
Fターム[5H004LA13]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 周波数特性が記載されているもの (54)
Fターム[5H004LA13]に分類される特許
1 - 20 / 54
駆動システム及び駆動方法、並びに露光装置及び露光方法
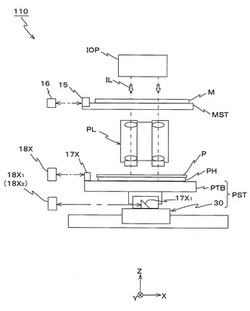
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
設計装置及び設計プログラム

【課題】出力信号に含まれているノイズに係わらず、簡単な計算により最適な制御器を設計する。
【解決手段】入力信号u0を少なくとも1回入力して、制御対象Pから出力された出力信号y0を少なくとも1回計測することにより、少なくとも1回分の入出力データ(入力信号u0及び出力信号y0)を計測する。さらに、出力信号y0に対してスプラインフィッティングを行い、データを平滑化して、出力信号y0から雑音vを除去した出力データysを得る。さらに雑音vを除去した出力データysを線形独立なベクトルの組とし、制御対象Pの線形性に基づいて、目標出力信号y~との線形結合係数列θを算出し、当該線形結合係数列θを用いて、入力信号u0から目標入力信号u~を算出する。算出された1組の目標入力信号u~及び目標出力信号y~と参照モデルMに入力される参照信号r~との偏差e~から制御器Cの伝達関数を決定することにより、制御器Cを設計する。
(もっと読む)
適応制御装置および適応制御方法ならびに射出成形機の制御装置および制御方法
【課題】 応答性の悪化を防止しつつ最適な適応制御を自動的かつ簡単に行うことができる適応制御装置および適応制御方法ならびに射出成形機の制御装置を提供する。
【解決手段】 制御対象2から出力される制御値yに並列フィードフォワード補償器4から出力される補償値yfを加えた帰還値yaと指令値rに基づいて操作値uを出力するようにしてフィードバック制御を行う適応制御装置であって、並列フィードフォワード補償器4は、制御対象2の周波数応答特性を逐次推定する同定機構6と、当該周波数応答特性に基づいて補償値yfを調整する調整機構7とを備えている。
(もっと読む)
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
【課題】十分な位相余裕が確保されるようにノッチフィルタのノッチ幅を調整する。
【解決手段】適応ノッチフィルタは、ノッチフィルタと、該ノッチフィルタの幅を表すパラメタを調整するパラメタ調整部と、を備える。パラメタ調整部は、パラメタの候補値よりも広い幅を表す値を試行し、検出された振動が試行期間の完了まで基準内に収まっている場合にパラメタを候補値に設定する。検出された振動が基準を超えた場合に試行を中断して前記パラメタを試行前の値に戻してもよい。
(もっと読む)
フィードバック制御回路、フィードバック制御システム
【課題】回路規模やコスト、消費電力を低減しつつ、信号伝達遅延を抑制することが可能なフィードバック制御回路、及びこれを一部に含むフィードバック制御システムを提供する。
【解決手段】入力信号を増幅する増幅手段12と、前記増幅手段の出力信号に対して積分演算を行う一段以上の積分手段30と、前記積分手段の少なくとも一部をバイパスして信号を伝達する一以上のフィードフォワード経路FF1と、前記積分手段から入力される信号と前記フィードフィードフォワード経路を介して入力される信号を加算する加算手段22と、前記加算手段の出力を量子化して出力信号を生成する量子化手段32と、前記量子化手段により生成される出力信号を、前記一段以上の積分手段のうち最終段の積分手段の入力側に伝達するフィードバック経路FB1と、を備えるフィードバック制御回路。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 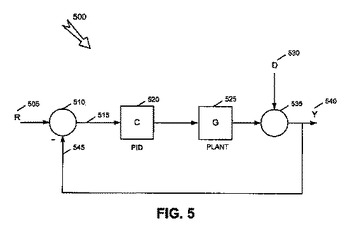 (もっと読む)
(もっと読む)
制御装置及び露光装置
【課題】制御モデルの同定を最適化し、以ってフィードフォワード制御による高精度な位置制御を行う。
【解決手段】制御対象物の制御特性を表すモデルを用いた完全追従制御により前記制御対象物をフィードフォワード制御するフィードフォワード制御手段を備えた制御装置において、前記モデルは、前記制御対象物の周波数応答曲線における第1の変曲点が周波数10Hzより低い領域に存在し、且つ、第2の変曲点が前記第1の変曲点の周波数より高く周波数10Hzより低い領域に存在している場合に、前記第1及び第2の変曲点を含む周波数範囲において前記周波数応答曲線との誤差が最小となるようにモデルパラメータが設定されている。
(もっと読む)
電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法
【課題】垂直軸や外力が掛かる状況で大きなストロークで使用する電動機が含まれる複数軸の軸間を含む機械特性を多軸伝達関数として測定するとともに、制御器の安定度を把握し、機械特性に合わせた軸間を含めた制御器の調整度合いを把握できる相互一巡開ループ伝達関数を算出する電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法を提供する。
【解決手段】複数軸の電動機制御装置において、自己一巡開ループ伝達関数算出部8と、相互一巡開ループ伝達関数算出部9と、機械特性演算部11と、特性演算部10と、を備える。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データが利用されて、仮想のコントローラ51と仮想のプロセス52のモデル化が行なわれ、そして、得られたプロセス52のモデルが用いられて、コントローラ51の最適な制御パラメータが算出される。コントローラ10のチューニングに際し、算出された制御パラメータの数値を参考にすることができる。なお、チューニング装置100では、コントローラ51(制御ループ)ごとに制御性を評価し、制御性が低いと判断されたコントローラ51についてのみ、上記のモデル化や最適な制御パラメータの算出等が実行される場合がある。
(もっと読む)
むだ時間同定装置
【課題】 制御対象の特性によらず、容易にかつ確実に正確にむだ時間を同定することができるようにする。
【解決手段】 モータ速度を入力し前記モータ速度が発振しているかどうかを判定した結果を示す発振検出信号を出力する発振検出器106と、前記モータ速度を入力しその入力信号に基づいて制御対象のメカパラメータを同定し出力するメカ同定器107と、前記発振検出信号を入力し前記モータ速度は発振していなければ速度制御器に設定するパラメータである制御ゲインをさらに大きい値として出力する制御ゲイン調整器108と、制御ゲインと発振検出信号とメカパラメータを入力し臨界周波数を出力する臨界周波数演算器109と、前記制御ゲインと前記発振検出信号と前記メカパラメータと前記臨界周波数を入力しむだ時間同定値を算出するむだ時間同定器110と、を備える。
(もっと読む)
モータを用いた駆動系の捩り振動制振制御方法
【課題】機差に応じた補正を行って効果的な捩り制振を行う方法を提供する。
【解決手段】動力源から車輪に到る駆動系にモータが含まれるとともに、その駆動系を捩り振動系としてモデル化した捩り振動モデルにおける捩り振動を抑制するために予め用意した数式モデルに基づいて前記モータをフィードフォワード制御することにより前記駆動系における捩り振動を抑制する、モータを用いた駆動系の捩り振動制振制御方法において、前記捩り振動系における前記モータを除いたいずれかの回転角度を基準とし、その基準となる回転角度の変化量に対する前記モータの回転角度の変化量の比の設計値と実測値との偏差Δαを求め、その偏差に基づいて、前記数式モデルにおける捩り変位を抑制する係数の設定値を補正する。
(もっと読む)
サーボ調整方法および装置
【課題】機械の条件が変動しても、フィードバック制御系の安定を確保することができるするサーボ調整方法を提供する。
【解決手段】複数の異なる条件の下で、それぞれ前記フィードバック制御系の周波数伝達関数を表すゲイン、位相の周波数特性を測定し、各条件の周波数特性の測定結果に基づいて、各周波数におけるゲインの最大値と、位相の最小値とを求め、各周波数におけるゲインの最大値からゲインの最大抱絡線と、位相の最小値から位相の最小抱絡線を求め、ゲインの最大抱絡線、位相の最小抱絡線を基準にして、ゲインの調整を行う。
(もっと読む)
制御システムおよび制御支援装置
【課題】より適切なサーボの制御条件の設定を短時間で実現する制御システムおよび制御支援装置を得ること。
【解決手段】負荷装置113を駆動するモータ112を制御するサーボシステム100と、前記サーボシステム100に接続され、前記モータ112を所定の目標動作に制御するために設定される調整パラメータの最適値を自動調整する制御支援装置200と、で構成され、前記制御支援装置200における調整パラメータ調整部210はシミュレーション結果に基づいて、調整すべきパラメータやその調整範囲を自動設定し、調整範囲内で調整パラメータの最適値をモータ112の実動作の結果に基づいて自動調整する。
(もっと読む)
サーボアクチュエータ
【課題】誰でも簡便にゲイン調整を行うことができるサーボアクチュエータの実現する。
【解決手段】モータの速度を制御する速度フィードバックループを有し、この速度フィードバックループにノッチフィルタ手段を挿入して機械共振を除去するサーボアクチュエータにおいて、前記速度フィードバックループの周波数応答特性を示すデータを取得するデータ収集手段と、前記データ収集手段で取得されたデータを移動平均処理する移動平均手段と、この移動平均手段で得られたデータと、前記データ収集手段で得られたデータとを比較して、前記速度フィードバックループの共振特性を抽出する比較手段と、前記比較手段で抽出された共振特性に基づいて前記ノッチフィルタ手段の周波数及びQ値を設定するノッチフィルタ設定手段と、を備えることを特徴とする。
(もっと読む)
プロセス制御装置およびパラメータ最適調整方法
【課題】調整または試験段階における労力と時間を軽減しつつ、入出力にむだ時間を含むプロセスにおけるPI調節器およびPID調節器のパラメータを簡易な計算で決定するとともに、様々のプロセスに広く適用できるようにする。
【解決手段】最適調整手段13には、プロセス制御装置11として用いられるPI調節器またはPID調節器の時定数およびゲインをそれぞれ決定するゲイン決定手段13aおよび時定数決定手段13bが設けられ、ゲイン決定手段13aおよび時定数決定手段13bは、制御対象12のプロセスの目標値SVから制御量PVまでの閉ループ伝達関数Gcの絶対値が低周波帯域において1になるように、PI調節器またはPID調節器の時定数およびゲインをプロセスの係数から決定する。
(もっと読む)
誤差評価装置、誤差評価方法、誤差評価プログラム、および監視装置
【課題】観察対象の系から出力されたランダム信号をサンプリングして得られたランダム時系列データに基づいて求められたARMAパラメータの誤差を高精度に評価する。
【解決手段】ARMAパラメータの算出とは別にその系の伝達関数を求め、それよりゲインを算出し、
に基づいて誤差を求める。
(もっと読む)
ロボット制御カテーテルおよびその較正方法
心臓カテーテルのようなロボット装置を較正する方法は、第1振動周波数で第1振動ベクトルを与えることにより、第1作動軸において装置を振動させるステップを含む。装置を振動させている間に、装置の位置を周期的に測定して複数の位置データ点が生成され、複数の測定軸に関連して装置の位置が表されてもよい。その後、位置データ点は、フーリエ変換アルゴリズムのような信号処理アルゴリズムを用いて処理され、それにより装置の位置を作動軸の移動ベクトルに関連付ける伝達関数を導出する。伝達関数は、分解され、作動軸に対する較正ベクトルとして表現されてもよく、1つまたは複数の測定軸の各々に沿って方向づけられる、ゼロ成分を含む少なくとも1つの成分を含む較正ベクトルを含んでいてもよい。プロセスは、較正することが望ましい任意の作動軸に対して繰り返してもよい。 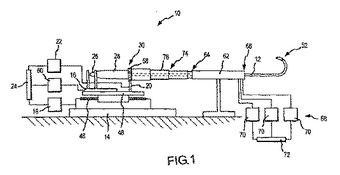 (もっと読む)
(もっと読む)
駆動制御装置
【課題】広範囲な角速度指令に対して、安定で高精度な角速度追従特性と角度精度を実現可能にする。
【解決手段】応答可能範囲を拡大すべく駆動指令を生成していた過程に、立ち上がり、立下りを考慮したプロファイル型指令生成器4と、高精度な追従特性を得るべく2自由度型モデル追従補償器7とで構成された制御系を具備するとともに、該制御系の上位制御器として、要求される角速度で安定に駆動すべく要求プロファイルや補償器を適応的に切り替えたり、全体システムの安定性に関する評価指標をリアルタイムで算出しながら、コントローラを自動的に設定する最適制御器9を備えた構成を採用する。
(もっと読む)
2自由度ディジタル制御装置
【課題】 1つの目標指令のみを与えるローコスト指令装置を用いて、制御出力を目標指令にオーバーシュートおよび定常偏差がなく高速高精度に追従させることができる2自由度ディジタル制御装置を提供する。
【解決手段】 目標指令を入力しフィードフォワード操作量を出力するフィードフォワード補償器13と、目標指令を入力しフィードフォワード指令を出力する前置補償器10と、フィードフォワード指令と制御出力との偏差を入力しフィードバック操作量を出力するフィードバック補償器15と、フィードフォワード操作量とフィードバック操作量との和を入力し制御対象18に操作量を出力するホールダ17と、制御対象18の出力をサンプリングして制御出力を出力するサンプラ19と、を備えた2自由度ディジタル制御装置において、前置補償器10は、前置遅れ器11と前置フィルタ12とで構成する。
(もっと読む)
1 - 20 / 54
[ Back to top ]