
Fターム[5H115RB12]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | 複数電動機の制御 (1,114) | ステアリング角に応じたもの (107)
Fターム[5H115RB12]に分類される特許
1 - 20 / 107
作業車両
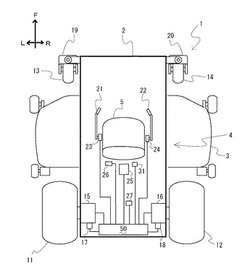
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
電気自動車

【課題】 車両の運転を急激に妨げることなく、インバータの過熱による特性変化および損傷を防止し、モータ駆動の制御特性の変化や、モータ駆動の不能を防止することができ、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、ECU21と、直流電力をモータ6の駆動に用いる交流電力に変換するインバータ31を含むパワー回路部28およびECU21の制御に従って少なくともパワー回路部28を制御するモータコントロール部29を有するインバータ装置22とを備えている。インバータ31に、このインバータ31の温度Tcを検出する温度センサSaを設け、温度センサSaで検出される温度Tcが閾値を超えたとき、温度Tcを時間tで微分したdTc/dtが0以下になるまでインバータ31に与える電流指令に制限を加えるインバータ制限手段95を設けた。
(もっと読む)
電気自動車
【課題】 車輪用軸受、モータ、減速機等の異常に対して、適切な車両の駆動が行えて、車輪用軸受、モータ、減速機等の信頼性確保が行える電気自動車を提供する。
【解決手段】 ECU21およびインバータ装置22を備えた電気自動車において、トルク変動量推定手段37をインバータ装置22に設ける。トルク変動量推定手段37は、車輪回転数を検出する回転センサ24もしくはモータ6の角度センサ36から得られる回転数の変動量、荷重センサ41が検出する路面・タイヤ間の車両進行方向の荷重の変動量、またはモータ電流の変動量から、車輪用軸受4、モータ6、または減速機7に起因するトルク変動を含むトルク変動量を、定められた規則により推定する。
(もっと読む)
電気自動車
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、このモータ6を制御する制御装置とを備えている。前記モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設け、この温度センサSaで検出される温度Tcが閾値を超えたとき、この温度Tcを時間tで微分したdTc/dtが0以下になるまでモータ6の電流値を低減するモータ電流低減手段95を設けた。
(もっと読む)
車両用駆動操舵アクチュエータ
【課題】1つの電動モータにより駆動力と操舵力を自在に制御することができ、しかも、電力消費が少ない車両用駆動操舵アクチュエータを提供する。
【解決手段】車輪駆動ユニット200は、電動モータ11の回転を減速して車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて作動され、電動モータの回転を増減速する無段変速機15と、電動モータの回転動力が直接入力される第1入力部、電動モータの回転動力が無段変速機を介して入力される第2入力部および操舵ユニットを操舵する操舵部材に連結された出力部を有する第2の遊星ギヤ機構17とを備えている。
(もっと読む)
連結自動車
【課題】使い勝手のよい連結自動車を提供する。
【解決手段】連結自動車は、各々が独立走行可能な二台の自動車1,2を連結させて構成される。上記二台の自動車1,2はその後部同士が連結機構1a,2aによって分離可能に連結されている。連結状態では、上記自動車1が運転自動車となり、自動車2が被連結自動車となる。利用者が上記自動車1に乗車して運転操作を行うことにより自動車1,2の連結走行が行われる。
(もっと読む)
ホイール式作業車両
【課題】前輪の駆動源に電動モータを用いることで、車両構成の簡素化を図り、組立性およびメンテナンス性を向上させるとともに、エンジン負荷の軽減を図ったホイール式作業車両を提供する。
【解決手段】車両前後に、左右の前輪23および後輪24を備え、車体フレーム22上に設置したエンジン40の動力を、ミッションケース42を介して後輪24に伝達するとともに、ステアリング操作により前輪23を操向して車両を旋回させ、前輪23の近傍位置には、バッテリー4の電力により駆動する電動モータ5を設置するとともに、この電動モータ5は、インバータIを介してコントローラCに接続し、後輪24の走行負荷状態や車両の旋回状態に基づいてコントローラCにより電動モータ5の駆動を制御して、前輪23を電動モータ5で駆動させる
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
車両の制動制御装置
【課題】
車両の安定性を確保する車両安定化制御において、回生制動と摩擦制動とを効率的に協働し得る車両の制動制御装置を提供する。
【解決手段】
車両の車輪に摩擦制動トルクを付与する摩擦制動手段FRCと、車輪に回生制動トルクを付与する回生制動手段RGNと、制御手段CTLを備える。制御手段CTLは、車両の旋回状態の程度を表す旋回量Tcaに基づいて演算される第1状態量Tcx(例えば、ステア特性量Sch)に基づいて摩擦制動トルクを増加する摩擦制動制御を実行するとともに、旋回量Tcaに基づいて演算される、第1状態量Tcxとは異なる第2状態量Tcy(例えば、操舵速度dSa)に基づいて回生制動トルクを増加する回生制動制御を実行する。制御手段CTLは、回生制動トルクの増加を開始した後に、摩擦制動トルクの増加を開始する。また、回生制動手段RGNは、車輪のうちで少なくとも前輪に備えられる。
(もっと読む)
低損失旋回による航続距離延長制御システム及び方法
【課題】前輪舵角と駆動力差モーメントとの最適な組み合わせによって旋回時に必要な横力を発生させることにより、コーナリング抵抗を低減することによってエネルギー消費を低減する低損失旋回による航続距離延長制御システムを提供すること。
【解決手段】航続距離延長制御システム100は、最適駆動力差モーメントNz*を算出する最適駆動力差モーメント演算手段101と、前輪舵角δfを算出する前輪舵角演算手段102と、各モータに配分するトルク指令値を算出し、その各トルク指令値に基づき各モータを個別に制御するトルク配分制御手段103とからなる。ドライバーが旋回半径に応じてアクティブステアリングを操作すると、前輪舵角のみで旋回する場合に必要となる前輪舵角指令δh*がアクティブステアリングから出力される。駆動力Faccはドライバーのアクセル操作から指令値として入力されるものとしてもよい。
(もっと読む)
車両の速度制御装置
【課題】インホイールモータ車両において、左右輪駆動用のそれぞれの電気モータを適切に制御して、車両旋回状態において左右輪の不要な前後スリップの発生を抑制すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。実際の車輪速度が目標車輪速度に近づくように各車輪にそれぞれ配置された電気モータの通電状態が個別に制御される。車輪間の移動軌跡差に起因する不要な前後スリップが補償され得る。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】慣性モーメントにより発生するトルク差の影響を排除して、制御則通りの制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】モータ16の回転数をNm、左右輪の回転数差をΔN、モータ16の慣性モーメントをIとし、モータ16の減速比Gを[Nm/ΔN]するとき、回転数差ΔNを微分して求めた回転数差角加速度dΔNに、慣性モーメントI及び減速比Gの二乗であるG2を積算して、トルク差の補正値[2G2・I・dΔN]を求め、複数の制御則1〜Mからトルク差に相当する制御出力を求め、制御出力に補正値を加算して、補正トルク差を求め、求めた補正トルク差となるように、モータ16を制御して、車両の姿勢制御を行う。
(もっと読む)
電動車両の差動制限制御装置
【課題】前後軸間、左右輪間の差動制限を行う際、車両振動や駆動力変化を抑制する電動車両の差動制限制御装置を提供する。
【解決手段】車輪間の実回転数差及び目標回転数差を演算し、実回転数差を目標回転数差に追従させる補正トルクを演算し、補正トルクの最大値を制限する最大差動制限トルクを演算し、補正トルクの絶対値の上限値を最大差動制限トルクで制限したリミット出力を演算し、総駆動トルクから配分された目標駆動トルクの一方にリミッタ出力を加算すると共に、他方からリミッタ出力を減算し、当該トルクとなるように、電動モータを制御して、差動制限を行う。
(もっと読む)
移動装置
【課題】発熱を伴って動作する複数の並進機構の熱劣化寿命の延長を図ることができる移動装置を提供する。
【解決手段】複数の並進機構(電動モータ31R,31L)のうち一の並進機構の温度余裕が他の並進機構の温度余裕よりも大きい場合、当該一の並進機構の発熱量が当該他の並進機構の発熱量よりも多くなるように当該複数の並進機構の動作態様が制御される。これにより、複数の並進機構の間での温度余裕の差が低減される。
(もっと読む)
電動車両の制御装置及びその制御装置を備えた電動車両
【課題】この発明は、いずれか1つ又は複数の車輪に設けられたバッテリー或いは回路に異常が生じても、残りの車輪の回転により安定して走行移動させることができる電動車両の制御装置及びその制御装置を備えた電動車両の提供を目的とする。
【解決手段】3輪型又は4輪型の電動車両10において、車両本体11に取り付けられた車輪20,30に、電動モータ50と、バッテリー51と、制御部52と、電圧検知センサー53と、回路異常検知装置54と、回生回路55と、昇降圧回路56を備えた制御装置40が独立して設けられている。また、車輪20,30の制御装置40は、制御装置40を統括して制御する主制御装置41に接続されている。また、車輪20,30と電動モータ50の間に、該車輪20,30に対し電動モータ50の回転力が伝達される連結状態と、該連結が解除される解除状態とに動作する切替え装置57が独立して設けられたものである。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
左右独立駆動車両の駆動ユニット冷却装置
【課題】冷却負荷を平準化して冷却器の小容量化、小型化を図る。
【解決手段】前後左右の四つの車輪FL,FR,RL,RRのそれぞれを互いに独立して駆動することのできる駆動ユニットDU1,DU2を備えた左右独立駆動車両の駆動ユニット冷却装置において、前記駆動ユニットは、左前輪FLと右後輪RRとをそれぞれ独立して駆動することのできる第1駆動ユニットDU1と、右前輪FRと左後輪RLとをそれぞれ独立して駆動することのできる第2駆動ユニットDU2とから構成され、前記第1駆動ユニットDU1から熱を奪って第1駆動ユニットDU1を冷却する第1冷却器CS1と、前記第2駆動ユニットDU2から熱を奪って第2駆動ユニットDU2を冷却する第2冷却器CS2とを備えている。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフト
【課題】高い振動減衰率を有すると共に、加速性能を維持した電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフトを提供する。
【解決手段】駆動タイヤ及び車軸を有する車体と前記駆動タイヤにトルクを付与する駆動モータMとを備える電動車両F1に用いられ、駆動モータMに対してモータ制御指令T*を供給する電動車両用制御装置1であって、前記車軸を中心とした前記電動車両F1の上下振動を示す振動パラメータによって駆動モータMをフィードバック制御することを特徴とする。
(もっと読む)
倒立振子型車両
【課題】車両の用途や使用方法に応じて、適切に車両を制御する。
【解決手段】倒立振子型車両1は、折り畳み可能に組付けられたシート15R,15L及びステップ25R,25Lを備える。シート15R,15L及びステップ25R,25Lの折り畳み状態に基づき決定された動作モードを応じて値が変化する特性パラメータKi_x,Ki_y(i=1,2,3)及びθb_x_obj,θb_y_objを用いて車輪体5の制御用操作量が決定される。
(もっと読む)
1 - 20 / 107
[ Back to top ]