
Fターム[5H115TO07]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 勾配検出 (389)
Fターム[5H115TO07]に分類される特許
81 - 100 / 389
動力伝達装置
【課題】蓄電装置の耐久性を向上させることを課題とする。
【解決手段】動力伝達装置は、車両用の動力伝達装置であって、電動機と、無段変速部と、有段変速部と、蓄電装置と、を有する。無段変速部は、駆動源からの出力が入力され、前記電動機により差動状態が制御される。蓄電装置は、第1蓄電部、及び、第1蓄電部よりも入出力特性が優れた第2蓄電部を有し、有段変速機の変速制御により電動機と授受される電力を第2蓄電部に蓄電する。また、動力伝達装置は予測部と制御部とを備える。予測部は、車両の走行状況による駆動力伝達変化を予測する。制御部は、予測部により駆動力伝達変化が予測された場合には、変速制御時における蓄電装置と電動機との間で授受される電力量を制限する。これにより、駆動力伝達変化が生じることによる蓄電装置の耐久性低下を防ぐことができる。
(もっと読む)
車両用制御装置および車両用制御方法

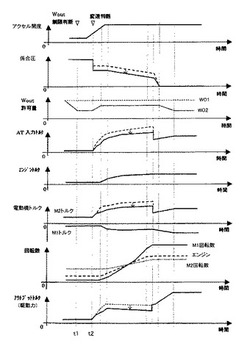
【課題】給電エリア内での充電量を増加させて、給電エリアでの充電を十分に活用する。
【解決手段】ECUは、給電エリアの給電情報を取得するステップ(S100)と、給電装置から受電できる電力量の第1上限値Waを算出するステップ(S102)と、充電によって受け入れられる電力量の第2上限値Wbを算出するステップ(S104)と、第1上限値Waが第2上限値Wbよりも大きい場合(S106にてYES)、エンジン始動しきい値として第2しきい値Th(2)を決定するステップ(S112)と、駆動量制御を実行するステップ(S114)とを含む、プログラムを実行する。
(もっと読む)
駆動装置及び車両
【課題】斜面に停車させた車両が滑落することを容易かつ効果的に抑制する駆動装置や、当該駆動装置を備える車両を提供する。
【解決手段】駆動装置1は、電力を供給するバッテリ11と、バッテリ11から供給される電力を変換するインバータ12と、インバータ12から供給される電力によって車両を駆動する動力を発生するモータ13と、インバータ12における電力の変換を制御するインバータ制御部14と、車両の速度を測定する速度測定部15と、車両の傾斜度を測定する傾斜度測定部16と、車両の重量を測定する重量測定部17と、を備える。インバータ制御部14は、重量測定部17が測定する車両の重量と、傾斜度測定部16が測定する傾斜度とに基づいて、車両にかかる斜面に沿って下向きの力を求め、当該力を相殺する力がモータ13から発生するように、インバータ12を制御する。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】駐車支援の途中で駐車支援が継続できなくなることを未然に抑制することができる車両制御システムを提供すること。
【解決手段】バッテリと、バッテリからの電力により動力を出力し、出力された動力で駆動輪を回転させて車両を走行させることが可能なモータと、モータに動力を出力させて、目標駐車位置へ向けて車両を走行させる運転者の運転操作を支援する車両制御装置とを備える車両制御システムであって、車両制御装置は、支援を開始する前に、支援においてモータに要求される動力と、モータが出力可能な動力とのそれぞれの予測結果に基づいて、車両が目標駐車位置に駐車されるまでモータが要求される動力を出力可能であれば(S160−N)支援を実行し、要求される動力は、車両の周辺環境に基づいて予測され(S120)、出力可能な動力は、支援を開始する前のバッテリの蓄電量(S140)に基づいて予測される。
(もっと読む)
電動車両の冷却システム
【課題】従来と同等なトルクと出力を得ながら、電動車両に用いられるモータとインバータ電源の体格を小さくする。
【解決手段】車両を電動駆動する電動駆動手段1、2に冷却媒体を循環させる冷媒循環路6と、冷却媒体と外気との間で熱交換を行う熱交換手段3と、冷媒循環路6を通して熱交換手段3と電動駆動手段1、2との間で冷却媒体を循環させる冷媒循環手段5と、熱交換手段3に送風する送風手段4と、冷媒循環手段5と送風手段4を制御して電動駆動手段1、2の冷却を制御する制御手段23とを備え、制御手段23によって、電動駆動手段1、2による車両の駆動力が第一作動領域にある場合は、冷媒循環手段5と送風手段4を第一冷却モードで制御し、電動駆動手段1、2による車両の駆動力が第一作動領域よりも高い第二作動領域にある場合には、冷媒循環手段5と送風手段4を第一冷却モードよりも冷却能力が高い第二冷却モードで制御する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】走行経路に登坂路がある場合に、エンジンで車両を走行させながら電動機で発電を行う発電走行を効率良く行って、走行中の総合的な燃料消費率を良好に維持するようにしたハイブリッド電気自動車の制御装置を提供する。
【解決手段】ナビゲーションシステム40に予め登録された走行経路に基づき走行経路中の登坂路を判定し、運転者の要求トルクTrと、次に到着が予測される登坂路で電動機6に配分される登坂電動機トルクTmとの和である発電走行トルクTg1をエンジン2が出力可能であると共に、エンジン2が要求トルクTrを出力するときよりも発電走行トルクTg1を出力するときの方が燃料消費率が改善する場合に、当該登坂路に到着する前にエンジン2から発電走行トルクTg1を出力させると共に、発電機として作動する電動機6を駆動するためのトルクを登坂電動機トルクTmとする。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】ハイブリッド電気自動車に関し、走行する自車両の前方に降坂路がある場合に、簡素な論理でエンジン駆動による発電を抑制することができるようにする。
【解決手段】バッテリ19の充電状態を検出する充電状態検出手段23と、充電状態検出手段23により検出されたバッテリ19の充電状態が所定の下限値未満になったら、エンジン11の駆動による電動発電機12での発電を行うと判定するエンジン駆動発電判定手段25と、走行する自車両1の前方に、降坂路があるか否かを判定する降坂路判定手段26と、降坂路判定手段26により降坂路があると判定されたら、エンジン駆動発電判定手段25の判定に関らず、エンジン11駆動による電動発電機12での発電を禁止するエンジン駆動発電禁止手段27とをそなえる。
(もっと読む)
移動ロボット及びその走行安定化方法
【課題】移動体が段差を乗越えた際に発生する横方向振動を抑制する。
【解決手段】本発明による走行安定化装置はセンサ情報または地図情報を利用し、移動体と凹部凸部を含む段差との接触時点を予測し、アクチュエータを制御することで移動体の重心を左右方向に動かし、段差を乗越えたことを検出した際は次の段差に対応するように移動体の重心を左右に動かすことを特徴とする。
(もっと読む)
倒立振子型移動体の電装部品冷却装置
【課題】倒立振子型移動体における制御装置に用いられる送風ファンによる冷却性能を向上する。
【解決手段】移動体1の前進時の走行風を取り入れる通気孔39Aを有し、前進時の走行風による流入風の流れ方向に送風する送風ファン247を設け、流入風Wとファン送風F1,F2とを合わせて、基板243,244のパワー素子243a,244aの発熱を冷却する。前後左右移動および停止時を判別し、送風ファンの回転速度を、左右・停止時には前進時より高くし、後進時にはさらに高くする。前進時以外での流入風の減少に対しては送風ファンの回転速度を高めて常に良好な冷却性を確保し得る。また、走行風の最も少ない取り込み量に基づいて送風ファンの能力を設定した場合に対して、必要最小限の能力となる小型の送風ファンを用いることができる。
(もっと読む)
倒立振子型移動体
【課題】 倒立振子型移動体に、搭載バッテリの残量が低下した場合のフェイルセーフ機能を設ける。
【解決手段】 倒立振子移動体1であって、フレーム2と、フレームの下部に設けられ、フレームを床面上において任意の方向に走行させるともに、フレームの姿勢制御に供される走行ユニット3と、走行ユニットを駆動制御する倒立振子制御装置5と、走行ユニットに給電するバッテリ281と、バッテリの残量を検出するバッテリ残量検出手段285とを備え、倒立振子制御装置は、バッテリ残量検出手段によって検出されたバッテリ残量に基づいて、走行ユニットによる走行速度を制限することを特徴とする。
(もっと読む)
倒立振子型移動体の制御装置
【課題】手の操作により倒立振子型移動体の位置を変更させることが可能な倒立振子型移動体の制御装置を提供する。
【解決手段】倒立振子型移動体1は、基体9と、該基体9に接続され、基体9を前後左右方向に移動可能とする移動動作部5及びアクチュエータ装置7と、該移動動作部5及びアクチュエータ装置7を制御する制御ユニット50と、倒立振子型移動体1の外部に位置する操作者の手の動きを検知して、その手の動きによる指令内容を検出する指令検出器10と、を備え、制御ユニット50が、検出した指令内容に応じて前記移動動作部5及びアクチュエータ装置7の制御を行う。
(もっと読む)
倒立振子型移動体の制御装置
【課題】消費電力を抑えることができて、かつ、使用を中断した後に再開するまで時間がかかることがない倒立振子型移動体を提供する。
【解決手段】基体9と、車輪を有する移動部5と、移動駆動部31R,31Lとを有する倒立振子型移動体の制御装置において、基体の傾斜角度または傾斜角速度を検出する傾斜センサ52と、移動駆動部を制御する制御部50とを有していて、電源モードとして、通常モードと、スタンバイモードとを有していて、電源モードをスタンバイモードに移行させるためのスタンバイスイッチを有していて、制御部は、電源モードが通常モードであるときに、スタンバイスイッチがオンされた場合には、電源モードをスタンバイモードに移行させ、電源モードがスタンバイモードであるときに、傾斜センサによって検出された傾斜角度または傾斜角速度が所定の傾斜許容値を超えた場合には、電源モードを通常モードに移行させることを特徴とする。
(もっと読む)
倒立振子型移動体
【課題】倒立振子型移動体において、コンパクトな構成を実現しつつ、そのの重心位置と傾斜センサの設置位置とを略一致させて、倒立振子制御の制御応答性を向上させる。
【解決手段】下部フレーム22と、この下部フレームの上側に接続された上部フレーム21とを有する移動体1において、下部フレームに保持された移動用の走行ユニット3と、上部フレームに保持され、走行ユニットに電力を供給するバッテリユニット10と、下部フレームと上部フレームとの少なくとも一方に保持され、鉛直方向における走行ユニットとバッテリユニットとの間に配置された倒立振子制御用の傾斜センサ7とを備えた構成とする。
(もっと読む)
車両駆動制御装置
【課題】目的地に至る経路を特定するための操作を必要とすることなく、エネルギー消費量の低減を図る。
【解決手段】無線情報に基づいて走行先に渋滞区間が存在することを判定した場合、モータを使用して渋滞区間を走行する場合に渋滞終了地点でバッテリの充電量が予め定められた規格値以上となるように、渋滞開始地点で必要とされる必要バッテリ充電量を特定し(S402)、渋滞開始地点の手前の一部区間を抽出し、当該渋滞開始地点の手前の一部区間について、渋滞開始地点におけるバッテリの充電量が必要バッテリ充電量以上となるように制御指標のスケジュールを規定する(S404)。
(もっと読む)
倒立振子型移動体
【課題】他の移動体との連携動作が可能な倒立振子型移動体を提供すること。
【解決手段】通信部701(情報取得手段)により、他移動体の現在の状態(姿勢)を表す状態情報を取得する。姿勢制御演算部80(移動制御手段)は、前記状態情報に基づき、前記他移動体の現在の状態(姿勢)に対する自移動体(倒立振子型移動体)の状態(姿勢)が前記自移動体と前記他移動体とを連携動作させるために規定された所定の条件を満たすように、前記自移動体の移動を制御する。
(もっと読む)
倒立振子型移動体
【課題】 倒立振子型移動体の周囲にいる通行人等に倒立振子型移動体の走行方向を報知し注意喚起する。
【解決手段】 倒立振子型移動体1であって、フレーム2と、フレームに設けられ、任意の方向に走行させる走行ユニット3と、走行方向および走行速度を操作するための走行方向および走行速度に関する操作入力信号(傾斜角)を生じさせる傾斜センサ7と、操作入力信号に応じて走行ユニットの走行方向および走行速度に関する目標値を設定し、走行方向および走行速度を目標値の走行方向および走行速度に一致させるように走行ユニットの駆動制御を行う倒立振子制御ユニット5と、フレームに設けられたランプユニット400とを有し、制御ユニットは、走行方向に関する操作入力信号または目標値に基づいてランプユニット400の作動制御を行うことを特徴とする。
(もっと読む)
倒立振子型車両
【課題】車両の用途や使用方法に応じて、適切に車両を制御する。
【解決手段】倒立振子型車両1は、折り畳み可能に組付けられたシート15R,15L及びステップ25R,25Lを備える。シート15R,15L及びステップ25R,25Lの折り畳み状態に基づき決定された動作モードを応じて値が変化する特性パラメータKi_x,Ki_y(i=1,2,3)及びθb_x_obj,θb_y_objを用いて車輪体5の制御用操作量が決定される。
(もっと読む)
走行装置及びその制御方法
【課題】搭乗者が車両へ安全かつ容易に搭乗できる走行装置及びその制御方法を提供すること。
【解決手段】走行装置10は、車両本体1の倒立状態を維持するための倒立制御を行いつつ、搭乗者を乗せて走行する。また、走行装置10は、車両本体1を駆動する駆動手段と、搭乗者による車両本体1への搭乗の開始を検出する搭乗検出手段と、搭乗検出手段により搭乗の開始が検出されると、倒立制御を行いつつ、搭乗が容易となる位置に車両本体1を移動させる位置制御を行うためのトルク指令値を生成する指令値生成手段と、指令値生成手段により生成されたトルク指令値に基づいて、駆動手段を制御する制御手段と、を備えている。
(もっと読む)
車両の制御装置
【課題】登坂路において車両のずり下がりを抑制する。
【解決手段】HV_ECUは、推定勾配を算出するステップ(S100)と、坂路であって(S102にてYES)、車速の絶対値がV(0)以下であると(S104にてYES)、推定勾配の変化をレートリミット処理するステップ(S106)と、ヒステリシス処理を実施するステップ(S110)と、クリープアップ係数を算出するステップ(S112)と、クリープアップトルクを算出するステップ(S114)とを含む、プログラムを実行する。
(もっと読む)
車両
【課題】旋回操作が容易で、車体を容易に傾斜させることができ、外乱を受けたときにも操舵輪を適切に操舵することができ、車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】乗員が操作する操舵装置から操舵軸に入力されるトルクを検出する第1トルクセンサと、操舵輪から操舵軸に入力されるトルクを検出する第2トルクセンサと、傾斜用アクチュエータ装置と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有する車両であって、制御装置は、第1トルクセンサが検出したトルクよりも第2トルクセンサが検出したトルクのほうが大きい場合には、操舵軸に入力されるトルクの方向と反対の方向に車体を傾斜させる。
(もっと読む)
81 - 100 / 389
[ Back to top ]