援プログラム及び記録媒体
【課題】本発明は、駆動機構を動作させるアクチュエータを駆動制御する駆動制御系と当該駆動機構の開発支援を行う駆動制御系設計支援装置、駆動制御系設計支援プログラム、駆動機構設計支援装置、駆動機構設計支援プログラム及び記録媒体に関する。
【解決手段】駆動制御系設計支援装置1は、オフラインシミュレーション部10で、制御系MCU80の設計情報に基づいて制御系MCU80をオフライン駆動制御系モデルとしてモデル化して、当該オフライン駆動制御系モデルを用いてオフラインでシミュレートし、リアルタイムシミュレーション部20で、オフライン駆動制御系モデルをリアルタイムマシンに実装して、制御対象の読取駆動機構系90をリアルタイムでシミュレートする。そして、最適化計算部40が、リアルタイムシミュレーション部20でシミュレートするオフライン駆動制御系モデルの各パラメータをリアルタイムで最適化する。
(もっと読む)
電動機制御装置の制御パラメータ感度解析装置および電動機制御装置の制御パラメータ設定方法
【課題】 制御パラメータの設定具合により目標の周波数特性となるゲイン余裕や位相余裕を予測することが可能な電動機制御装置の制御パラメータ感度解析装置および電動機制御装置の制御パラメータ設定方法を提供する。
【解決手段】 電動機1または機械5からなる被検出体の動作量を検出する検出手段2と、指令信号を発生する指令器4と、指令信号を受けて電動機1を駆動する制御器3とからなる電動機制御装置において、制御器3の特性を含まない開ループ周波数応答特性を計測する開ループ周波数応答特性計測手段6と、電動機制御装置の制御器の制御器モデル23と、計測した開ループ周波数応答特性と制御器モデルから一巡開ループ周波数応答特性を算出する演算手段7と、制御器の制御パラメータと一巡開ループ周波数応答特性の変化の関係を感度解析する感度解析装置12を備えている。
(もっと読む)
装着式動作補助装置及び制御用プログラム
【課題】 装着者の個人差や体調等の変動要因によらず、制御方法に応じた効果を発揮することのできる装着式動作補助装置及び制御用プログラムを提供することを解決すべき課題とする。
【解決手段】 動作補助装置10では、装着者12に装着された状態において当該装着者12固有の動力学パラメータをパラメータ同定部160により同定し、該同定した動力学パラメータを代入した運動方程式に基づき制御装置100により駆動源140を制御するように構成してあるため、装着者12の個人差や体調等の変動要因によらず、制御装置100に適用される制御方法に応じた効果を発揮することができる。
(もっと読む)
制御装置
【課題】 外乱に起因する出力の揺らぎなどを抑制でき、制御対象の出力の高い安定性および制御精度を得ることができる制御装置を提供する。
【解決手段】 制御装置1は、検出された制御対象の出力Cainを所定値Cain_shに保持する仮想干渉力Fvsを発生させるために、制御対象に入力される仮想干渉入力Ushを算出し、仮想干渉入力Ushが入力された制御対象を拡大制御対象とし、拡大制御対象に入力される仮想制御入力Wcainを、拡大制御対象の出力Cainが設定された目標値Cain_cmdに収束するように、所定の応答指定型制御アルゴリズム[式(4)〜(9)]に基づいて算出する(ステップ5)。
(もっと読む)
制御システムの解析のための方法
本発明は、ブロック線図環境においてモデル化された複雑な非線形動的システムに対して、コントローラを系統的にユーザが解析し、設計することを可能とするフレームワークを提供する。非線形プラントモデル(ブロック線図)から線形化したモデルを抽出することにより、ユーザは、線形システムに対して、利用可能な1以上の制御設計およびチューニング方法を使用することができる。クロスカップリングや外因性の攪乱等の複雑な副次的作用を、設計中にリアルタイムで見て処理することができる。設計の結果は、自動的にブロック線図において実行される。
 (もっと読む)
(もっと読む)
サーボ制御装置とその制御方法
【課題】 少ない計算量で、外乱抑圧特性を向上させるだけでなく、完全に位置指令θrとアーム位置θaを一致させることができるサーボ制御装置を提供する。
【解決手段】 制御対象の制御量xdが指令refに一致するようにフィードバック制御器と、フィードフォワード制御器と、オブザーバとを備えたサーボ制御装置において、フィードバック制御器は、オブザーバによる状態量推定値shにゲインGを乗じたものを第2の操作量tfb2にフィードバックする構成であり、フィードフォワード制御器は、操作量trefから前記制御量xdまでの伝達関数P1の逆関数P1−1および、制御対象の状態量を検出する検出器の出力xfbから制御量xdまでの伝達関数P2の逆関数P2−1を含むようにした。
(もっと読む)
モデル予測制御装置
【課題】 処理負荷の増大に対して対処可能で、かつロバスト性を確保するモデル予測制御を提供すること。
【解決手段】 モデル予測制装置1は、フィードバック処理部50を備え、制御対象2の状態量あるいは制御量の実測値をフィードバックして、最適操作量検索部10における検索範囲あるいは予測値、内部状態推定部20における推定値を実測値により補正する。すなわち、フィードバックされた状態量あるいは制御量の実測値に基づいて、操作量候補算出部による操作量の算出範囲を設定して(FB1)無駄な演算を省略する。また、モデル予測部13への入力である操作量候補、出力である制御量、又は制御対象へ入力する最適制御量を補正し(FB2〜5)、さらには内部状態推定部からの出力を補正して(FB5、6)、予測精度を高める。
(もっと読む)
モデル予測制御装置及び方法
【課題】 故障や誤動作を回避できるモデル予測制御装置及び方法を提供すること。
【解決手段】 モデル予測制御装置1の最適操作量検索部10は、制御対象のモデルを用いて制御量を予測し、これに基づいて評価値を算出して、操作対象の最適操作量を検索する。操作対象検索部50は、最適操作量検索部10における予測制御量又は評価値が許容範囲を超えて、現在の操作対象による操作では有効な制御ができない場合、新たな操作対象を検索して決定する。最適操作量検索部10は、新たな操作対象に関してモデル予測制御を行なって最適操作量を検索する。このようにして、故障や誤動作を未然に回避する制御が行なえる。
(もっと読む)
歩行パターン作成装置、2足歩行ロボット装置、歩行パターン作成方法、2足歩行ロボット装置の制御方法、プログラムおよび記録媒体
【課題】パラレルリンク機構の2足歩行ロボット装置に安定した2足歩行を行わせることができる歩行パターンを作成する歩行パターン作成装置を提供することを目的とする。
【解決手段】足部(足底部)を備えた脚部と腰部とから成る2足歩行ロボット装置の歩行パターンを作成する歩行パターン作成装置であって、足部において目標ゼロモーメントポイントを設定し、設定した目標ゼロモーメントポイントに応じて腰部のモーメント補償軌道を算出し、絶対座標系における腰座標系の原点と絶対座標系における足座標系の原点とから腰座標系から見た足部の位置を算出し、絶対座標系から見た足座標系の姿勢を表わす回転行列と絶対座標系から見た腰座標系の姿勢を表わす回転行列とから腰座標系から見た足座標系原点の姿勢を表わす回転行列を算出して足座標系原点の姿勢を表わす回転行列により足部の姿勢を算出する。
(もっと読む)
工程パラメータの平均値の所望値への段階的制御
多段階制御機(610)は、工程を行うシステム(620)の稼動を指示する。前記工程は、複数の工程パラメータ(MPP)(625)を有するが、MPP(625)の1つ以上が制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)の1つが目標設定工程パラメータ(TPP)(625)である。前記工程は、長さTPLAAV2の定義された時間におけるTPP(625)の実際平均値(AAV)に対する第1の限界を示す定義された目標値(DTV)を有する。前記AAVは、定義された期間におけるTPPの実際数値(AV)に基づいて計算される。第1論理制御器(630)は、少なくとも長さがTPLAAV2であり、現在時点T0から未来時点TAAV2まで延長される第1未来時間(FFTP)においてTPPの未来平均値(FAV)を予測し、このとき、前記TAAV2以前にTPP(625)が定常状態に移動する。FAVは、(i)長さがTPLAAV2以上であり、過去時点T−AAV2から現在時点T0まで延長される第1過去時間(FPTP)における様々な時点でのTPP(625)のAAV、(ii)MPP(625)の現在値、及び(iii)DTVを基にして予測される。第2論理制御器は、TPLAAV2の長さより短くTPLAAV1と等しい長さを有し、現在時点T0から未来時点TAAV1まで延長される第2未来時間(SFTP)の間にTTP(625)のAAVに対する第2の限界を示す追加的目標値(FTV)を確立する。FTVは、FFTPにおいて予測されたTPP(625)のFAVのうちの1つ以上に基づいて確立される。また、第2論理制御器は、(i)TPLAAV1の長さを有し、過去時点T−AAV1から現在時点T0まで延長される第2過去時間(SPTP)における様々な時点でのTPP(625)のAAV、(ii)MMP(625)の現在値、及び(iii)FTVに基づき、CTPP(615)各々に対する目標設定点を決める。第2論理制御機は、前記CTPP(615)に対して決められた目標設定点に従ってCTPP(615)各々の制御を指示する論理をさらに有する。 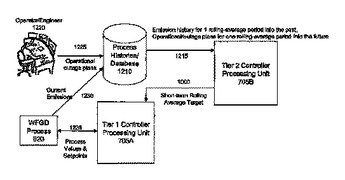 (もっと読む)
(もっと読む)
大気汚染制御工程のモデル予測制御
汚染物質の排出を制御する工程を行う大気汚染制御システム(620)の稼動を指示するための制御機(610)は、複数の工程パラメータ(MPP)を有する。MPP(625)のうちの1つ以上は、制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)のうちの1つは、システム(620)により排出された汚染物質(AOP)(640)の量である。定義されたAOP(640)値(AOPV)は、前記排出されたAOP(640)の実際値(AV)に対する目的または限界を示す。制御機(610)は、各CTPP(615)と排出されたAOP(640)との関係を示す、神経回路網工程モデル又は非神経回路網工程モデルのいずれかを含む。制御演算装置(630)は、前記モデルに基づき、各CTPP(615)の現在値に対する変化が排出されたAOP(640)の未来AVにどのように影響を及ぼすかを予測し、前記変化の予測された影響及びAOPVに基づいて1つのCTPP(615)の変化の1つを選択し、CTPP(615)に対して選択された変化により前記1つのCTPP(615)の制御を指示する。 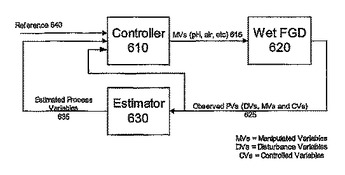 (もっと読む)
(もっと読む)
システムモニタリングモデルの更新用システム、デバイス、及び方法
複数モニタリングモデルの更新用システム(102)が提供される。システムは、モニタリングされる複数システム(104a,104b,104c)の各々に対して、モニタリングされる特定システムと、複数推定モデルの少なくとも1つとの間の連関を決定するモデル連関モジュール(202)を有している。各推定モデルは、複数の別個のセットの推定プロパティの1つに基づいており、各セットは、特定の推定モデルに一義的に相応している。システムは、少なくとも1つの推定プロパティを更新し、更新された推定プロパティを各推定モデルに伝送する更新モジュール(204)を有しており、各推定モデルは、更新された少なくとも1つの推定プロパティを含む別個のセットに相応する。システムは更に、更新された少なくとも1つの推定プロパティを含む別個のセットに相応する各推定モデルを修正するモジュール修正モジュール(206)を含む。  (もっと読む)
(もっと読む)
指令パラメータ設定方法とモーション制御装置
【課題】システムの振動を低減する指令のパラメータを、簡単に決定できるようにする。
【解決手段】サーボ制御装置へ指令のパラメータを出力しモータを制御するモーション制御装置において、移動距離distと移動時間tbを入力する動作条件入力部と、振動周期tfを入力する振動入力部と、移動距離と振動周期を入力して振動低減パラメータを導出し、モータ指令計算部に出力する振動低減パラメータ導出部と、振動低減パラメ−タを入力してモータ指令を生成しモータ指令出力部に出力するモータ指令計算部と、モータ指令をサーボ制御装置に出力するモータ指令出力部とを備え、振動低減パラメータ導出部は動作条件と振動周期の比xを求め、予め求めておいた関数F(x)にx=tb/tfの値を代入して指令のパラメータを決定する。
(もっと読む)
サーボ制御装置
【課題】 光ピックアップのアクチュエータ等のディジタルサーボ制御装置において、近似法を用いることなく連続時間系の制御対象を離散時間系の補償器で制御することにより、低コストで高精度の制御を可能とする。
【解決手段】 バネ支持されたアクチュエータのディジタルサーボ系において、連続時間制御対象を「リフティングを用いたサンプル値H∞制御理論」によって近似なく設計した離散時間補償器を有することで、比較的サンプル時間の長いシグナルプロセッサを用いたディジタルサーボ系においても、また、高転送レート化の図られる光ディスクシステムにおいても、信号の離散化によるサンプル点間の近似化を回避し、優れたノミナル性能とロバスト安定性を有する光ピックアップを提供する。
(もっと読む)
産業プロセスのための最適制御問題を生成する方法
本発明は、産業プロセスのモデル化のための、ミクスト・ロジカル・ダイナミック(MLD)フレームワークの使用を単純化し、前記産業プロセスのための、最適制御問題及びスケジューリングへの適用を自動的に生成して解くことを可能にする。本発明のコアとなる技術的アスペクトは、任意に接続された二つのMLDブロックを自動的にマージすることによって、一つの複合MLDブロックを得ることにある。この手順を繰り返して使用することにより、産業プロセスの完全な記述を含む、いかなる複雑なシステムであっても、最も単純なMLDビルディング・ブロックから、生成することが可能になる。最適制御問題は、一義的なアウトプットが問題のコスト汎関数となるMLDブロックを付け加えることにより生成される。グラフィカルな環境において、いかなる特定の産業プロセスも、ベーシックなMLDエレメントまたはアトミックなMLDブロックのライブラリーからの例示するブロックにより、且つ、それらを適切に接続することにより、再現することが可能である。適切なライブラリーが利用可能なケースにおいては、上記のグラフィカルな相互接続を構築するための能力を除いては、このプロセスは、エンド・ユーザーに対して専門的な知識を要求しない。  (もっと読む)
(もっと読む)
101 - 120 / 124
[ Back to top ]