
Fターム[5H115SE09]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | 動力伝達装置 (2,547) | 動力の切換又は分配するもの (1,025)
Fターム[5H115SE09]に分類される特許
61 - 80 / 1,025
ハイブリッド車両のエンジン始動制御装置
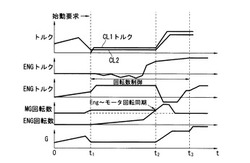
【課題】第1クラッチの締結によるトルク変動に伴うショックを感じにくくする。
【解決手段】エンジンとモータとを駆動源として備え、エンジンとモータとが伝達トルク容量を変更可能な第1クラッチを介して連結され、エンジンを始動する際には第1クラッチを締結してモータの駆動力によりエンジンのクランキングを実施する。また、アクセル操作の結果により停止中のエンジンを始動する第1始動モードと、アクセル操作以外の要因で停止中のエンジンを始動する第2始動モードと、を有している。そして、エンジンのクランキング中の第1クラッチの伝達トルク容量を、第1始動モードに比べて、第2始動モードの方が相対的に低くなるよう設定する。
(もっと読む)
車両の制御装置

【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】急減速時にエンストを防止するハイブリッド車両の制御装置を提供する。
【解決手段】エンジン又はモータジェネレータが出力する回転を自動変速機によって変速して出力することにより走行し、モータジェネレータを発電機として動作させてバッテリに蓄電可能なハイブリッド車両において、エンジン及びモータジェネレータの動作を制御する制御装置であって、自動変速機は、第1及び第2の摩擦要素の少なくとも一つの締結状態を変更することによって変速を実現し、ハイブリッド車両が急減速状態となったときに、急減速に伴って変速が行われるときに締結状態が変化する第1の摩擦要素とは異なる第2の摩擦要素を解放状態に制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 バッテリSOCの高低に関わらず、MWSC走行モードからWSC走行モードへ移行することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換えるときに、目標駆動トルクが大きいほど、モータジェネレータの回転数上昇の変化率を高く設定するようにした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジントルクばらつきがあるような場合でも、エンジン回転数変動を抑制しつつ所望の発電量を実現することである。
【解決手段】統合コントローラ20は、モータ回転数制御を行いつつモータジェネレータにより発電を行う場合には、min{(モータ下限トルク+エンジントルクばらつき),0}<目標発電トルク<max{(モータ上限トルク−エンジントルクばらつき),0}で示される関係式の範囲に設定する。そして、統合コントローラ20は、この関係式が成立しないことを条件に、モータ回転数制御からエンジン回転数制御に切り替える。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータアシスト変速性能の向上を図る。
【解決手段】統合コントローラ20は、モータジェネレータMGの回転数制御に使用可能とするMGトルクについてトルク制限値Tlimitにより制限を掛けている。ここで、トルク制限値Tlimitは、第2クラッチCL2が締結している場合、第1制限値T1に設定され、第2クラッチCL2がスリップ状態である場合、回転変化に必要な補正トルクである第2制限値T2と第1制限値T1との加算値に設定される。
(もっと読む)
電動車両の制御装置
【課題】モータジェネレータと駆動輪との間に設けられた締結要素のスリップ締結とロックアップとのハンチングの発生を抑制できる電動車両の制御装置を提供することこと。
【解決手段】車体速に対応したロックアップ判定閾値に基づいて、車体速がロックアップ判定閾値を越えると、第2クラッチをロックアップ状態とし、車体速がロックアップ判定閾値以下で、第2クラッチをスリップ締結状態とする締結要素制御部を備え、ロックアップ判定閾値としてのTCS時第1切替線L1tcsは、車体速がVset1以下の低速の領域では、車体速がVset2以上の高速の領域に比べて高く設定されていることを特徴とする電動車両の制御装置とした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】演算に必要な構成の簡略化が可能なハイブリッド車両の制御装置を提供すること。
【解決手段】アクセル開度と自動変速機3の入力回転毎に設定されたエンジン用の目標定常トルクマップとモータジェネレータ用のアシストトルクマップとを備え、これら2つのトルクマップの合計を車両の目標駆動トルクとする演算を行う統合コントローラ20を備えたハイブリッド車両の制御装置であって、統合コントローラ20は、エンジン効率とモータ効率を合わせたシステム効率が最適となるトルクを基準として設定した最適発電トルクマップとアシストトルクマップとを1つのマップとしたアシスト・発電統合トルクマップを備え、このアシスト・発電統合トルクマップを用いてアシストトルクおよび発電トルクを演算するとともに、アシストトルクを演算する場合は0トルクで下限制限し、前記発電トルクを演算するときは0トルクを上限制限するようにした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジンアイドル時の振動や音を抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 第1締結要素が解放されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンの燃費を高める第1目標アイドル回転数に設定し、第1締結要素が締結されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンによる共振を抑制する第2目標アイドル回転数に設定するようにした。
(もっと読む)
車両の制動制御装置
【課題】 回生協調制御中にニュートラルレンジが選択された際のショックを抑制できる車両の制動制御装置を提供する。
【解決手段】 モータジェネレータMGおよび左右後輪RL,RR間に自動変速機ATを介在させ、車輪に摩擦制動トルクを付与するブレーキユニットBUと、モータジェネレータMGによる回生制動トルクと摩擦制動トルクとの和が車両の要求制動トルクとなるように回生制動トルクおよび摩擦制動トルクを制御する統合コントローラ10を備えた車両の制動制御装置において、統合コントローラ10は、自動変速機ATのマニュアルバルブからの油圧抜けが検出された場合、当該油圧抜けの速度に応じて回生制動トルクを低下させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 クラッチの耐久性を低下させることなく発進可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 ハイブリッド車両の制御装置において、アクセルペダルが踏み込まれ、かつ、ブレーキペダルが踏み込まれていると判断したときは、第1クラッチを開放し、第2クラッチの伝達トルク容量を検出されたアクセルペダル操作状態に応じて制御し、第2クラッチにエンジンのアイドル回転数よりも小さな所定スリップ量が生じるようにモータを回転数制御する第2クラッチ保護走行モードを設けた。
(もっと読む)
車両用制御装置
【課題】摩擦締結要素を保護するための保護制御が行われ易い状態にあることを、ドライバに対して、適切に告知することのできる車両用制御装置を提供すること。
【解決手段】動力源10,20と駆動輪54との間に介装され、前記動力源と前記駆動輪とを断接する摩擦締結要素25を備える車両に対して制御信号を出力する車両用制御装置であって、前記摩擦締結要素の温度を検出する温度検出手段64と、前記摩擦締結要素の締結トルクを制御する締結トルク制御手段と、前記摩擦締結要素の温度が所定の第1温度以上である場合に、前記締結トルク制御手段を制御し、前記摩擦締結要素の前記締結トルクを、所定の周期で繰り返し変化させるトルク振動制御を行うトルク振動制御手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時に接続される第1クラッチのトルク容量制御精度を向上させることにより、第1クラッチの耐久信頼性を確保しながら、エンジン始動時間やエンジン始動ショックのばらつき低減を達成すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第1クラッチ4と、第2クラッチ5と、第1クラッチトルク指令値補正制御手段(図9,図10)と、を備える。第1クラッチ4は、モータジェネレータ2をスタータモータとするエンジン始動時に接続される。第2クラッチ5は、エンジン始動時にスリップ締結される。第1クラッチトルク指令値補正制御手段(図9,図10)は、第1クラッチ4を接続するエンジン始動時、第1クラッチ伝達トルクをエンジン回転数から推定し、推定結果に基づいて、第1クラッチトルク指令値TTCL1を補正する。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジン1による駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
車両用学習装置およびハイブリッド車両
【課題】クラッチに関する学習機会を適切に確保することができる車両用学習装置を提供すること。
【解決手段】エンジン1と、制御可能なクラッチ5と、クラッチを介してエンジンに接続された入力軸2Aと、車両100の駆動輪16に接続された出力軸2Bと、を有する変速機2と、変速機をニュートラルとした状態で駆動輪に動力を出力可能なモータジェネレータ3と、を備え、エンジンを運転させ、かつ変速機をニュートラルとした状態で、クラッチの係合度合いに関する学習制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エネルギー効率を高めつつ、共振による振動を抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】第1回転電機は、エンジンとの間で動力伝達が行われ、エンジンの動力に基づき発電する。第2回転電機は、車両の駆動軸と連結し、当該駆動軸の動力に基づき回生制動を行う。蓄電手段は、例えばバッテリであり、第1回転電機及び第2回転電機に電力を供給すると共に、第1回転電機及び第2回転電機の回生電力により充電を行う。制御手段は、第2回転電機の回生制動時に、当該回生電力のうち蓄電手段により充電できない電力に基づき、第1回転電機によりエンジン回転数を上昇させるエンジン強制回転制御を行う。このとき、制御手段は、上述の充電できない電力が、エンジン強制回転制御を実行したときにエンジン回転数が共振回転数より大きくなる電力である場合に、エンジン強制回転制御を行う。
(もっと読む)
モータ制御装置
【課題】 非走行レンジの選択によりトルク制御から回転数制御へ移行する際のショックを抑制できるモータ制御装置を提供する。
【解決手段】 第2クラッチ7に対して解放要求(D→N,D→Pセレクト)がなされた場合、第2クラッチ7の油圧が抜けていると判定された後にモータ/ジェネレータ5の制御モードをトルク制御から回転数制御に切り替える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 適切な走行シーンにおいて第1クラッチの学習補正を行うことが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 第2クラッチをスリップ制御してモータを回転数制御しているときに、第1クラッチの締結・開放が行われる走行モードの遷移であっても、第1クラッチの締結・開放以外の要因でモータトルク変動が生じる場合には、第1クラッチの学習補正を禁止することとした。
(もっと読む)
回転機の制御装置
【課題】永久磁石を備えるモータジェネレータ10の減磁の有無を判断するための処理手段を適合するに際し、その工数が多くなること。
【解決手段】モータジェネレータ10は、クラッチC1を介して駆動輪14に機械的に連結されて且つクラッチC2を介してエンジン16に機械的に連結されている。車両の起動スイッチがオンされた直後、クラッチC1,C2を解除した状態において、電流フィードバック制御によってモータジェネレータ10のトルクを制御し、この際の実際のトルクが要求トルクを下回ることに基づき、永久磁石の磁束が減少したと判断する。
(もっと読む)
61 - 80 / 1,025
[ Back to top ]