
Fターム[5H115PA01]の内容
車両の電気的な推進・制動 (204,712) | 目的 (11,912) | 乗り心地改善 (2,285)
Fターム[5H115PA01]の下位に属するFターム
ノッチの切換回数減少 (6)
Fターム[5H115PA01]に分類される特許
2,261 - 2,279 / 2,279
車両用駆動装置の制御装置

【課題】 差動作用により変速機構として機能する差動機構と、その差動機構と駆動輪との間に自動変速機とを備える車両用駆動装置において、動力伝達経路が動力伝達遮断状態から動力伝達可能状態へ切り換えられる際のシフトショックを抑制する制御装置を提供する。
【解決手段】 シフト操作装置46が動力伝達遮断状態を選択する非駆動ポジションから動力伝達可能状態を選択する駆動ポジションへ切り換えられる際に、出力制御手段86により動力伝達経路を動力伝達可能状態に切り換えるために第1クラッチが係合され、その係合後に第1電動機M1および第2電動機M2を用いて差動部11からの出力トルクが連続的に徐々に立ち上がるように制御される。よって、第1クラッチの係合時は差動部11からの出力トルクが抑制された状態とされて、たとえ第1クラッチの油圧がファーストアプライされてもシフトショックが抑制される。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法

【課題】 内燃機関を安定して目標回転数で運転しながら内燃機関側の反力を用いて発電機から駆動軸に駆動力を出力する。
【解決手段】 遊星歯車機構を介して内燃機関と発電機と駆動軸とが接続されると共に駆動軸に電動機が接続された自動車において、電動機が駆動不能状態となったときには、内燃機関の目標回転数と現在の回転数との偏差に基づいてフィードバック制御における関係式により基本スロットル開度を設定し、発電機から内燃機関側に作用するトルクと内燃機関の回転数の今回値と前回値とに基づいて発電機からの負のトルクの変化により内燃機関側に作用するトルクの変動をキャンセルする補正開度を設定し、両者の和により目標スロットル開度を設定する。内燃機関の反力を用いて発電機から負のトルクを出力して駆動軸に正のトルクを出力する際の発電機の負のトルクの変化に迅速に対応でき、内燃機関を安定して目標回転数で運転できる。
(もっと読む)
移動体の制動装置
【課題】 電気ブレーキ制御装置と空気ブレーキ制御装置が並列に接続されたブレーキ装置において、滑走発生時のエネルギー効率を向上するとともに、減速力の低下を防止する。
【解決手段】 滑走検知信号SSが生じたとき、電気ブレーキ制御装置(電制)3と空気ブレーキ制御装置(空制)4のいずれか一方例えば空制4の減速力A4を保持しつつ、他方例えば電制3の減速力A3を、滑走検知毎に予定の減少率で低減し、滑走防止制御を行う。また、列車制御装置1からの総合減速力指令B0も、aづつ滑走検知毎にステップ状に低減させる。さらに、滑走が発生していない車輪のブレーキを独立して制御している空制4では、低減分aに見合う減速力の増加を行う。
(もっと読む)
ハイブリッド車両のエンジン始動時制御方法
【課題】EV走行中のエンジン始動時の加速ショックを低減する。
【解決手段】EV走行中ならば(ステップS10肯定)、実燃料噴射量Qfin、アクセル開度、車速等の走行情報を読み込み(S20)、仮想エンジン回転数NE0を算出し(S30)、当該回転数NE0とアクセル開度に基づいてガバナ特性マップから仮想燃料噴射量Qfin0を算出する(S40)。トルク換算マップを用い目標エンジントルクTEPnと実エンジントルクTETnを算出し、差分トルクΔTEnを算出する(S50)。エンジン始動指令時ならば(S60肯定)、始動直前のトルクTEP(n−1),TET(
n−1)から算出した差分トルクΔTE(n−1)を、始動時の差分トルクΔTEnとして
保持し(S70)、トルクアシスト量Tmgとする(S80)。エンジン始動時でないならば(S60否定)、現在の差分トルクΔTEnをそのままトルクアシスト量Tmgとする(S90、S80)。
(もっと読む)
車輌用燃料電池装置
【目的】 車輌用燃料電池装置の水除去処理の進行状況を利用者が把握できるようにする。
【構成】 車輌用燃料電池装置を停止させるときの水除去処理の進行状況を進行状況特定装置で特定し、特定した進行状況をディスプレイなどの出力装置へ出力する。これにより利用者へ水除去処理の進行状況を提示する。
(もっと読む)
電気自動車の制御装置
【課題】 車両状態によっては急発進加速可能な電気自動車の制御装置を提供する。
【解決手段】 アクセル開度に応じてトルク指令値を演算するトルク指令値演算手段(ステップS1〜S3)と、前記トルク指令値に応じて電動機の出力トルクを制御する電動機制御手段(12)と、急発進加速を必要とする車両状態を検出する車両状態検出手段(ステップS6)と、を備え、前記電動機制御手段(12)は、前記車両状態検出手段(ステップS6)により検出された車両状態が急発進加速を必要としない状態である場合にはトルク指令値に対して所定の遅延を生じさせて電動機3の出力トルクを制御し、検出された車両状態が急発進加速を必要とする場合にはトルク指令値に対して所定の遅延を生じさせることなく電動機3の出力トルクを制御するようにした。
(もっと読む)
動力出力装置および自動車並びに動力出力装置の制御方法
【課題】 内燃機関の運転に伴うこもり音の発生を抑制すると共にエネルギ効率の向上を図る。
【解決手段】 エンジンからの動力をプラネタリギヤと二つのモータMG1,MG2とによりトルク変換して駆動軸に出力して走行するハイブリッド自動車において、モータMG1の発電量Pchgに基づいてこもり音の発生を回避するエンジン22の動作ラインを設定し(S140)、この設定した動作ラインに基づいてエンジンとモータMG1,MG2を制御する(S150〜S200)。これにより、エンジンの運転に伴って生じ得るこもり音の発生を抑制すると共にできる限りエンジンを効率よく運転することができる。
(もっと読む)
冷却装置及びそれを搭載した車両
【課題】 冷房を機能させながら冷房用冷媒の冷却能力を利用して動力源の冷却の負荷を低減することができる。
【解決手段】 冷房用冷媒冷却器50には、一定運転条件下で冷房用冷媒(二酸化炭素)が外気温近傍となる位置にバイパス流路61が接続され、このバイパス流路61には燃料電池スタック20を冷却する冷却水と熱交換を行う熱交換器62が接続されている。バイパス流路61の接続部分には、冷房用冷媒冷却器50を通過する冷房用冷媒が熱交換器62に流通するか、流通しないかを切り替える切替バルブ64が配設されている。そして、冷却用コントローラ60は、バイパス流路61の接続部分の冷房用冷媒の温度が外気温近傍であるときに冷房用冷媒冷却器50の冷却能力に余力があると判定し、熱交換器62により燃料電池スタック20の冷却水と冷房用冷媒との間で熱交換を行うように切替バルブ64を制御する。
(もっと読む)
圧縮機制御装置
【課題】 燃料電池を発電させるために大型の圧縮機を車両に搭載しても、車両内での静粛性を得る。
【解決手段】 空気が供給されて発電する燃料電池1と、二次電池5と、燃料電池1及び二次電池5から電力供給を受けて駆動する駆動モータ8を備えた車両に搭載され、当該車両が走行するために要求される燃料電池1の発電電力に応じて燃料電池1に空気を供給する圧縮機4の回転数を制御する。コントローラ2は、圧縮機4の回転数を制御するに際して、モータ回転センサ12の検出値から車速を検出すると共に、二次電池5の充電量を検出し、車速及び充電量に基づいて圧縮機4の回転数の上限を設定し、当該上限を超えないように圧縮機4の回転数を制御する。
(もっと読む)
電動車両駆動制御装置及び電動車両駆動制御方法
【課題】駆動モータを駆動して、車両要求トルクに対して出力トルクが過不足する分を確実に補い、車両駆動装置に振動が発生するのを抑制する。
【解決手段】発電機目標トルクTG* を算出する発電機目標トルク算出処理手段と、発電機のイナーシャトルクTGIに基づいて、イナーシャ補正トルクを算出するイナーシャ補正トルク算出処理手段と、算出されたイナーシャ補正トルクに基づいて駆動モータ目標トルクを発生させる駆動モータ目標トルク発生処理手段と、イナーシャ補正トルクによる出力トルクの変動を表す出力トルク変動指標に基づいて出力トルクを補正するダンピングトルク補正処理手段とを有する。イナーシャ補正トルクが算出され、出力トルクが補正されるので、車両要求トルクTO* に対して出力トルクが過不足する分を確実に補うことができる。
(もっと読む)
ハイブリッド車両の制動装置およびハイブリッド車両の負圧蓄圧制御装置
【課題】 ハイブリッド車両の制動装置において、効率よく負圧を蓄圧し、かつ確実かつ安定的に負圧を提供する。
【解決手段】 ハイブリッド車両の制動装置は、エンジン11の駆動に伴って発生される負圧を蓄圧し、この負圧によって運転者のブレーキ踏力を助勢する負圧式ブースタ34を有する液圧ブレーキ装置Aと、負圧式ブースタ34に蓄圧されている負圧を検出する負圧計38と、車両の加速状態を検出するアクセル開度センサ25および車両速度を検出する車輪速度センサ26〜29と、これらアクセル開度センサ25および車輪速度センサ26〜29によって検出された車両の動作状態に応じてエンジン11が駆動される際に、負圧式ブースタ34に蓄圧されている負圧が低下している場合には、負圧の蓄圧を優先するようにエンジン11を制御するハイブリッドECU23とを備えている。
(もっと読む)
車両情報表示装置及び、情報表示方法
ハイブリッド電気自動車用の車両情報表示装置が提供される。表示装置は、エンジン・アイコン、モーター・アイコン、バッテリー・アイコン及び車両駆動輪・アイコンを含む。車両運転者に車両の作動状態に関する情報を提供するため、種々のアイコン間のパワーフロー表示器が、対応する車両の構成要素の間のパワーフローの方向及び大きさを示すために、使用される。 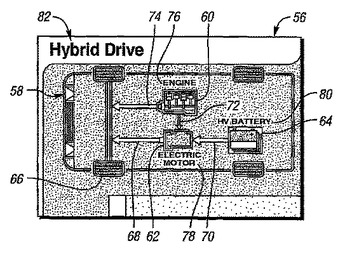 (もっと読む)
(もっと読む)
不安定走行装置
【課題】 従来の不安定走行装置においては、車両本体に乗った人が手足を自由に動かすことができず、限られた範囲内の手足、身体の移動によってのみ車両の前進走行、後進走行、左右旋回、加速・減速、制動等の操縦を行うことができるに過ぎない。
【解決手段】 平行に配置された2つの車輪2L,2Rと、その2つの車輪の回転により走行する車両本体3と、その車両本体に取り付けられると共に2つの車輪を回転駆動する2つの車輪駆動ユニット4L,4Rと、2つの車輪の車軸方向Xと直交する走行方向Yに延在され且つ車両本体に回動自在に支持されるシャーシ軸5と、そのシャーシ軸に固定されると共に運転操作者の左右の足が個別に置かれる一対の搭乗デッキ6L,6Rと、その一対の搭乗デッキの走行方向の傾き角度を検出するジャイロセンサ7と、一対の搭乗デッキの車軸方向の傾き角度を検出する回転角検出器8と、ジャイロセンサ及び回転角検出器により検出される一対の搭乗デッキの姿勢に応じて2つの車輪駆動ユニットに制御信号を出力して走行状態を制御する制御装置10と、を設ける。
(もっと読む)
回転電機及び電動車両
運転中でも出力特性を容易に自由に調節変更することができる回転電機。この回転電機は、電動二輪車(100)のハウジング(123)内に収納される。回転軸(230)は車軸(210)を構成するようにして、ロータ(220)に接続する。ロータ(220)に対向してステータ(240)を配置する。可動部材(260)は、調整用モータ(280)により回転軸(230)まわりに回転する回転部材(270)に接続する。また、可動部材(260)は、回転部材(270)の回転により回転軸(230)の軸方向に移動する。この移動によりロータ(220)は回転軸(230)の軸方向に回転自在に移動して、ステータ(240)との相対位置が変化する。 (もっと読む)
ハイブリッド車両の駆動部を制御する方法
内燃機関(10)及び電動モータ(24)を備える自動車の駆動部を制御する方法が開示されている。主変速装置(16)は、自動車の駆動軸(19)に接続された出力軸(18)と、内燃機関(10)に接続された入力軸(14)とを備える。電動モータ(24)は、少なくとも二つの変速段を含む中間変速装置(22)を介して、主変速装置(16)の入力軸(14)又は出力軸(16)に結合されている。本発明によれば、自動車は、自動車を停止状態から加速するために、最初は、もっぱら電動モータ(24)によって駆動され、中間変速装置(22)は、その最低変速段にある。内燃機関(10)は、中間変速装置におけるシフト操作の前に駆動機能を受け継ぐ。中間変速装置は、好ましくは、ドグクラッチ変速装置として具体化されている。本発明は、自動車、特に乗用車に適用される。  (もっと読む)
(もっと読む)
ハイブリッド自動車
【課題】バッテリの残容量SOCを適切な状態に管理してハイブリッド自動車の走行性能を十分に発揮する。
【解決手段】モータからの動力だけで走行するモータ走行モードと、エンジンからの動力を使用して走行する他の走行モードとを選択する際に用いるモータ走行モード判定用マップにおけるモータ走行モードの範囲をモータに電力供給するバッテリの残容量SOCが適正値となるように更新可能とする。これにより、バッテリの残容量SOCをより適切な状態に維持でき、ハイブリッド自動車の走行性能を十分に発揮することができる。
(もっと読む)
自動車のブレーキシステムをコントロールするための方法
1つの電気回生ブレーキ、特に1つの発電機(4)と、ブレーキ媒体(B)を介して少なくとも1つのブレーキ圧発生手段によって駆動される多数の油圧摩擦ブレーキ(2)とを備え、ブレーキシステムの減速全体が、摩擦ブレーキ(2)と電気回生ブレーキとの減速割合から成る、自動車のブレーキシステム(1)のための方法では、できるだけ高いブレーキの快適さが可能にされるべきである。このため、本発明によれば、電気回生ブレーキによるブレーキングの際に、ブレーキ媒体(B)をアキュムレータ(12)内へと排出する。 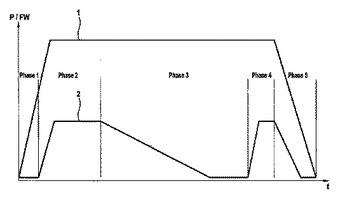 (もっと読む)
(もっと読む)
移動用電動車両
【課題】 脚に障害を持つ人や脚力の衰えが見える高齢者が使用する移動用電動車両であって、搭乗者が脚を用いて駆動力を発生させる機能を有することによって機能回復訓練に効果を発揮するとともに、チェーンやギヤ等のトルク伝達機構を排除することによってその機構が簡単化されかつ重量が軽減され、そのうえ操縦が容易でかつ乗心地のよい移動用電動車両を提供することを目的とする。
【解決手段】 搭乗者が脚で操作するペダルと、前記ペダルに設けられたペダルの回転角度を検出するセンサと、車両の駆動輪に駆動力を与える駆動手段と、駆動手段を制御する制御手段とを備え、前記制御手段は前記センサの検出信号に基づいて演算した駆動輪の回転角度および回転速度の指令値を前記駆動手段に出力して駆動手段を制御することを特徴としている。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
2,261 - 2,279 / 2,279
[ Back to top ]