
Fターム[5H004LA12]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 数式で表されているもの (208) | 微分、差分、状態方程式で表されているもの (124)
Fターム[5H004LA12]に分類される特許
21 - 40 / 124
モデリング・システムの処理システム、方法及びプログラム
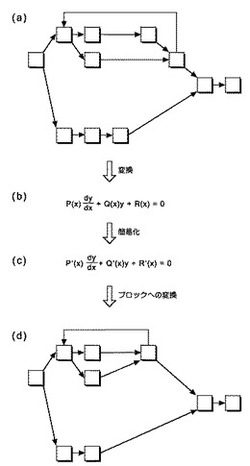
【課題】設計のためのモデリング・ツールにおいて、定量基準によりシステム表現の簡略化可能部分を自動判別する。
【解決手段】SysMLのブロックから数式が抽出され、または、Simulink(R)のブロック線図が微分方程式に変換され、その係数は、級数展開される。先ず、微分方程式を、CASにより通常どおり解きその解も、好適には級数展開される。次に、区間解析の技法により、区間係数として、CASによって微分方程式を含む数式を解く。区間解析の結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数を0にして、CASによって微分方程式を含む数式を解く。そこで再度、結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数の項を微分方程式から落とし、微分方程式を簡易化する。
(もっと読む)
発電プラントの熱効率を最大化するシステム及び方法
発電プラントの熱効率を最大化する方法であって、その方法は、利用可能な測定データから現在のプラント状態を得ることと、その現在のプラント状態を表す一群の変数を得ることと、その変数に一群の制限条件を当てはめることと、修正した発電プラントの状態を表す修正した一群の変数を発生させることと、数学的モデルの中で修正した一群の変数の収束判定をすることとを具える。修正したプラント状態を表す修正した一群の変数を発生させることは、オイラーの方程式、質量保存方程式および可逆連続体の数学的記述に基づく。これに関連して、発電プラントの熱効率を最大化するシステム及びコンピュータプログラムを提供する。 (もっと読む)
化学的エンジニアリング工程を制御する明確なスイッチを有する二自由度制御方法

本発明は、プロセスエンジニアリング工程の閉ループ制御を実行する方法に関し、目標値の軌跡が閉ループ制御変数に提供され、プロセスの閉ループ制御変数及び更なる状態変数が検出され、制御誤差及びこれに基づく閉ループ制御操作変数が制御アルゴリズムによって算出され、加えてパイロット制御操作変数が決定され、生成操作変数が、閉ループ制御操作変数及びパイロット制御操作変数から算出され、プロセス中に設定される。制御アルゴリズム及びまたはパイロット制御の構造は、閉ループ制御変数、更なる状態変数及び/または目標値の軌跡の関数として変更される。更に、本発明は、閉ループ制御装置及び本方法を実行するコンピュータプログラムに関する。 (もっと読む)
フィードバック制御装置とフィードバック制御方法
【課題】むだ時間を含む制御対象に対して、安定して制御を行うことができ、かつ、制御量の応答性が良好となるフィードバック制御装置と、フィードバック制御の制御方法とを提供する。
【解決手段】制御量を検出する検出手段と、むだ時間を除いた制御対象の伝達関数の逆モデルに、制御量を入力して、第一出力値を得る第一出力値計算手段と、操作量から、第一出力値を減算して、第二出力値を得る第二出力値計算手段と、むだ時間を除いた前記制御対象の伝達関数に、第二出力値を入力して、第三出力値を得る第三出力値計算手段と、目標値から、制御量を減算して、制御偏差を得る制御偏差計算手段と、制御偏差から、第三出力値を減算して、補正された制御偏差を得る制御偏差補正手段と、補正された制御偏差を入力して、操作量を得るPID制御器と、を具備するものである。
(もっと読む)
状態推定装置及び制御装置
【課題】制御対象の状態(例えば速度)を精度良く推定でき、且つ、サンプル遅れを防止可能な状態推定装置を提供する。
【解決手段】制御対象であるプラントへの制御入力と前記プラントの状態とに基づき前記プラントの状態変数を推定する、オブザーバを含んで構成された状態推定装置11において、前記オブザーバは、前記プラントの状態のサンプリング値であって時間間隔が互いにN(Nは2以上の整数)サンプル離れたサンプリング値と、前記制御入力の連続するサンプリング値とに基づいて、前記状態変数を推定する。
(もっと読む)
制御装置
【課題】一部の制御出力の偏差を見かけ上0とする特定の状況下において、有利な制御入力を再現できるようにする。
【解決手段】内燃機関またはこれに付帯する装置に係る複数の制御出力をそれぞれの目標値に追従させる制御を実施するものであって、制御出力とその目標値との偏差の時間積分xz及びそれ以外のものxyを含む、各制御出力毎に個別の状態変数を参照して、線形入力及び非線形入力を反復的に演算するスライディングモードコントローラ51と、ある制御出力の偏差を0と見なす特定期間にあるときに、前記非線形入力を規定する、当該制御出力に係る状態変数xz及びxyについての多項式Szxz+Syxyを0とする補正制御部52とを具備する制御装置5を構成した。ここで、Szは切換超平面を構成する行列Sの成分のうち前記状態変数xzに乗ずる列ベクトルであり、Syは同行列Sの成分のうち前記状態変数xyに乗ずる列ベクトルである。
(もっと読む)
制御装置
【課題】制御出力とその目標値との偏差の時間積分を状態変数とし、その状態変数を参照して線形入力及び非線形入力を反復的に演算するスライディングモードコントローラを利用して内燃機関またはそれに付帯する装置を制御する際に、前記状態変数に基づき算出される切換関数ベクトルの絶対値の増大を防ぎ、過渡域での制御性及び排気の改善を図る。
【解決手段】内燃機関またはそれに付帯する装置を制御する制御装置(ECU)に、スライディングモードコントローラと、状態変数に基づき算出される切換関数ベクトルが所定の変化量だけ変化したと仮定したときに生じる前記非線形入力の変化量に対応する制御出力の変化量の絶対値が所定の閾値を下回るという条件が成立した際に状態変数の更新を停止するとともに、状態変数の更新を停止している期間において制御出力とその目標値との偏差の正負が変化した際に状態変数の更新を再開する補正制御部とを備える。
(もっと読む)
スライディングモード制御系の設計方法及びその設計支援装置
【課題】スライディングモード制御系の簡易な設計方法を提供すること。
【解決手段】等価制御入力(u1)を算出する等価制御器(11)、切換関数(σ)の値に比例した制御入力(u2)を算出する比例到達制御器(13)、切換関数(σ)に基づいて決定され制御対象の状態に対して非線形な制御入力(u3)を算出する非線形制御器(14)、並びに、三つの制御入力(u1、u2、u3)を加算して制御入力(u)を算出する加算器(15)を備えたスライディングモード制御系(10)の設計方法は、制御対象を線形制御系で制御する場合の状態フィードバックゲイン(Fc)を算出するステップ、及び、状態フィードバックゲイン(Fc)によって導出される制御入力が制御入力(u1)と制御入力(u2)との合計に等しいものとして等価制御器(11)及び比例到達制御器(13)を設計する設計ステップ、で構成される。
(もっと読む)
多変数プロセス制御においてモデルの品質を推定しモデルを適応させる装置およびその方法
【課題】少ないデータ要求で、かつ、プロセスの通常操業の障害となることなく、プロセスの動的モデルを審査・更新する装置およびその方法を提供する。
【解決手段】本発明の動的モデルの審査・更新装置およびその方法は、開始モデルとして制御器の既存のモデルを用いて試験器を構成し、プロセス変数に摂動を加え、データを収集してスライスし、モデル品質の推定により不良サブモデルを同定し、不良サブモデルに関係するプロセス変数にさらなる摂動を加えることで不良サブモデルを再同定し、この新たに同定したサブモデルで制御器をオンラインで更新する。更新により、制御器に改良モデルが得られる。
(もっと読む)
除振システム、除振方法及びプログラム
【課題】多入力多出力を扱え、かつ非振動的な除振制御が可能であり、システム変動に頑強な制御を実現する。
【解決手段】搭載物が載置される定盤1を駆動する複数の駆動部3bに対応して配置された複数のセンサ3aにより、定盤1の状態量を計測する。次に、定盤1についての複数の状態量及び定盤1の運動方程式に基づいて、スライディングモード制御により、該当する駆動部3bに対する制御量を作成し、出力する。
またカルマンフィルタ9をさらに備え、制御部は、複数のセンサ3aのうち一部のセンサから取得した状態量をカルマンフィルタ9に入力し、カルマンフィルタ9で推定された他の状態量と一部のセンサから取得した状態量及び定盤1の運動方程式に基づいて、該当する駆動部に対する制御量を算出することが好適である。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御の制御偏差が小さいときに制御用アクチュエータの消費電力を低減するとともに、目標値が変化したときに良好な追従性能を得ることができるプラントの制御装置を提供する。
【解決手段】 プラントの制御量が目標値に一致するようにフィードバック操作量UFBを算出し、フィードバック操作量UFBを平均化することにより平均化フィードバック操作量UFBAVを算出する。プラントの作動状態に応じて保持操作量UHOLDを算出し、保持操作量UHOLDと平均化フィードバック操作量UFBAVとを設定比率KRに応じて合成し、修正保持操作量UHLDCを算出する。出力操作量UFMを一定値に保持できるときは、出力操作量UFMを修正保持操作量UHLDCに設定するとともに、フィードバック操作量UFBを修正保持操作量UHLDCに設定する。
(もっと読む)
サーボ制御装置
【課題】工作機械等に適用するサーボ制御装置において、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制する。
【解決手段】制御回路20,30と電流制御部3とサーボモータ1と送り機構10とテーブル2を含むサーボ制御系Iの周波数特性を測定する。しかも、テーブル2の移動範囲を多数に区分した各区間に対応して周波数特性を測定する。この周波数特性と逆特性となっている逆周波数特性を、各区間毎に求める。そして、実作業時には、テーブル2が位置している区間に対応した逆周波数特性をディジタルフィルタ121に設定する。そうすると、ディジタルフィルタ121とサーボ制御系Iを合わせた伝達関数が1となり、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制することができる。
(もっと読む)
プラント制御システムおよび制御方法
【課題】同定波形採取のための同定実験を行わず、プラントの立ち上げデータを用いてプラントの同定、及び、制御パラメータの調整を実現可能とするプラント制御システムを提供する。
【解決手段】システム支援ツール100は、制御装置200内の各部(MPC制御部210,PID制御部220)および制御対象230の起動制御を行って各部を起動する。各部を起動することで、制御量(PV),操作量(MV),設定値(SV)に関する各ゾーン毎のデータを、システム支援ツール100のデータロギング機能を用いて採取する。システム支援ツール100は、立ち上げデータを元に同定機能を用いて、プラントのモデルパラメータを推定する。そして制御パラメータ調整機能を用いて、モデル予測制御(MPC)部210及びPID制御部220に係る制御パラメータを同定結果のモデルパラメータを使って計算する。
(もっと読む)
自走式移動体の制御システム
【課題】実時間制御において、複合的な目的を達成するとともに作業時間を短縮することが可能な自走式移動体の制御システムを提供する。
【解決手段】自走式掃除機100の制御システム1は、変位可能な本体110と、本体110に取り付けられ、本体110に対して変位可能なアーム120と、本体110を駆動するための車輪駆動用モータユニット133と、アーム120を駆動するための第1のサーボ127と第2のサーボ128と、コンピュータ200とを備え、コンピュータ200は、本体110の変位に関する因子とアーム120の変位に関する因子との両方の因子に基づいて本体110の挙動とアーム120の挙動とを評価する評価関数を利用して、本体110の挙動とアーム120の挙動とを制御するように車輪駆動用モータユニット133と第1のサーボ127と第2のサーボ128とを最適制御する。
(もっと読む)
線状構造体位置制御システム、線状構造体の位置制御方法及び移動構造体制御システム
【課題】掘削船から延びるライザー管のリエントリ作業を短時間に効率よく行う。
【解決手段】掘削船から延びるライザー管のリエントリ作業を行う際、ライザー管の掘削船に対する傾斜角度と、ライザー管の下端の位置と、掘削船の現在の位置の情報とを計測し、計測した傾斜角度の情報と、下端の位置の情報と、掘削船の現在の位置の情報とに基づいて、指定された掘削船の指定位置に対するフィードバック制御信号を生成し、このフィードバック制御信号を、掘削船に搭載された位置制御装置に供給する。
(もっと読む)
フィードバック制御ゲインの設定方法及び設定支援プログラム
【課題】非反証制御の考え方をオフラインでの制御系設計に適用し、制御ゲインの最適値を計算によって求め得るようにして、設定の容易化を図るとともに、多入力多出力系にも適用可能な画期的な方法を提供する。
【解決手段】制御対象(プラント)Pにステップ入力等を加えたときの入出力応答データを少なくとも1つ採取する(ステップS1)。このデータに基づいて所定数以上の仮想の入出力応答データを生成し(S2,S3)、これらをそれぞれ反証演算式に代入してパラメータ空間に所定数以上の非反証領域を規定する(S4)。反証演算式を線形制約式とすることで、所定数以上の非反証領域の積集合の領域において制御ゲインの最適値を計算により求めることができ(S5)、多入力多出力系にも適用可能になる。
(もっと読む)
モデル不一致を補償するためのチューニングを有する頑健な適応モデル予測コントローラ
MPC適応およびチューニング技法は、MPCタイプコントローラにおいて今日一般に使用される方法に比べて良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で従来のMPC技法に比べて良好に働くMPC適応/チューニング技法をもたらす。MPCコントローラ性能は、コントローラ適応/チューニングユニットをMPCコントローラに追加することによって高められ、その適応/チューニングユニットは、最適化ルーチンを実施して、特定の量のモデル不一致またはある範囲のモデル不一致の存在下でオンラインプロセス制御中にMPCコントローラ内で使用するための、最良のまたは最適な一組のコントローラ設計および/またはチューニングパラメータを確定する。適応/チューニングユニットは、以前に確定されたプロセスモデルおよび既知のまたは予想されるプロセスモデル不一致またはプロセスモデル不一致範囲に基づいて、たとえば、MPC形態、MPCコントローラおよび観測器のいずれかまたは両方についてのペナルティ因子、およびMPCコントローラで使用するためのコントローラモデルを含む、1つまたは複数のMPCコントローラチューニングおよび設計パラメータを確定する。閉ループ適応サイクルは、予測誤差または制御誤差に対して自己相関解析を実施して、有意のプロセスモデル不一致がいつ存在するかを判定してもよく、または、所定期間にわたって、プロセスモデル不一致の増減を判定してもよい。  (もっと読む)
(もっと読む)
制御パラメータ調整方法および制御パラメータ調整プログラム
【課題】一組の試験データから直接に制御パラメータを決定できるようにする。
【解決手段】制御対象11に開ループで操作量u(t)を与えて制御する制御装置12の伝達関数C(x)を決定する制御パラメータxを、目標値r(t)に対する制御対象11の制御量y(t)の応答が参照モデルMに近づくように調整する際に、制御対象に時刻とともに変化するテスト入力信号列u1(t)を与えて制御量の時間変化であるテスト出力信号列y1(t)を採取し、誤差‖Mr(t)−PC(x)r(t)‖を変形した評価関数Jを最小にするように制御パラメータxを決定する。評価関数Jは、y1(t)=Pu1(t)に注意すると、未知の制御パラメータxで表される制御装置12の伝達関数C(x)と、既知の伝達関数M、テスト入力信号列u1(t)およびテスト出力信号列y1(t)とで表されて、J=‖Mu1(t)−C(x)y1(t)‖となる。
(もっと読む)
プラント運転支援装置
【課題】実プロセスに試験操作を与えることなくプロセス制御装置に適切な制御パラメータを求め、求めた制御パラメータを実プロセスに反映させることができるプラント運転支援装置を実現すること。
【解決手段】実プラントからオンラインで実測データを収集してその内部モデルを更新することにより高精度のシミュレーション結果を得るオンラインシミュレータと、制御性能確認部と制御パラメータ解析部を含む解析部と、これら実プラントおよび解析部に対する操作設定を行う操作設定インタフェースとを備え、
前記解析部は前記オンラインシミュレータから状態変数の値を受け取り試験操作を行ってプロセスの応答を得ることにより前記実プラントに適切な制御パラメータを求め、これら求めた制御パラメータを前記操作設定インタフェースを介して前記実プラントに反映させることを特徴とするもの。
(もっと読む)
21 - 40 / 124
[ Back to top ]