
Fターム[5H115TB02]の内容
車両の電気的な推進・制動 (204,712) | 速度検出 (3,622) | 速度検出器によるもの (3,504) | 複数設けたもの (326)
Fターム[5H115TB02]に分類される特許
1 - 20 / 326
インホイールモータ車両の駆動装置
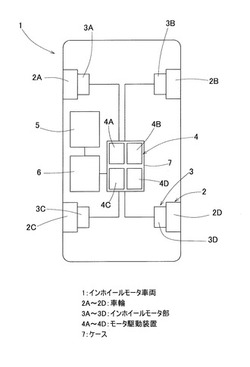
【課題】 小型化、軽量化、および低コスト化が可能なインホイールモータ車両の駆動装置を提供する。
【解決手段】 このインホイールモータ車両の駆動装置は、複数の駆動輪2A〜2Dのうち少なくとも2つの駆動輪に配置した複数のインホイールモータ部3A〜3Dと、これらのインホイールモータ部3A〜3Dをそれぞれ制御する複数のモータ駆動装置4A〜4Dとを備える。モータ駆動装置4A〜4Dは、平滑回路、制御部、インバータ部、およびこのインバータ部を冷却する冷却器からなる。前記複数のモータ駆動装置4A〜4Dを1箇所に集めて同一ケース7内に配置する。
(もっと読む)
車両の制御装置

【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】アクセルペダルが踏み込まれた状態でハイブリッド車両が減速走行するときに部品保護やエネルギ効率の改善を図る。
【解決手段】モータ出力パワーPmg1が閾値Pref以上であってモータMG1が比較的高い回転数で回転しながら正のトルクを出力しており(ステップS130)、モータMG2の回転数変化量ΔNm2が閾値ΔNref未満であり(ステップS150)、かつモータMG2の回転数Nm2が閾値Nref未満である場合(ステップS160)、運転者によりアクセルペダルとブレーキペダルとの双方が同時に踏み込まれたのに伴ってモータMG1およびモータMG2の双方が電力を消費して正のトルクを出力するとみなされ、モータMG2に対するトルク指令Tm2*が減少側に補正される(ステップS170)。
(もっと読む)
電気自動車
【課題】快適な操作性能を確保するとともに、走行安定性に優れた電気自動車を提供する。
【解決手段】電気自動車1は、前輪側の左右輪に制駆動力を伝達する前輪用モータ3fと、後輪側の左右輪に制駆動力を伝達する後輪用モータ3rと、前輪用モータ3fを駆動する前輪用インバータ8fと、後輪用モータ3rを駆動する後輪用インバータ8rとを備え、前輪用モータ3f及び後輪用モータ3rは、車体の中心25aに対して線対称又は点対称に配置され、前輪用インバータ8f及び後輪用インバータ8rは、前輪用モータ3f及び後輪用モータ3rが線対称に配置されているときは線対称に配置され、前輪用モータ3f及び後輪用モータ3rが点対称に配置されているときは点対称に配置された。
(もっと読む)
車両用駆動装置の制御装置
【課題】エンジンからの動力を駆動輪へ出力し差動用電動機により差動状態が制御される差動機構を備えた車両用駆動装置において、車両のスリップ時にも非スリップ時にもエンジンの駆動制御を適切に行うことができる車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド制御手段86は、基本的には、出力回転部材19の実回転速度である差動部実出力回転速度に基づいてエンジン8を制御する。そして、車両6のスリップ時には、上記差動部実出力回転速度に替えて、実際の車速Vに対応する車速基準出力回転速度に基づいてエンジン8を制御する。従って、上記スリップ時にエンジンパワーが不必要に大きくならないようにエンジン8の駆動制御を適切に行うことができる。また、基本的にはエンジン8は出力回転部材19の実回転速度に基づいて制御されるので、車両6のスリップ時以外でもエンジン8の駆動制御を適切に行うことができる。
(もっと読む)
電気駆動車両
【課題】車両のピッチング振動を大きくさせることなく駆動輪のスリップを抑制できる電気駆動車両を提供すること。
【解決手段】電動機1,4と、電動機により駆動される駆動輪3,6と、駆動輪にスリップが発生するときに電動機のトルクを低減させ、当該スリップ解消後に電動機のトルクを回復させる電動機制御装置40とを備えた電気駆動車両において、車両に発生するピッチング振動の振幅を検出するピッチング検出装置26を備え、スリップ解消後に電動機制御装置が一定時間に回復させる電動機のトルク量は、ピッチング検出装置で検出された振幅Aが判定値A1以下の場合と判定値A1を超える場合とで異なっている。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】前輪と後輪とを別々のモータで駆動する構成においてモータの発熱を的確に抑制しつつて走行安定性を確保する上で有利なハイブリッド電気自動車の制御装置を提供する。
【解決手段】フロントモータ18、リアモータ20のうち、一方のモータに分配される駆動トルクTrq1が一方のモータの基準トルクを超過したと判定された場合、他方のモータで駆動される車輪にスリップの発生が否と判定されたときに、一方のモータに分配される駆動トルクTrq1を基準トルクより低減させると共に他方のモータに分配される駆動トルクTrq2を増大させて要求トルクを満足させる。他方のモータで駆動される車輪でのスリップの発生が有と判定され、かつ、エンジンにより駆動される車輪と一方のモータにより駆動される車輪とが同じ車輪である際に、駆動トルクTrq2の増大を禁止して、エンジンに分配される駆動トルクを増大させて要求トルクを満足させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータジェネレータによるアシスト頻度が多くなったときの運転性の悪化を抑制する。
【解決手段】動力源としてエンジン及びモータジェネレータを備えるハイブリッド車両の制御装置であって、通常走行時よりも駆動力が要求される走行時であるかを判定する判定手段(S1)と、モータジェネレータを電動機として機能させるアシスト時間を算出するアシスト時間算出手段(S2,S4,S5)と、を備え、アシスト時間算出手段は、通常走行時よりも駆動力が要求される走行時であると判定されたときに、アシスト時間を通常走行時よりも短くする。
(もっと読む)
車両用ブレーキ装置
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
車両の制御装置
【課題】摩擦係合要素状態のばらつきに拘らず、駆動源回転数の吹け上がりを抑制することができる車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、駆動源制御手段(図11)により、駆動源(エンジン)1からの出力トルクを制御するトルク指令値を、伝達容量検出手段(CL1ストロークセンサ)16により検出された摩擦係合要素(第1クラッチ)4における伝達トルク容量を超えない値に設定する。
(もっと読む)
車両の制動力制御装置
【課題】 制動時における回生電力の回収効率の向上と車輪のロック状態の早期の回復とを両立させる車両の制動力制御装置を提供すること。
【解決手段】 電子制御ユニット26は、各輪11〜14がロックする傾向を有するとき、蓄電装置20を構成するバッテリのバッテリ容量Yが小さければ左右前輪11,12に設けられたインホイールモータ15,16を回生状態により作動させてモータ制動トルクを発生させるとともに左右後輪13,14に設けられたインホイールモータ17,18を力行状態により作動させてモータ駆動トルクを発生させる。一方、ユニット26は、容量Yが大きければ前輪11,12に設けられたモータ15,16を力行状態により作動させてモータ駆動トルクを発生させるとともに後輪13,14に設けられたモータ17,18を回生状態により作動させてモータ制動トルクを発生させる。
(もっと読む)
車両の制動力制御装置
【課題】 制動時における車輪のロック状態を応答性よく回避し、運転者が車輪のロック状態を回避している状態を良好に把握できる車両の制動力制御装置を提供すること。
【解決手段】 車両の制動力制御装置は、状態Aのとき、電動力発生機構としてのインホイールモータを回生状態により作動させてモータ制動トルクTmrを発生させるとともに摩擦制動力Bfを制動力発生機構としての摩擦ブレーキ機構に発生させる。一方、車両の制動力制御装置は、状態Bのとき、インホイールモータを力行状態により作動させてモータ駆動トルクTmcを発生させるとともに、摩擦ブレーキ機構に増大させた摩擦制動力Bfを発生させる。さらに、車両の制動力制御装置は、状態遷移中において、インホイールモータに供給するd軸の目標電流Id*を増大させるとともに周期的に変動させてインホイールモータに擬似的な作動音(磁気音)を発生させる。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
電気駆動車両
【課題】加速走行時における加速時間及び減速走行時における制動距離を短縮するとともに、電気駆動車両の振動を抑制する。
【解決手段】駆動輪3,6と、従動輪7,8と、駆動輪を駆動又は制動する電動機1,4と、電動機を制御する電動機制御器33とを備える電気駆動車両において、駆動輪及び従動輪の車輪速度を検出する車輪速度検出器9〜12と、駆動輪及び従動輪の車輪速度から駆動輪のスリップ率を演算する演算手段と、スリップ率がスリップ率判定値を超える場合に駆動輪がスリップしていると判定する判定器とを備える。判定器において、従動輪の車輪速度が設定速度より小さいとき、スリップ率判定値を、従動輪の車輪速度が設定速度より大きいときに利用される値と符号が同じで絶対値が大きい値に変更する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
作業車両の電動式走行駆動装置
【課題】作業車両に作用する制動方向と反対方向の外力の変化に対し、ブレーキペダルによる制動の操作性を安定させることができる作業車両の電動式走行駆動装置の提供。
【解決手段】ペダルの踏込み量Rの全範囲を、踏込み量0側の初期範囲rsと、最大値Rmax側の終期範囲reと、これら初期範囲rsと終期範囲reの間の中間範囲rmとに区分し、初期範囲rs内、終期範囲re内、中間範囲rm内のそれぞれの踏込み量Rに対応する制動トルク目標値として第1目標値、第2目標値、第3目標値のそれぞれを演算し、第3目標値の踏込み量Rに対するゲインは第1,第2目標値のどちらの踏込み量Rに対するゲインよりも小さくなるよう設定されており、第3目標値、初期範囲rsの上限値Rv1、終期範囲reの下限値Rv2を外力が大きいほど大きく調整することで、目標制動トルクTR,TLの特性をS1からS3までの間で調整する。
(もっと読む)
車両の制御装置
【課題】車両のブレーキとアクセルの同時踏み込み時の安全性を向上させる。
【解決手段】車両には、アクセル開度を検出するアクセルセンサ12と、ブレーキ操作を検出する2つのブレーキスイッチ13,14を設ける。2つのブレーキスイッチ13,14のいずれか一方がオフ故障すると、運転者がブレーキを踏み込んでも当該オフ故障したブレーキスイッチがオフ状態のまま維持されるが、運転者がブレーキを踏み込むと、故障していない方のブレーキスイッチがオンする。このとき、アクセルセンサ12が所定開度より大きければ、アクセルとブレーキの両方が同時に踏み込まれて出力制限実行条件が成立していると判断して、駆動源11(エンジン及び/又はモータ)の出力を所定値以下に制限する。
(もっと読む)
駆動制御装置
【課題】 車両の走行状態に応じて適切に旋回することができる駆動制御装置を提供すること。
【解決手段】 第1規範ヨーレイト算出手段8a4によって、横加速度センサ32で検出された加速度に応じて第1規範ヨーレイトが算出され、第2規範ヨーレイト算出手段8a5によって、横加速度推定手段8a3で推定した加速度に応じて第2規範ヨーレイトが算出される。横加速度推定手段8a3は、操舵角と走行速度に基づいて加速度を推定する。走行速度と操舵角とに応じて規範ヨーレイト選択手段8a6によって選択された規範ヨーレイトと走行速度とに基づいて、基準差回転算出手段8a7によって基準差回転が算出される。制御手段8a1によって、実差回転と基準差回転との偏差に応じて差回転設定機構Tを制御する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
1 - 20 / 326
[ Back to top ]