
Fターム[5H115TO07]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 勾配検出 (389)
Fターム[5H115TO07]に分類される特許
61 - 80 / 389
作業車両の電動式走行駆動装置
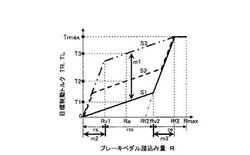
【課題】作業車両に作用する制動方向と反対方向の外力の変化に対し、ブレーキペダルによる制動の操作性を安定させることができる作業車両の電動式走行駆動装置の提供。
【解決手段】ペダルの踏込み量Rの全範囲を、踏込み量0側の初期範囲rsと、最大値Rmax側の終期範囲reと、これら初期範囲rsと終期範囲reの間の中間範囲rmとに区分し、初期範囲rs内、終期範囲re内、中間範囲rm内のそれぞれの踏込み量Rに対応する制動トルク目標値として第1目標値、第2目標値、第3目標値のそれぞれを演算し、第3目標値の踏込み量Rに対するゲインは第1,第2目標値のどちらの踏込み量Rに対するゲインよりも小さくなるよう設定されており、第3目標値、初期範囲rsの上限値Rv1、終期範囲reの下限値Rv2を外力が大きいほど大きく調整することで、目標制動トルクTR,TLの特性をS1からS3までの間で調整する。
(もっと読む)
運転支援装置

【課題】走行計画を立案することなく、かつ、燃費向上効果の向上を図る。
【解決手段】車両の走行先に存在する予め定められた領域における道路状況、現在の車両状況および過去の操作状況の少なくとも1つに関する情報を取得し、これらの情報に基づいて車両の走行先で車両の燃費の悪化を招くことになるか否かを予測し、車両の燃費の悪化を招くことになると予測された場合、車両の燃費を向上するための操作が車両の乗員に事前に報知する。
(もっと読む)
車両の駆動制御装置
【課題】例えばハイブリッド車両等の車両において、より適切にエンジンを始動することを可能とする。
【解決手段】車両の駆動制御装置(2A)は、第1回転電機(4又はMG1)と、相互に差動回転可能な3つの分配要素を持ちこれらのうちのいずれか2つの分配要素の一方に内燃機関が他方に前記第1回転電機が夫々連結された動力分配機構(5)と、動力分配機構の残りの分配要素に連結された第2回転電機(10又はMG2)と、動力分配機構の残りの分配要素に連結された伝達部材(6)と、車両の駆動輪に動力を出力する出力部材(7)と、伝達部材から出力部材までの動力伝達経路に設けられると共に、相互に差動回転可能な複数の要素を有する変速機構(8)と、第1回転電機による内燃機関の始動の際に、第2回転電機に要求される要求出力トルクが許容上限値を超えるか否かを判定する判定手段(30)と、許容上限値を超えると判定される場合、第2回転電機の回転が機械的にロックされるギア段へ変速するように変速機構を制御する制御手段(30)とを備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】固定変速比モードにおいて、ハイブリッド車両の適切な運転を実現する。
【解決手段】ハイブリッド車両の制御装置(4)は、エンジン(1)及び回転電機(MG2)を備え、ハイブリッド車両で要求される走行状態に基づいて、エンジントルクを設定する設定手段(4)と、ハイブリッド車両が走行する道路の路面勾配に基づいて、設定されたエンジントルクを補正するエンジントルク補正手段(4)と、走行状態及び補正されたエンジントルクに基づいて、回転電機の回転トルクを設定する回転トルク設定手段(4)と、補正されたエンジントルクを出力するようにエンジンを制御し、設定された回転トルクを出力するように回転電機を制御する制御手段(4)とを備える。
(もっと読む)
ハイブリッド自動車
【課題】エンジンの回転により駆動され作動油を圧送するポンプからの作動油を用いてモータを冷却するものにおいて、モータが高温になるのをより適正に抑制する。
【解決手段】シフトポジションSPがB,SポジションのときにはDポジションのときに比して小さくなるように、且つ、運転者によりパワーモードやVSCオフモードが設定されているときには設定されていないときに比して小さくなるように、エンジンの停止を禁止する間欠禁止勾配閾値θref1とエンジンの停止を禁止する間欠禁止モータ温度閾値Tref1とを設定し、また、シフトポジションSPがB,SポジションのときにはDポジションのときに比して高くなるように、且つ、パワーモードやVSCオフモードが設定されているときには設定されていないときに比して高くなるように、エンジンの勾配下限回転数Nemin1とモータ温度下限回転数Nemin2とを設定して、駆動制御を実行する。
(もっと読む)
列車制御装置
【課題】自列車の位置を正確に検出できない路線においても、勾配のある区間で速度を目標速度バンド内に精度よく保って走行する。
【解決手段】本発明の一実施例に係る列車制御装置は、現在の列車速度をサンプリングして、加減速度を演算する加減速度演算部15と、前記加減速度及びノッチ特性に基づいて、走行路の勾配抵抗を求め、前記勾配抵抗及びノッチ特性を用いて所定時間後の列車速度を予測する速度予測部17と、所定時間後の列車速度が速度追従バンド内に収まるよう、ノッチ指令を決定するノッチ指令決定部18とを具備する。
(もっと読む)
車両
【課題】車両の進路上の路面変化に対応した適切な駆動力配分を前以て実現することができる車両を提供する。
【解決手段】車両のメインECU3は、第1情報取得部4Aにより取得された第1情報から導出される第1位置の路面摩擦係数である第1摩擦係数μ1と、第2情報取得部4Bにより取得された第2情報から導出される第2位置の路面摩擦係数である第2摩擦係数μ2とから、車両の総駆動力の目標値を決定する。そして、総駆動力の目標値を満たし且つ第1摩擦係数μ1に対応したスリップ限界を超えないように、第1駆動力および第2駆動力の目標値を決定する。
(もっと読む)
ハイブリッド車両用駆動装置
【課題】電動機のアシストによって良好なドライバビリティを与えることができるとともに、より効率的な回生を行うことができるハイブリッド車両用駆動装置を提供する。
【解決手段】変速段毎に、前記内燃機関のBSFCをボトムトレースするBSFCボトムトルク線からそれぞれオフセットして設定されたアップシフト線及びダウンシフト線を有する変速マップから、車速とアクセル開度に基づいてギヤ段を検索すると共に、車速に応じて各ギヤ段での出力トルクを検索し、前記出力トルクを目標出力トルクと比較して目標ギヤ段を選択する。
(もっと読む)
車両駆動システムの制御装置
【課題】車両の停車中にMG(モータジェネレータ)で減速ギヤ機構にトルクを付加する押し当て制御を実行するシステムにおいて、車両停車を保持できる状態で押し当て制御を許可できると共に、押し当て制御を許可する範囲を広げることができるようにする。
【解決手段】押し当て制御によって動力伝達系(例えば、車輪14、車軸33、ペラ軸17等)に作用する押し当てトルク(目標値)と、路面勾配によって動力伝達系に作用する勾配トルクと、ブレーキ装置34によって動力伝達系に付加可能なブレーキトルクとを算出し、動力伝達系の正回転方向のトルクを正の値としてブレーキトルクと勾配トルクと押し当てトルクとが下記の2つの条件を両方とも満たす場合に押し当て制御を許可する。
|ブレーキトルク|≧|勾配トルク|
|ブレーキトルク|≧|勾配トルク+押し当てトルク|
(もっと読む)
経路案内装置、経路案内方法及びコンピュータプログラム
【課題】二次電池によって駆動される電気自動車によって目的地までの経路を走行する際にその電気自動車で消費される電力を算出し、算出結果をドライバーに提示することが可能な経路案内装置を提供する。
【解決手段】二次電池で駆動する電気自動車によって所定の目的地へ向かう経路を1以上探索する経路探索部と、経路探索部が探索した経路を電気自動車によって目的地まで走行する際の該電気自動車の消費電力を、該電気自動車の走行の際の消費する電力の情報及び該経路に関する地理的情報に基づいて算出する消費電力算出部と、を備える、経路案内装置が提供される。
(もっと読む)
電動車椅子
【課題】側溝近傍や駅のプラットホーム走行時に、側溝や線路上への転落を警告することによって、安全な操作を容易行える電動車椅子を提供する。
【解決手段】自車に取り付けた距離センサによって、自車と走行路面までの距離を計測し、その計測結果を基に、自車近傍の段差を検知して、乗員へ警告あるいは走行禁止の判断を行うことによって、凹段差への転落の危険性を軽減できるため、駅のプラットホーム上などにおいても電動車椅子を安全に操作さすることが容易となる。
(もっと読む)
ハイブリッド車両用駆動装置
【課題】登坂路をEV走行モードで走行する場合に、加速要求と燃費の向上の両方を満足させることができるハイブリッド車両用駆動装置を提供する。
【解決手段】本発明のハイブリッド車両用駆動装置は、電動機によって出力可能な最大トルクを導出する最大トルク導出部と、電動機によって内燃機関を始動させるための始動トルクを導出する始動トルク導出部と、最大トルクと前記始動トルクとに基づき、電動機のみの動力により走行する際に電動機が出力するトルクの制限値を設定するトルク制限値設定部と、現在走行中の路面の傾斜度を導出する傾斜度導出部と、傾斜度を判定する傾斜度判定部と、を備える。傾斜度判定部により傾斜度が第1しきい値以上であると判定された場合、トルク制限値設定部は、最大トルクの範囲内で、通常よりも大きいトルク制限値を設定する。
(もっと読む)
電動車両用電池制御装置
【課題】往路と帰路で同じ道路を通ることを前提として、往路走行中どの時点で出発点に戻れなくなるかを運転者に通知できる電動車両用電池制御装置を提供する。
【解決手段】出発点から目的地までの往路を走行し、当該往路を帰路として出発点に戻る電動車両において、出発点からの所定走行距離毎に道路の勾配の度合いを検出する勾配センサ11と、電動車両の走行速度、道路の勾配の度合い、放電電流並びに回生電流との関係を予め記憶しているメモリ12とを有し、道路の勾配の度合いをメモリ12に記憶すると同時に、出発点からの所定走行距離毎に、メモリ12に記憶された道路の勾配の度合いのデータとメモリ12に予め記憶された電動車両の走行速度、道路の勾配の度合い、放電電流並びに回生電流との関係とから出発点への帰路に要する駆動用二次電池の電力容量を演算する電動車両用電池制御装置。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】本線上にてブレーキ操作を行なうことで後続車両の走行態様に影響を与えるような事態を回避することができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】
回生ブレーキ機構30を備えた車両が本線から退出路へ退出する際の運転支援を行う運転支援装置60であって、現在地点検出部61aと、退出路に設定された規制速度と規制開始地点の情報を含む地図情報を格納する地図情報DB62aと、回生ブレーキ機構30により所定の回生効率以上の回生効率を得ることができる所定の減速度に基づいて、規制開始地点における速度を規制速度とするために回生ブレーキによる減速を開始すべき回生開始地点を決定する回生開始地点決定部61cと、回生開始地点が退出路にある場合には第1の運転支援方法による案内を行い、回生開始地点が本線にある場合には第2の運転支援方法による案内を行う案内部61dとを備える。
(もっと読む)
車両制御システム
【課題】実アクセル開度に対する駆動力を走行路に応じて適切に変えること。
【解決手段】走行路の状態を判定する走行路判定装置20と、運転者のアクセル操作に伴う実アクセル開度を駆動力制御用アクセル開度に変換し、この駆動力制御用アクセル開度に基づきエンジン110を制御して駆動力を発生させる走行制御装置10と、を備える。そして、走行制御装置10は、駆動力制御用アクセル開度における実アクセル開度に対する駆動力の発生量を抑制させる増加勾配の小さい駆動力抑制領域と当該駆動力の発生量を増加させる増加勾配の大きい駆動力増加領域との間の勾配変動点を走行路の状態に応じて実アクセル開度の小開度側又は大開度側に変化させること。
(もっと読む)
充電制御方法
【課題】より適正にバッテリのSOCを制御することができる充電制御方法を提供する。
【解決手段】充電制御方法は、燃料電池車の走行経路を記憶する走行経路記憶工程(ステップS50)と、走行経路記憶工程による走行経路の記憶時に、走行経路上の地点における高圧バッテリのSOCを記憶するSOC記憶工程(ステップS50)と、走行経路とSOCを記憶したよりも後に、記憶された走行経路上の地点を走行することが予測された場合、予め設定された基準値と記憶されているSOCとに基づいて、SOC余裕度を算出するSOC余裕度算出工程(ステップS20)と、SOC余裕度算出工程において算出された余裕度が、走行経路上の地点を走行後に基準値以下となる場合には、この基準値以下となる走行経路上の地点を走行するよりも前に、高圧バッテリの充電を促進する充電促進工程(ステップS40)とからなる。
(もっと読む)
蓄積対象制御装置、方法およびプログラム
【課題】効率的に回生エネルギーを回収するための技術の提供。
【解決手段】車両の走行予定道路の前方における前記車両の制動要因を示す情報を取得し、前記制動要因を示す情報に基づいて、回生エネルギーを優先的に蓄積する蓄積対象を運動エネルギー蓄積部および電気エネルギー蓄積部から選択し、前記制動要因に応じた前記車両の制動が行われる際に、選択された前記蓄積対象に対して優先的に回生エネルギーを蓄積させる。
(もっと読む)
移動体及び移動体の制御方法
【課題】補助輪が存在しない方向に傾動する力が加わった場合に、転倒を防止する。
【解決手段】移動体100は、車体10と、左右の駆動輪12、13と、駆動輪12、13を制御する制御手段19と、駆動輪12、13の前方又は後方に配置された補助輪16と、を備える。制御手段19は、補助輪16が接地していないと、補助輪16が配置されている側に車体10が傾動するように駆動輪12、13を制御する。これにより、移動体が倒れないようにする姿勢制御を行わない状態において、補助輪が存在しない方向に傾動する力が加わった場合であっても、転倒を防止することができる。
(もっと読む)
自動列車運転装置
【課題】電気ブレーキと空気ブレーキとの配分に応じて複雑な調整を必要とせず、且つ外乱にも強い自動列車運転装置を提供する。
【解決手段】列車の速度を検出する速度検出部31と、列車の走行位置を演算する位置演算部32と、列車の目標速度を規定する速度パターン生成部33と、速度パターンと列車速度に基づきノッチ指令ntを生成するノッチ制御部34と、ノッチ指令ntに基づき列車速度を減少させる電気ブレーキ及び空気ブレーキからなるブレーキ装置35と、ブレーキ装置35が発生する減速力を推定する減速力推定部(ブレーキモデル)37a及び列車の減速度を演算する減速度演算部(車体逆モデル)37bを有しており、これら減速力及び減速度に基づき外乱τd^を推定する外乱推定器37とを備え、減速力推定部は、電気ブレーキと空気ブレーキの動作状態に応じてブレーキ装置35のパラメータを調整する。
(もっと読む)
車載バッテリ充電支援装置、車載バッテリ充電支援方法及びコンピュータプログラム
【課題】充電された電気エネルギを無駄に放電することなく車載バッテリへと充電することを可能とした車載バッテリ充電支援装置、車載バッテリ充電支援方法及びコンピュータプログラムを提供する。
【解決手段】過去の車両2の発電ユニット20によるバッテリ7の充電履歴に基づいて、次回に車両2が走行を開始することに起因して始動するエンジン4の駆動に基づく発電ユニット20による充電エネルギ量の予測値を取得するとともに(S32)、過去の車両2の回生ブレーキユニット19によるバッテリ7の充電履歴に基づいて、次回に車両2が走行を開始した後の車両2の走行に基づく回生ブレーキユニット19による充電エネルギ量の予測値を取得し(S34)、取得した各予測値に基づいて、目標充電エネルギ量Enを算出する(S36)ように構成する。
(もっと読む)
61 - 80 / 389
[ Back to top ]