
Fターム[5H115TO07]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 勾配検出 (389)
Fターム[5H115TO07]に分類される特許
121 - 140 / 389
ナビゲーション装置及び電気自動車のナビゲーション方法
【課題】駆動用モータの温度上昇をより確実に抑制するように経路を設定できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置11の情報処理装置12は、探索した目的地までの経路に従って電気自動車1が走行する場合について駆動用モータ3の温度変化を推定し、駆動用モータ3の温度が当該モータ3の性能が劣化するレベルまで上昇しないように経路を変更する。具体的には、各リンクについて設定されるリンクコストとリンクコスト係数とに基づきリンクコストの積算値を計算し、そのリンクコストの積算値を最小にする経路を探索する。また、各リンクについて設定した温度コストと温度コスト係数とに基づいて温度コストの積算値も計算し、その温度コストが駆動用モータ3の性能が劣化する温度に対応して設定される性能劣化閾値を超えないように経路を変更する。
(もっと読む)
走行装置及びその制御方法

【課題】より安定的な走行制御を行うことができる走行装置及びその制御方法を提供すること。
【解決手段】走行装置10は、周辺の走行環境情報を検出する環境情報検出手段5と、搭乗者により行われた走行操作情報を取得する操作情報取得手段6と、環境情報検出手段6により検出された走行環境情報に基づいて、所定時間後までに生じる外乱情報を推定する外乱情報推定手段41と、操作情報取得手段6により取得された走行操作情報と、外乱情報推定手段41により推定された外乱情報に基づいて、制御指令値を生成する制御指令値生成手段42と、制御指令値生成手段42により生成された制御指令値に基づいて、車輪の駆動を制御して倒立制御を行う倒立制御手段44と、を備えている。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置において、登坂路又は降坂路にて運転者に違和感を与えることなくEV発進すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びにいずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。IN又はOUT接続状態にて登坂路(降坂路)でEV発進する場合、ブレーキ操作対応制動力の付与終了(t2)からM/G駆動トルクの付与開始(t3)までの間(制動力もM/G駆動トルクも付与されない期間)に亘ってE/G駆動(回生)トルクが駆動輪に付与される。登坂路での「発進前の一時的な後進」、並びに降坂路での「発進直後の車速の急激な増大」が抑制される。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】後進走行への登坂路で車両が略停止したときに登坂しやすくする。
【解決手段】後進方向への登坂路でシフトポジションがRポジションのときに第2モータから下限トルクTlimを出力すると共に車両が略停止する状態になったときには、第2モータからのトルクを増加(絶対値としては減少)させてから下限トルクTlimまで減少(絶対としては増加)させるのを車速Vが停止判定車速Vrefに値−1を乗じたもの以下となる条件を含む所定の解除条件が成立するまで繰り返し行なうトルク減増制御を実行し(S220〜S320)、第2モータのトルク減増制御を実行している最中に第2モータからのトルクが下限トルクTlimに至る最適タイミングtmgでモータMG1からの目標トルクTm1tgによるエンジンのモータリングによって駆動軸としてのリングギヤ軸に対応トルクを作用させる(S190,S200,S330,S340)。
(もっと読む)
エネルギ効率の高い自動車
【課題】アクセル踏み込み量に対応する動力を必要としない状況で燃料又はエネルギの無駄な消費を防止することができ、エネルギ効率を高めることができる自動車を提供する。
【解決手段】 エンジン1は、アクセル踏み込み量に対応して開度が制御される電子制御式のスロットルバルブ15を備えている。エンジン1は、さらに、アクセルセンサ31と、スロットルバルブ15を開閉するアクチュエータ16と、コントローラ30とを備えている。コントローラ30は、アクセル踏み込み量に対応するスロットル目標開度を演算し、スロットル目標開度に対応する連続的な制御信号をアクチュエータ16に出力する。さらに、コントローラ30は、自動車又はエンジン1がスロットル目標開度に対応するエンジン動力を必要としない走行環境又は運転状態では、スロットル制御信号をパルス制御信号に変換してアクチュエータ16に出力する。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置であって、車両発進時に使用される電動機接続状態を適切に選択し得るものの提供。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、及び、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」に選択可能な切替機構を備える。車両が走行状態から停止状態に移行した後において停止状態から車両が発進する場合、停止状態(路面勾配、前後加速度、路面摩擦係数、積載量等)、又は、停止状態に移行する前の走行状態(走行抵抗トルク等)に応じて、発進時の電動機接続状態が選択される。停止状態、又は停止状態に移行する前の走行状態に応じて、要求(或いは、許容)される駆動トルクの大きさに応じた適切な発進時の電動機続状態が選択され得る。
(もっと読む)
車両制御装置
【課題】副駆動源であるモータに交流電流を供給するインバータにおいて無駄に消費される電力を低減することのできる車両制御装置を提供する。
【解決手段】ハイブリッドコントロールコンピュータ100が制御する車両は、主駆動源として前輪20L,20Rを駆動するハイブリッドシステム200を搭載しているとともに、副駆動源として同ハイブリッドシステム200によって駆動されない後輪30L,30Rを必要に応じて駆動するシンクロナスリラクタンスモータ300を搭載している。ハイブリッドコントロールコンピュータ100は、車両走行中であっても、後輪30L,30Rを駆動する必要がない状態のときに後輪駆動用インバータ530への給電を停止する。
(もっと読む)
車両システム
【課題】 駆動源として内燃機関およびモータを備える車両の内燃機関を停止した停車状態からの発進時にモータのみを駆動して走行する走行モードを有する車両システムにおける前記発進時の駆動力の不足を的確かつ速やかに判定し、内燃機関を始動させることができるようにする。
【解決手段】 車両システムは、前記モータから出力された駆動力を変速機入力軸に伝達する流体クラッチと、車両状態に応じて前記モータ走行モードを選択し、前記モータの駆動を開始し、前記モータの駆動後、所定の時間以上経過しても、前記変速機の入力軸回転数が所定値を超えない場合は、前記内燃機関を始動する制御部と、を備える。
(もっと読む)
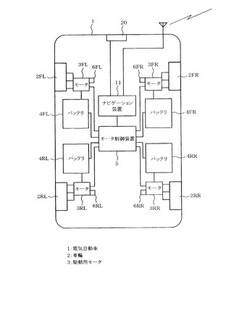
ナビゲーション装置,電気自動車の駆動用モータ制御システム及び駆動用モータの制御方法
【課題】特定の駆動用モータが過剰に発熱することを回避できるように電気自動車を走行させる。
【解決手段】4つの車輪2のそれぞれに駆動用モータ3が配置される電気自動車1に、各駆動用モータ3を個別に制御するモータ制御装置35と、このモータ制御装置35とモータ制御方法決定装置5を介して通信可能なナビゲーション装置11を搭載し、ナビゲーション装置11の情報処理装置12は、設定された目的地までの案内経路を探索すると、その案内経路について、電気自動車1が走行する際に各駆動用モータ3の温度上昇レベルが上限値を超えないよう駆動用モータ3の個別の使用計画を生成する。モータ制御方法決定装置5が上記使用計画に基づいて駆動用モータ3の制御方法を決定すると、モータ制御装置35は、上記制御方法に従う制御情報に基づいて各駆動用モータ3を制御する。
(もっと読む)
車両
【課題】回路構成が複雑でなく、位相差信号に対する応答性が良好で、かつ、熱により信号変動が小さいモーター制御回路を提供する。
【解決手段】モーターの回転制御回路において、前記モーターのPWM制御回路と、前記モーターの回転速度センサと、基準信号発生回路10と、位相比較回路と、前記モーターの検出回転速度信号を分周する分周器とを備え、この分周器からの信号と前記基準信号に基づく信号との位相差を位相比較器で求め、この位相差信号を前記PWM制御回路に供給するように構成した。
(もっと読む)
車両制御装置
【課題】車両制御装置において、エンジンと発電用回転電機と走行用回転電機の間で動力分配を行なう車両について、坂道後進を十分に行うことを可能とすることである。
【解決手段】エンジン28と、回転電機24,26と、動力分配機構30とを含む車両制御システム8における車両制御装置40は、車両の傾斜度θを取得する傾斜度取得処理部42と、シフトポジションを取得するシフトポジション取得処理部44と、蓄電装置12のSOC値を取得するSOC取得処理部46と、シフトポジションが後進レンジであるRレンジであって、傾斜度θが予め定めた傾斜度閾値θth以上のときに、充電開始SOC値と充電終了SOC値とをそれぞれ通常の場合よりも低い値に設定変更するSOC閾値変更処理部50とを含んで構成される。
(もっと読む)
車両
【課題】車体傾斜状態の計測値と推定値とを比較することによって、車体傾斜状態の計測値の異常を確実に検出することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の鉛直軸に対する傾斜角を計測する傾斜計測手段と、前記駆動輪12の回転状態及び前記駆動トルクによって前記傾斜角を推定する傾斜推定手段と、前記傾斜計測手段によって計測された傾斜角と前記傾斜推定手段によって推定された傾斜角との差の絶対値が所定値より大きい場合に前記傾斜計測手段によって計測された傾斜角が異常であると判定する判定手段と、を備える。
(もっと読む)
車両
【課題】車体の降車方向傾斜確率を算出し、その値によって車体の傾斜方向を予測するとともに、転倒防止装置の実行を禁止する禁止手段を備え、降車方向への車体傾斜を予測した場合には転倒防止装置の実行をあらかじめ禁止状態にしておくことにより、車体傾斜方向の予測に基づく的確な判断で必要な場合にのみ確実に転倒防止装置を作動させることができ、転倒防止装置の不要な作動によって使用者が余分な時間と費用を要することがなく、かつ、車体固定式片側ストッパのみで十分な安全性を保障可能な倒立型の車両を実現することができるようにする。
【解決手段】車両制御装置は、車体の姿勢の制御の停止時に車体が傾斜する方向を予測する傾斜方向予測手段と、傾斜方向予測手段が予測した車体が傾斜する方向に基づいて転倒防止装置の実行を禁止する禁止手段とを備える。
(もっと読む)
電動車両の制振制御装置
【課題】車両重量や走行抵抗の変動に起因する定常的な外乱により生じる不要な加速度変動を抑制する。
【解決手段】動力源にモータ/ジェネレータを有するFRハイブリッド車両において、駆動トルクからモータ回転速度を推定するモータ回転速度推定部102aと、モータ回転速度を検出するレゾルバと、モータ回転速度推定値ωm#とモータ回転速度検出値ωmの偏差ω_errから外乱を推定する外乱推定部102cと、車両の振動成分を抽出して振動を抑制するための第2トルク目標値Tm*2を算出する第2トルク目標値演算手段102と、モータ回転速度擬似値ωm_susを算出する擬似モータ回転速度演算部102dと、を備える。そして、外乱推定部102cは、制振制御を開始する前の制振制御停止中、モータ回転速度検出値ωmに代え、モータ回転速度検出値擬似値ωm_susを用いて外乱を推定する。
(もっと読む)
列車制御信号の電文構造及び列車速度制御方法
【課題】先行列車位置や進路開通等により変化する変化情報を地上から列車に確実に伝送することができるとともに、線路改修等により固定情報が変更になった場合でも、簡単に固定情報を変更して容易に確認できるようにする。
【解決手段】列車制御信号の電文20を、先行列車の位置や進路開通等により変化する変化情報からなる必要最小列車制御電文21と、線路勾配や曲線半径等の列車間隔をより短くする上で有効な固定情報からなる最適列車制御電文22とで構成し、最適列車制御電文22を複数に分割し、必要最小列車制御電文21毎に分割した最適列車制御電文22とその識別情報を付加して列車に送信する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】坂道発進時のロールバック量を低減可能なハイブリッド車両の制御装置を提供すること。
【解決手段】発進時に、第1クラッチCL1を解放してモータジェネレータMGの駆動力で発進するとともに、第1クラッチCL1を締結させて、エンジンEngをクランキングさせる発進制御を実行する統合コントローラ14を備えたハイブリッド車の制御装置であって、走行路面の勾配を検出する路面傾斜角度センサ30を備え、統合コントローラ14は、発進制御時に、勾配が大きいときには、勾配が小さなときに対しクランキングトルクが小さくなるよう第1クラッチCL1のトルク容量を制御することを特徴とするハイブリッド車の制御装置とした。
(もっと読む)
個人用移動車両及び方法
【課題】でこぼこな表面を有する地面上で人(10)を運ぶための一種の運搬用車両。
【構成】ユーザを含むペイロードを運ぶための車両であって、
a.前記ユーザを支持する台と、
b.前記台に据え付けられ、基礎をなす表面上の望ましい動作で前記ユーザを進める地面接地モジュールと、
c.装置上にユーザが存在するかを決定するための近接センサと、
d.前記近接センサが装置上にユーザの存在を決定しなかったならば、前記地面接地モジュールの操作を阻止するための近接検出器に接続される安全スイッチと、
を備えることを特徴とする車両。
(もっと読む)
電源装置および電源装置の制御方法
【課題】モータが力行状態・回生状態を頻繁に繰り返す場合であっても、電力変換装置が備えるコンデンサの充放電電流による損失の増大を抑制する。
【解決手段】回生状態から力行状態への移行時、車両の走行環境と走行履歴とに基づいて、第1および第2の電源の電気的接続状態を直列接続のままで固定とする直列固定処理を行う。
(もっと読む)
電動機の制御装置
【課題】2重回転子を有する電動機を走行駆動源として備える車両が牽引されるとき、当該電動機を界磁弱め状態に設定可能な電動機の制御装置を提供すること。
【解決手段】 回転軸の周囲に同心円状に設けられた第1回転子及び第2回転子と、第1回転子及び第2回転子の周方向の相対変位角を変更する位相変更機構と、を有し、車両の駆動軸又は駆動輪に直接連結された永久磁石界磁型の電動機の制御装置は、位相変更機構を駆動する位相変更機構駆動部と、車両が被牽引状態か否かを判断する被牽引状態判断部と、被牽引状態判断部によって車両が被牽引状態であると判断されたとき、相対変位角を第1回転子及び第2回転子による合成磁束が最も弱められる角度とする指令を位相変更機構駆動部に行う位相指令部とを備える。
(もっと読む)
車両
【課題】車両の走行速度に依らず、いつ倒立制御を停止しても車体を安定した状態に維持することを可能とし、異常時における緊急停止に即時に対応することができ、高い走行性能や利便性を備え、かつ、安全に使用することができるようにとする。高い走行性能や利便性を備え、且つ、安全に使用することができるようにする。
【解決手段】車両制御装置は、車両の走行速度に応じて減速度の時間変化を予測する減速度予測手段と、減速度予測手段によって予測された減速度の時間変化に応じて、前記姿勢制限手段の位置や形状を制御する姿勢制限制御手段とを備える。
(もっと読む)
121 - 140 / 389
[ Back to top ]