
Fターム[5H115TO07]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 勾配検出 (389)
Fターム[5H115TO07]に分類される特許
21 - 40 / 389
電動車の走行制御装置、および電動車
【課題】離席時制御による安全性向上を図りつつ、誤って離席が検知された場合に確実に車両を停止させることができる走行制御装置および電動車を提供する。
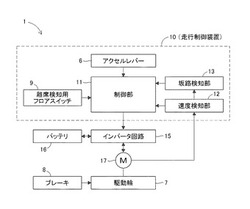
【解決手段】本発明に係る走行制御装置10は、目標速度を指令するための速度指令手段6と、車両速度を検知する速度検知部12と、車両速度が目標速度に一致するように走行用モータ17を制御する制御部11とを備えた走行制御装置において、オペレータが離席しているか否かを検知する離席検知部9と、走行路が坂路であるか否かを検知する坂路検知部13とをさらに備え、制御部11は、オペレータが離席していること、および走行路が坂路であることが検知された場合は目標速度をゼロとし、オペレータが離席していること、および走行路が坂路ではないことが検知された場合は目標速度を予め定められた微小速度として走行用モータ17を制御する。
(もっと読む)
車両制御装置

【課題】下り勾配路途中で停止する場合でも回生エネルギを高効率に回収できる車両制御装置を提供することを課題とする。
【解決手段】勾配路情報から予測される回生エネルギ量に応じて下り勾配路走行前に車両でエネルギを消費する機器を駆動制御する車両制御装置であって、下り勾配路途中での車両の停止情報を取得する停止情報取得手段と、その停止情報に基づいて下り勾配路途中で車両が停止すると判断した場合、下り勾配路途中での車両の停止に応じて回収可能と予測される回生エネルギ量と下り勾配路途中での停止時間中に車両で消費すると予測されるエネルギ量の少なくとも一方に基づいて下り勾配路走行前にバッテリで消費する電力量を決定し、その電力量を消費するように車両の機器を駆動制御する制御手段とを備えることを特徴とする。
(もっと読む)
列車制御装置
【課題】自動で走行試験用のノッチパターンに従って制御指令を出力することで正確なステップ応答データを得られる列車制御装置を提供する。
【解決手段】列車制御装置は、速度検出手段と、位置検出手段と、受信手段と、第1の出力手段と、特定手段と、第2の出力手段と、出力切換手段とを備える。前記第1の出力手段は、前記受信手段で受信された信号現示速度情報に基づいて、前記列車が駅間を走行し停止目標位置に停止するような第1制御指令を出力する。前記特定手段は、前記位置検出手段で検出された位置情報に基づいて、駅間における指定の距離範囲を特定する。前記第2の出力手段は、前記特定手段により特定された指定の距離範囲において、所定のノッチパターンに従って第2制御指令を出力する。前記出力切換手段は、前記第2の出力手段の第2制御指令及び、前記第1の出力手段の第1制御指令の出力中、前記第2制御指令を優先する。
(もっと読む)
ハイブリッド自動車
【課題】後進登坂路を後進走行するときに車両が停止したときに、電動機を駆動する電動機用インバータの特定のスイッチング素子への電流の集中を抑制すると共に登坂しやすくする。
【解決手段】後進登坂路を後進走行するときに車両が段差のために停止している段差停止状態であるときには、所定時間trefが経過するまでは、モータを駆動するインバータの複数のトランジスタのうち特定のトランジスタへの電流の集中を抑制する際のモータからのトルクの減少率(図中、破線)より大きな所定トルク減少率ΔTを用いてモータのトルク指令Tm2*を設定してモータのトルクを大きく減少させ、所定時間trefが経過したとき以降は、後進走行制御を実行する。
(もっと読む)
電動車両
【課題】再始動時において安定したトルク出力を得ることができる電動車両を提供する。
【解決手段】車両駆動用のモータで走行する電動車両1において、モータ2の作動中にモータ2の停止条件が成立した場合にはモータ2を自動的に停止させると共に、停止条件が解除された場合にモータ2を再始動させるモータコントロール部10と、停止条件が解除されてから所定時間までのモータ2の回転速度を積算して積算値を算出し、積算値に基づいて路面の傾斜状態を判定する路面傾斜判定部12とを備える。
(もっと読む)
車両
【課題】1つの駆動源を用いて駆動タイヤとサスペンションのそれぞれを作動させることができる車両。
【解決手段】駆動源8と、駆動源8から出力される駆動力によって回転可能な駆動輪3と、駆動源8から出力される駆動力によって作動するサスペンション7と、駆動源8と、駆動輪3またはサスペンション7との接続を切り替える切替え手段23とを有する走行装置4を備える車両を提供する。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、前記走行モード中に車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から低下させて前記モータの実トルク変化に応じた補正後指令油圧を設定し、該補正後指令油圧を出力する前に前記補正後指令油圧よりも高いプリチャージ指令油圧を出力する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 クラッチをスリップ制御すると共に、クラッチのモータ側回転数がクラッチの駆動輪側回転数よりも所定量高い回転数となるようにモータを回転数制御するモータ回転数制御走行モードと、クラッチをスリップ制御すると共に、前記クラッチのモータ側回転数が前記クラッチの駆動輪側回転数よりも所定量高い回転数となるようにエンジンを回転数制御するエンジン回転数制御走行モードと、クラッチをスリップ制御しているときに車両停止状態と判定されたときは、指令油圧を低下させる車両停止時伝達トルク容量補正手段と、モータ回転数制御走行モードのときは、車両停止時伝達トルク容量補正手段による指令油圧の低下を許可し、エンジン回転数制御走行モードのときは、前記車両停止時伝達トルク容量補正手段による指令油圧の低下を禁止する補正許可・禁止判断手段と、を備えた。
(もっと読む)
燃料電池システム
【課題】安定した運用が行える燃料電池システムを提供することを課題とする。
【解決手段】制御部が、燃料電池システムの停止後監視時又は起動時に、キャッチタンク27に設けられた水位センサ27a又は27bによって検出又は推定された水位が所定の基準水位以上であると判定した場合に、ドレイン弁26を開の状態に切り替えてキャッチタンク27に貯留された水を排出させることを特徴とする。また、キャッチタンク27が角度θだけ傾斜した場合には、傾斜角度θに応じて補正後水排出基準水位及び補正後水位を求めて前記判定を行う。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
車両の制御装置
【課題】 クラッチの耐久性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド時に、クラッチを開放し、ブレーキによって車両停止状態を維持する締結要素保護制御の介入条件を、勾配負荷トルク相当値に基づいて設定する一方、締結要素保護制御の解除条件を、介入時の要求トルクに基づいて設定することとした。
(もっと読む)
前後輪駆動車両
【課題】車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
(もっと読む)
ハイブリッド車両の駆動力制御装置
【課題】駆動力段差の発生を抑制するに好適なハイブリッド車両の駆動力制御装置を提供する。
【解決手段】加速意図としてアクセル開速度ΔAPOを用い、アクセル開速度ΔAPOが第一閾値未満の低速度であるときは、実アクセル開度に対して小さい値となるような遅開き特性βにより修正した制御用アクセル開度に基づき、駆動力の決定と走行モードを切り替える。また、アクセル開速度ΔAPOが第一閾値及び第一閾値よりも大きい値に設定した第二閾値以上である時は、実アクセル開度に対して前記遅開き特性βよりも大きくなる早開き特性αにより修正した制御用アクセル開度に基づき、駆動力の決定と走行モードを切り替える。また、アクセル開速度ΔAPOが第一閾値と第二閾値の間であれば、前記遅開き特性βと早開き特性αとの中間特性となるような開度特性に基づき、駆動力の決定と走行モードを切り替えるようにした。
(もっと読む)
車両の制御装置
【課題】 運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 アクセルヒルホールド状態と判定されたときは、車輪に機械的制動トルクを付与すると共に、駆動源と駆動輪の間のクラッチの締結トルクの出力を減少させる締結要素保護制御を実行する。このとき、機械的制動トルクの増加勾配を、路面勾配が大きい程大きな増加勾配に設定することとした。
(もっと読む)
車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
電動車両の制御装置
【課題】モータジェネレータと駆動輪との間に設けられた締結要素のスリップ締結とロックアップとのハンチングの発生を抑制できる電動車両の制御装置を提供することこと。
【解決手段】車体速に対応したロックアップ判定閾値に基づいて、車体速がロックアップ判定閾値を越えると、第2クラッチをロックアップ状態とし、車体速がロックアップ判定閾値以下で、第2クラッチをスリップ締結状態とする締結要素制御部を備え、ロックアップ判定閾値としてのTCS時第1切替線L1tcsは、車体速がVset1以下の低速の領域では、車体速がVset2以上の高速の領域に比べて高く設定されていることを特徴とする電動車両の制御装置とした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジンアイドル時の振動や音を抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】 第1締結要素が解放されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンの燃費を高める第1目標アイドル回転数に設定し、第1締結要素が締結されているときには、エンジンのアイドル時の目標エンジン回転数をエンジンによる共振を抑制する第2目標アイドル回転数に設定するようにした。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの始動停止の頻度を低減することにより、乗員に与える違和感を低減する。
【解決手段】統合コントローラ10は、アクセル開度APOが予め設定されたエンジン停止判定値APO1以下であることをアクセルオフとして判定し、このアクセルオフの判定タイミングを起点としてエンジン停止開始タイミングを設定する。この場合、統合コントローラ10は、勾配路であると判定された場合に設定するエンジン停止開始タイミングを、勾配路でないと判定された場合に設定するエンジン停止開始タイミングよりも遅くしている。
(もっと読む)
電動車両の制御装置
【課題】クリープトルク制御中、車両が走行を開始してもクリープトルクの変動を抑えることで、走行フィーリングの悪化を防止する。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータと、車両停止判定手段と、補正用勾配演算手段と、目標クリープトルク演算手段と、を備える。モータジェネレータは、アクセル足離し操作時にタイヤに付与するクリープトルクを制御する。補正用勾配演算手段は、車両停止が判定されたとき、停止判定時の推定勾配をクリープトルクの補正用勾配として保存し、車両停止から走行へ移行しても所定時間を経過するまでは保存した補正用勾配の値を固定する。目標クリープトルク演算手段は、車速に基づく基本クリープトルクに、補正用勾配に基づく登坂時クリープトルク補正係数を掛け合わせることで目標クリープトルクを演算する。
(もっと読む)
21 - 40 / 389
[ Back to top ]