
Fターム[5H115QE06]の内容
車両の電気的な推進・制動 (204,712) | 制御時の状態 (7,652) | 降坂時 (172)
Fターム[5H115QE06]に分類される特許
1 - 20 / 172
車両のブレーキシステム
【課題】非協調ブレーキシステムにおいて、回生ブレーキの利用によりエネルギの有効利用を図りつつ、運転者がブレーキ操作時に違和感を覚えることを常に防止する。
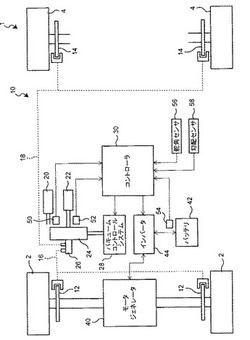
【解決手段】回生ブレーキ手段40による回生制動力を制御する回生ブレーキ制御手段を、ブレーキ操作手段22の制動操作開始時のストローク変化が検出されたときに回生ブレーキ手段40を制御する第1期間制御手段と、該第1期間制御手段に続いて回生ブレーキ手段40の制御を行う第2期間制御手段とで構成し、前記第1期間制御手段により、ブレーキ操作検出手段52により検出される制動力増大方向のストローク変化が大きいほど回生制動力が大きくなるように回生ブレーキ手段40を制御し、前記第2期間制御手段により、蓄電手段42の残容量が所定値Y以上であるとき、前記第1期間制御手段による制御時に比べて回生制動力が減少するように回生ブレーキ手段40を制御する。
(もっと読む)
車両

【課題】モータジェネレータの回転速度を制限する。
【解決手段】車両は、運転者が操作するスイッチと、スイッチが操作されると停止するエンジンと、モータジェネレータと、エンジン回転速度がゼロから増大するとモータジェネレータの回転速度が減少するようにエンジンの出力軸とモータジェネレータの出力軸とを連結する動力分割装置と、スイッチを操作することによってスイッチエンジンが停止した状態でモータジェネレータの回転速度が増大した場合、エンジン回転速度がゼロから増大するように制御するECUとを備える。
(もっと読む)
運転支援装置
【課題】下り勾配区間におけるモータの回生損失の低減を図る。
【解決手段】搭載車両の走行先に、当該搭載車両を停車位置に一時停止させるためのブレーキ操作を必要とする下り勾配区間が存在すると判定した場合、搭載車両の位置から停車位置までの区間において、平坦区間を走行する際に行われるブレーキ操作でモータの回生損失が発生するか否かを判定し、モータの回生損失が発生すると判定された場合、平坦区間を走行する際に行われるブレーキ操作の操作開始位置より手前でブレーキ操作を開始するように運転者に案内する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】定速走行制御下における燃費性能の改善を図ると共に、高度な安全性を有するハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車(1)の制御装置(26)は、走行路面の勾配情報を取得する手段(17)と、走行速度を検出する手段(16)と、車間距離を検出する手段(18)と、走行路面が下り勾配を有する場合に、下り勾配の最下地点bより手前側に設定された惰性走行開始地点aから惰性走行を開始し、車間距離が所定車間距離L1未満となった場合に前記惰性走行を中止する制御手段(26)とを備える。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】定速走行制御下における内燃機関の燃料消費量を惰性走行により削減することにより、良好なドライバビリティを確保しつつ、燃費性能を向上可能なハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車の制御装置は、走行路面の勾配情報を取得する手段(17)と、走行速度を検出する走行速度検出手段(16)と、取得した勾配情報に基づいて走行路面が上り勾配を有すると判定された場合に、当該上り勾配の頂上地点における走行速度が定速走行制御において許容される走行速度の下限値として予め設定された設定速度下限値となるように算出された惰性走行開始地点aから惰性走行を開始し、走行速度が設定速度Vsetより大きくなった場合に、惰性走行を中止すると共に、電動機(4)を回生制動させる制御手段(26)とを備えた。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】良好な燃費性能を維持しつつ、電動機の温度上昇を防止することが可能なハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車(1)は、内燃機関(2)と電動機(4)の動力で走行し、制御装置(26)によって車速が設定速度VSに維持されるように定速走行制御されている。制御装置(26)は特に、勾配情報を取得する勾配情報取得手段(17)と、走行路面が降坂である場合に、第1の制動力P_req_r、第2の制動力P_soc_r及び第3の制動力P_maxのうち、最小の制動力が電動機(4)から出力されるように制御する制御手段(26)とを備える。
(もっと読む)
電気自動車の制御装置
【課題】バッテリの長寿命化と充電効率の改善を好適に実現可能な電気自動車の制御装置を提供する。
【解決手段】本発明の電気自動車(1)は、バッテリ(11)の充電電力で力行駆動する電動機(4)を搭載し、下り勾配を走行する際に電動機を回生駆動させてバッテリに充電を行う。その制御装置は、走行路面の勾配情報を取得する手段(17)と、バッテリ(11)の充電量を検出する手段(15)と、勾配継続距離を走行した際にバッテリの充電量が上限充電量となるように、下り勾配を走行中の電動機(4)の回生量を設定する制御手段(26)とを備えたことを特徴とする。
(もっと読む)
電気自動車の電源制御装置
【課題】車両の走行状態に応じて適切な電源を選択し、効率よく電動機の電源を使用することができるとともに、バッテリの劣化を防ぐことのできる電気自動車の電源制御装置を提供すること。
【解決手段】車両1が連続登降坂路に突入している場合(S2)の充電時(S4)においては、キャパシタ充電率が上限値に達していない限り(S5)、電動機6の電源として電源選択部22によりキャパシタ20を選択することで、当該キャパシタに優先的に充電を行う(S6)。
(もっと読む)
車両用駆動システム
【課題】モータ走行時における燃費を向上できる車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、エンジン2と、モータ6と、入力軸41および出力軸42の間の変速比を変更できる変速機4と、エンジン2および変速機4の入力軸41の間に配置されるクラッチ3と、モータ6の接続先を変速機4の入力軸41および出力軸42の間で切り替える接続切替装置7と、接続切替装置7を駆動制御する制御装置9とを備える。また、車両用駆動システム1は、エンジン2を動力源とするエンジン走行と、モータ6を動力源とするモータ走行とを切り替え得る。そして、制御装置9は、モータ走行中におけるアクセル開度θが所定の条件を満たすときに、接続切替装置7を駆動制御してモータ6の接続先を変速機4の入力軸41および出力軸42の間で切り替える。
(もっと読む)
電動車の走行制御装置、および電動車
【課題】離席時制御による安全性向上を図りつつ、誤って離席が検知された場合に確実に車両を停止させることができる走行制御装置および電動車を提供する。
【解決手段】本発明に係る走行制御装置10は、目標速度を指令するための速度指令手段6と、車両速度を検知する速度検知部12と、車両速度が目標速度に一致するように走行用モータ17を制御する制御部11とを備えた走行制御装置において、オペレータが離席しているか否かを検知する離席検知部9と、走行路が坂路であるか否かを検知する坂路検知部13とをさらに備え、制御部11は、オペレータが離席していること、および走行路が坂路であることが検知された場合は目標速度をゼロとし、オペレータが離席していること、および走行路が坂路ではないことが検知された場合は目標速度を予め定められた微小速度として走行用モータ17を制御する。
(もっと読む)
車両制御装置
【課題】下り勾配路途中で停止する場合でも回生エネルギを高効率に回収できる車両制御装置を提供することを課題とする。
【解決手段】勾配路情報から予測される回生エネルギ量に応じて下り勾配路走行前に車両でエネルギを消費する機器を駆動制御する車両制御装置であって、下り勾配路途中での車両の停止情報を取得する停止情報取得手段と、その停止情報に基づいて下り勾配路途中で車両が停止すると判断した場合、下り勾配路途中での車両の停止に応じて回収可能と予測される回生エネルギ量と下り勾配路途中での停止時間中に車両で消費すると予測されるエネルギ量の少なくとも一方に基づいて下り勾配路走行前にバッテリで消費する電力量を決定し、その電力量を消費するように車両の機器を駆動制御する制御手段とを備えることを特徴とする。
(もっと読む)
車両
【課題】1つの駆動源を用いて駆動タイヤとサスペンションのそれぞれを作動させることができる車両。
【解決手段】駆動源8と、駆動源8から出力される駆動力によって回転可能な駆動輪3と、駆動源8から出力される駆動力によって作動するサスペンション7と、駆動源8と、駆動輪3またはサスペンション7との接続を切り替える切替え手段23とを有する走行装置4を備える車両を提供する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの始動停止の頻度を低減することにより、乗員に与える違和感を低減する。
【解決手段】統合コントローラ10は、アクセル開度APOが予め設定されたエンジン停止判定値APO1以下であることをアクセルオフとして判定し、このアクセルオフの判定タイミングを起点としてエンジン停止開始タイミングを設定する。この場合、統合コントローラ10は、勾配路であると判定された場合に設定するエンジン停止開始タイミングを、勾配路でないと判定された場合に設定するエンジン停止開始タイミングよりも遅くしている。
(もっと読む)
車両用回生制動制御装置
【課題】運転者に対するブレーキ感または制動感のばらつきを低減できる車両用回生制動制御装置を提供することを目的とする。
【解決手段】車両が平坦路を走行していると判定したときに車両の加速度に基づいて走行抵抗を算出し、この算出した走行抵抗に基づいて車両の平坦路走行時の回生制動力を算出し、この算出した回生制動力に基づき電動機2の回生制動力を制御する制御部4を備え、制御部4は、算出した平坦路走行時の回生制動力に基づいて、車両が登坂走行している際の電動機2の回生制動力、または、降坂走行している際の電動機2の回生制動力を制御する。
(もっと読む)
車両用モータトルク制御装置
【課題】必要なクリープトルクを確保しながら、不要なクリープトルクの削減によりモータの電力消費を適切に抑制させることができる車両用モータトルク制御装置を提供する。
【解決手段】制御手段は、車速検出手段24,ブレーキ操作検出手段22の検出情報に基づいて、電動モータ2を制御してクリープトルクを発生させ、クリープトルクの発生時にブレーキ操作があればクリープトルクを所定のレベルで低下させ、クリープトルクの発生時にブレーキ操作がなければ、検出車速に基づいてクリープトルクを所定の範囲で増減させ、前記所定量は前記所定のレベル範囲の最大低下レベルよりも大きな低下レベルとする。
(もっと読む)
運転支援装置
【課題】走行計画を立案することなく、かつ、燃費向上効果の向上を図る。
【解決手段】車両の走行先に存在する予め定められた領域における道路状況、現在の車両状況および過去の操作状況の少なくとも1つに関する情報を取得し、これらの情報に基づいて車両の走行先で車両の燃費の悪化を招くことになるか否かを予測し、車両の燃費の悪化を招くことになると予測された場合、車両の燃費を向上するための操作が車両の乗員に事前に報知する。
(もっと読む)
電動車両のピッチング制御装置
【課題】車両の制動時におけるピッチング運動による姿勢変化の抑制のために、車両の制動力を適切に制御することで車両停止の瞬間に起こる減速度の不連続を防止し、車両のピッチング運動を良好に制御し、かつ路面勾配による走行抵抗の大幅な変化や、運転者や積荷の増減により車両重量に大幅な変化があっても乗員の乗り心地を確保しつつ操縦安定性を高めることのできる電動車両のピッチング制御装置を提供する。
【解決手段】電動車両のピッチング運動によって生じる電動車両の姿勢変化を抑制する制御を行う電動車両のピッチング制御装置において、電動車両が停止時に、電動車両を駆動する駆動用モータに対して出力される制駆動トルクが、勾配を有する路面に対して電動車両が停止状態を保つために必要な力を駆動用モータのトルクに換算した値である走行抵抗相当トルクとなるように制御を行うことを特徴とする電動車両のピッチング制御装置。
(もっと読む)
車両の制御装置
【課題】走行抵抗が急低下したとき、加速度の急変を抑えつつ、ドライバの意図に合致した駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】電気自動車1は、アクセル開度センサ7と、走行抵抗演算部12と、走行抵抗急低下判断部14aと、単調増加変数演算部13cと、電子コントロールユニット5と、を備えた。走行抵抗演算部12は、車両走行中、外乱による走行抵抗推定値FDを検出する。走行抵抗急低下判断部14aは、車両走行中、走行抵抗の急低下を検出する。単調増加変数演算部13cは、走行抵抗の急低下を検出したとき、アクセル開度に基づいて車両駆動力の単調増加変数を設定する。電子コントロールユニット5は、単調増加変数と走行抵抗推定値FDに基づいて目標車両駆動力を設定し、タイヤへ加える駆動力抑制により、実車両駆動力を前記目標車両駆動力に収束させる制御を行う。
(もっと読む)
車両用電動発電機の制御装置
【課題】界磁巻線の発熱量を抑制し界磁巻線の焼損が防止できるとともに、車両減速エネルギーによる回生発電電力の回収効率が向上する
【解決手段】この発明による車両用電動発電機は、交流側が電動発電機の電機子巻線に接続され直流側が降圧コンバータを介して前記二次電池に接続されたインバータユニットと、降圧コンバータとインバータユニットとの間に接続され、二次電池よりも定格充放電電力が大きくかつ蓄電容量が少ないキャパシタと、インバータユニットを制御すると共に電動発電機の界磁電流を制御し、電動発電機を電動機若しくは発電機として動作させる制御回路とを備え、第1の所定時間毎の界磁巻線への供給電力量を算出し、界磁巻線への供給電力量が所定値を超過した場合は第2の所定時間の間、界磁巻線に流す界磁電流値を第1の所定値に制限し、第2の所定時間経過後に界磁電流の制限値を第1の所定値より大きい第2の所定値に制限する。
(もっと読む)
駆動制御装置
【課題】例えばハイブリッド車両等に搭載される駆動制御装置において、回生によるエネルギーの回収効率を向上させる。
【解決手段】駆動制御装置は、車両(10)に搭載され、駆動軸(50)の動力を回生可能な回転電機(MG1)と、駆動軸から回転電機への動力伝達の遮断を実行可能な遮断手段(400)と、信号情報を取得する取得手段(110)と、取得手段によって取得された信号情報に基づいて、駆動軸の回転数が減少するか否かを予測する予測手段(120)と、予測手段によって回転数が減少すると予測される場合、動力伝達の遮断が解除されるように、遮断手段を制御する制御手段(130)とを備える。
(もっと読む)
1 - 20 / 172
[ Back to top ]