
Fターム[5H115QI02]の内容
車両の電気的な推進・制動 (204,712) | 制動、停止 (3,697) | 制動の種類 (3,172) | 電気制動 (2,522)
Fターム[5H115QI02]の下位に属するFターム
Fターム[5H115QI02]に分類される特許
21 - 39 / 39
車両用制動力制御装置

【課題】車両用制動力制御装置において、制動力の変化による車両の操縦性が変化することを、運転者が違和感なく体感することを可能とし、安定した車両制御の実現に貢献することにある。
【解決手段】制御手段は、判定手段により障害物との接触のおそれがなくなったと判定された場合には、自動制動作動手段による自動制動を解除し、且つこの自動制動の解除時における車両の減速度が予め設定された減速度よりも高いときには、警報指令信号を出力する警報指令手段を備えている。
(もっと読む)
車両の制駆動制御装置

【課題】推定した摩擦係数の誤差を補償できる制駆動制御装置を提供する。
【解決手段】制御装置10は、カメラ20の撮像した画像に基づいて摩擦係数を特定し、その摩擦係数に基づいて、最大制駆動力を推定する。また、制御装置10は、スリップ率が所定の閾値を超えたか否かを判定する。制御装置10は、スリップ率が閾値を超えないときは、最大制駆動力を越えない範囲で、運転者の要求駆動力に応じて目標制駆動力を算出し、スリップ率が閾値を超えたときは、目標制駆動力を0にする。
(もっと読む)
4輪駆動車の制御装置
【課題】界磁電流を速やかに低減してモータの迅速な停止を実現し、次制御動作への移行時間を短縮することを課題とする。
【解決手段】エンジン15で前輪12,13が駆動され、発電機23で得られた電力で動作するモータ20で後輪18,19が駆動され、モータ20と後輪18,19との間に設けられた電磁クラッチ22を介して後輪18,19が選択的に駆動される4輪駆動車100の走行を制御する4輪駆動車の制御装置において、モータ20を停止する際に、界磁電流消費装置25によってモータ20の界磁電流を強制的に放電させて消費するように構成される。
(もっと読む)
ハイブリッド車両、ハイブリッド車両の制御方法およびハイブリッド車両の制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体
【課題】登坂路において車両のずり下がり発生時に車両駆動力を確実に確保可能なハイブリッド車両を提供する。
【解決手段】HV−ECUは、走行中の道路勾配がしきい値よりも大きいとき、エンジンが停止していればエンジンを始動させる(S50)。そして、HV−ECUは、車両のずり下がりが発生していると判定すると(S60にてYES)、エンジンの動作点を変更し、エンジンから駆動軸へ出力されるエンジン直行トルクを増加させる(S70)。さらに、HV−ECUは、モータジェネレータMG2の回生トルクが減少するようにモータジェネレータMG1,MG2の動作点を決定する(S80)。
(もっと読む)
車両およびその制御方法
【課題】駆動輪に連結された駆動軸にロータが接続されたモータを備える車両において、車両のずり下がりによる移動距離を低減する。
【解決手段】車両がずり下がりを生じていると判定されたときに(S150)、要求トルクTd*の絶対値が車重Mと路面勾配αとに基づく車重分力Fmの絶対値以下のときには、(S180,S190)、回転制限処理用回転位置θestを用いてモータのステータに形成される磁界の向きが固定されるようモータを制御する(S230)。これにより、ロータが回転しないようにすることができ、車両を停止させることができる。
(もっと読む)
車両およびその制御方法
【課題】簡易な構成によりスリップを抑制すると共に複数の装置によりスリップを抑制し、スリップによる不安定な走行や機器の破損などを抑制する。
【解決手段】走行に用いられたモータトルクやブレーキトルクと回転位置検出センサ23からのモータ22の回転数だけを用いて駆動輪34a,34bに生じた空転による所定のスリップを判定し、所定のスリップが判定されているときにはモータ22の駆動制限によりスリップを抑制する。これにより、簡易な構成によりスリップを抑制することができる。また、ブレーキシステム40によってもスリップを抑制するから、複数の装置によりスリップを抑制することができ、ブレーキシステム40が何らかの故障や異常により作動しないときやTRCオフスイッチ68がオンされて作動しないときでもモータ22の駆動制限によりスリップを抑制するから、不安定な走行や機器の破損などを抑制することができる。
(もっと読む)
車線追従制御装置およびこれを搭載した自動車
【課題】
車線追従制御装置作動中のドライバによる車線変更操作時に、違和感を感じさせないように適切なタイミングで車線追従制御動作を解除し、かつ車線変更時における車両走行安定性を確保する。
【解決手段】
車線追従制御装置1において、操舵角δを取得し当該操舵角の時間変化状態が所定条件に該当するか否かを検出し、当該操舵角の時間変化状態が車線変更操作によるものか否かを判断する運転モード判断部11と、運転モード判断部11が操舵角の時間変化状態が車線変更操作によらないものと判断したときは車線追従制御用の目標ヨーレートγcを生成し、運転モード判断部11が前記操舵角の時間変化状態が車線変更操作によるものと判断したきは車線変更制御用の目標ヨーレートγδを生成する制御部12と、少なくとも制御部12により取得した目標ヨーレートを制御パラメータとする車両制御信号Mを生成する車両運転制御部13とを備える。
(もっと読む)
列車制御システム
【課題】空転・滑走の発生を効果的に抑制できる列車制御システムを提供する。
【解決手段】車両の速度制御を行う列車制御システムであって、各車軸への加減速指令を算出する加減速指令算出手段11と、加減速指令算出手段からの加減速指令と、自身で判定した空転・滑走検出結果に基づいて、駆動・制動装置を制御する駆動・制動装置制御手段12A,12B,12Cと、空転・滑走が起こりやすい車軸若しくは空転・滑走が起こっている車軸を判定する空転・滑走軸判定手段13とを備え、空転・滑走軸判定手段が空転・滑走が起こりやすい車軸若しくは空転・滑走が起こっている車軸を判定した時に、加減速指令算出手段が各車軸へ個別の加減速指令を指令するようにした。
(もっと読む)
全車輪が各々少なくとも1つの回転電気機械に連結されている車両の制動システムの低電圧給電段のための冗長度ハードウェア設計思想
本発明は、道路車両用の電気制動システムであって、道路車両の少なくとも2つの車輪(1)が各々、少なくとも1つの回転電気機械(2)に回転可能に連結され、少なくとも1つの電子車輪制御モジュール(23)が、一車輪の回転電気機械を制御し、各電子車輪制御モジュールにより、大きさ及び符号が定められた制御トルクを問題の車輪に選択的に加えることができ、電気制動システムは、少なくとも2つのサブシステム(A,B)を有し、各サブシステムは、電子車輪制御モジュール(23)のうちの少なくとも1つと、中央電線路と、電力要素を制御するために用いられる電子装置に電力を供給する低電圧給電段とを有し、低電圧給電段は、第1の低電圧電源及び第2の低電圧電源を有し、第1の低電圧電源と第2の低電圧電源は、第1の部分(43A)及び第2の部分(43B)を有する低電圧電線路(43)によって互いに接続され、第1の部分(43A)と第2の部分(43B)は、2つの部分を電気的に分離する装置(430)によって相互に接続され、装置(430)は、2つの部分のうちの一方が不足電圧又は過電流を受けた場合に要望に応じて相互接続を中断することができる電気制動システムに関する。サブシステムのうちの一方(A)の各電子車輪制御モジュール(23)は、第1の部分によって給電され、サブシステムのうちの他方(B)の各電子車輪制御モジュール(23)は、第2の部分によって給電される、電気制動システム。 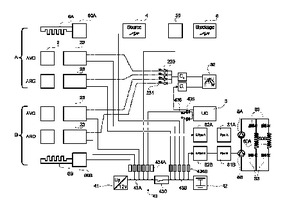 (もっと読む)
(もっと読む)
ハイブリッド駆動機構を備えた自動車の駆動方法
本発明はハイブリッド駆動機構(10)、すなわち、駆動機構として内燃機関(11)と少なくとも1つのモータ(12)とを備えた自動車の駆動方法に関する。本発明によれば、負のドライブトレイン目標トルクを達成するために、モータ(12)により負のドライブトレイントルク(M_soll)が形成され、内燃機関(11)が慣性走行モード以外のモードで駆動される。  (もっと読む)
(もっと読む)
ハイブリッド車およびその制御方法
【課題】アクセルオフして走行する際の減速フィーリングを良好にする。
【解決手段】エンジンの出力軸に遊星歯車機構を介して駆動軸が接続されると共に遊星歯車機構の他の回転要素に二つのモータが各々接続された車両において、アクセルオフして走行する際には、シフトポジションSPと車速Vとに基づいて駆動軸への仮要求制動トルクTrtmpとエンジンの仮目標回転数Netmpとを設定すると共に路面勾配θと車速Vとに基づいて補正係数α1,α2を設定し、設定した補正係数α1,α2を仮要求制動トルクTrtmpとエンジンの仮目標回転数Netmpに乗じて要求制動トルクTr*とエンジンの目標回転数Ne*とを設定する(S110〜S160)。そして、エンジンを燃料カットして目標回転数Ne*でエンジンが回転すると共に要求制動トルクTr*が駆動軸に出力されるよう制御する。これにより、路面勾配θに拘わらず減速フィーリングを良好にできる。
(もっと読む)
車両の制御装置
【課題】車体のロール状態を制御する際に、要求される車両の走行状態を維持しつつ、制御のために出力されるトルクが不足してしまうことを回避して、車体のロール状態を適切に制御できる制御装置を提供する。
【解決手段】車輪に付与する駆動トルクおよび制動トルクを算出する制駆動力算出手段と、算出された駆動トルクおよび制動トルクを出力する制駆動力出力手段と、車体のロールを検出するロール検出手段と、車体のロール状態に基づいて駆動トルクおよび制動トルクを配分して出力することでロール状態を制御するロール制御手段とを備えた車両の制御装置において、ロール制御手段によるロール状態の制御が実行される場合に、車輪に付与するトルクが制駆動力出力手段の最大出力トルク以下となるように駆動トルクおよび制動トルクを制御する制駆動力制御手段(ステップS5〜S12)を備えている。
(もっと読む)
車両用駆動制御装置
【課題】電動機が惰性回転するときの音を車両が停止するまでに低減させると共に、電動機の温度上昇を最小限に抑制する。
【解決手段】電動モータ3による車輪駆動が停止され且つ電磁クラッチ11で動力の伝達が遮断された場合(ステップS1の判定が“Yes”)、車輪の回転が停止するときに電動機の惰性回転が停止するように、電動モータ3にモータブレーキをかける。すなわち、後輪1RL・1RRの回転よりも電動モータ3の惰性回転の方が、回転速度が速いときに、車輪の回転が停止した後も電動モータ3の惰性回転が続くと推定し(ステップS6の判定が“Yes”)、インバータ9による三相短絡によって電動モータ3にモータブレーキをかける(ステップS11)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 ブラシレスモータのセンサレス制御において、電磁騒音を低減すると共に信頼性を向上することができるハイブリッド車両の制御装置を提供する。
【解決手段】 バッテリ14から電源供給を受け走行駆動又はエンジン11の走行駆動を補助するモータ12を備えたハイブリッド車両の制御装置において、モータ12の誘起電圧に基づきロータ位置を検出してセンサレス制御を行うセンサレス制御手段と、モータ12の回転数が所定回転数より低い車両制動時に前記モータ12の2相短絡制御又は3相短絡制御を実施してモータの回転を停止させる制動手段と、エンジンの再始動時にモータ12を強制転流により起動させる始動手段とを備えたことを特徴とする。
(もっと読む)
盗難防止機能を有する電動車両
【課題】盗難をより良好に防止することができる盗難防止機能を有する電動車両を提供する。
【解決手段】電動車両が、盗難を防止するための盗難防止制御が行なわれている盗難防止状態において移動された場合、その旨のトリガ信号がトリガ手段14から出力されたことを検出した車両制御器10は、スピーカ15から警報のための音声を発する音声制御、および、表示器16に警報のための表示を行う表示制御などの、警報を発するための警報制御の他、蓄電装置2から電動機1に供給する電力を制限する通電制限制御、蓄電装置2に電力を回生させる電力回生制動制御、電動機1の結線を短絡させる短絡制動制御、電動機1の回転速度の目標値を零に設定する零速度制御などの、電動車両の移動を困難にするための制動制御を行なう。
(もっと読む)
電気車の走行制御装置
【課題】 運転士の運転の仕方、運転の力量に関係なく、通常走行中に車内で人がよろけず良い乗り心地を保つことを可能とした電気車の走行制御装置を提供する。
【解決手段】 電気車に加速度検知器付走行指令装置5を取り付け、時間に対する加速度変化の増減の制限値を持ち、加速度変化が増加の上限を超えた場合には主電動機4を制御するインバータ装置3に対して加速度の変化を抑制するよう加速度制限信号を与え、加速度変化が減少の下限を下回った場合にはブレーキ制御装置2と主電動機4を制御するインバータ装置3に対して加速度の変化を抑制するよう加速度制限信号を与える。これにより、電気車の走行する加速度を一定範囲に保ち、立っている乗客が進行方向に姿勢をくずしにくい乗り心地を保つことができる。
(もっと読む)
緊急時電車脱線防止装置
【課題】 この発明は地震等の緊急時に電車の脱線を防止し、安全に停車させるための装置である。
【解決手段】 車軸に巻いたコイルに通電することにより車輪を磁化し、レールに固着させて脱線を防止する。コイルの芯となる円筒は台車に固定するので、車軸とは接触しない。緊急時以外は従来通りの走行が可能である。
(もっと読む)
車両の制駆動力制御装置
【課題】 車輪の駆動力を制御して、フラッタやハーシュネスの発生を抑制する。
【解決手段】 制駆動力制御装置は、左右前後輪Wfl,Wfr,Wrl,Wrrをそれぞれ駆動する電動モータ11a〜11d、コントローラ22(制駆動力制御手段)、および前後加速度センサ21a,21b(前後加振力検出手段)を備える。コントローラ22は、検出された各前輪の前後加速度に応じて、車輪に付加すべき駆動力または制動力を計算する。車輪に発生した前方向の加振力に対しては、同加振力と同じ大きさの制動力を走行時の駆動力に付加し、車輪に発生した後方向の加振力に対しては、同加振力と同じ大きさの駆動力を走行時の駆動力に付加することにより、同加振力を低減してフラッタの発生が抑制される。前後加速度センサ21c,21dを設け、後輪の前後方向の加振力をそれぞれ低減することにより、各車輪毎のハーシュネスの発生も抑制可能である。
(もっと読む)
電気変速機を有する動力分岐付き無段変速トランスミッション
本発明は、構成要素が熱エンジン(130)を車両の駆動車輪(133)へ並列に連結する2つの動力経路の間に配分され、上記構成要素は少なくとも3つのエピサイクロイド歯車装置(137、138、141、142)と、2つの電気機械(131、132)と、少なくとも1つの減速装置(136、139、140、143)とを含み、制御手段がトランスミッションの動作モードに応じて2つの動力経路の間に動力を異なって配分する、少なくとも2動作モードを有する動力分岐付き無段変速トランスミッションに関する。 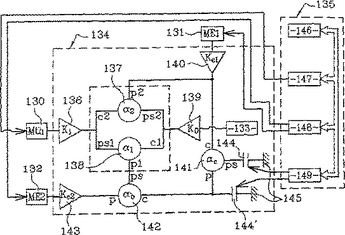 (もっと読む)
(もっと読む)
21 - 39 / 39
[ Back to top ]