
Fターム[5H115TO26]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 機械的ブレーキの流体圧力 (157)
Fターム[5H115TO26]に分類される特許
1 - 20 / 157
ハイブリッド車両の制御装置
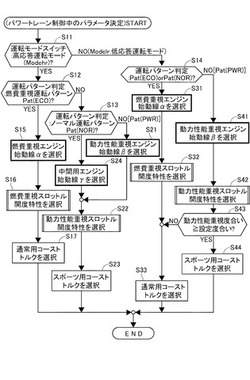
【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
車両用制動装置

【課題】ビルドアップ制御を行う車両制動装置において、ビルドアップによる制動力を適切に設定する。
【解決手段】モータ駆動シリンダ8と、ペダルストロークセンサ11aと、ディスクブレーキ3と、制御ユニット6とを有するブレーキ装置であって、ブレーキ液圧を検出する液圧センサ16を有し、制御ユニットが、ブレーキペダル操作量の変化量に応じて、通常マップと、ビルドアップマップとのいずれかを選択し、ブレーキペダル操作量に基づいて選択したマップを参照し、ブレーキ液圧規範値を設定するブレーキ液圧規範値設定部23と、ブレーキ液圧規範値とブレーキ液圧との差に基づいてブレーキ液圧規範値を補正する補正値設定部25および加算器26と、補正されたブレーキ液圧規範値に応じて目標値を設定するストローク目標値設定部28とを有する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御中にABS制御が介入したとき、制御干渉の防止と、制御再介入の頻度抑制と、回生エネルギー量確保の実効と、を併せて達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、液圧制動手段であるブレーキ液圧発生装置1と、回生量制御手段であるモータコントローラ8と、回生協調ブレーキ制御手段である統合コントローラ9と、ABS制御手段であるブレーキコントローラ7と、を備える。統合コントローラ9は、回生協調ブレーキ制御中にABS制御が介入したとき、ABS制御介入中は回生制動要求を停止し、ABS制御が非作動状態へ移行すると、前回のABS制御介入時の回生量を超えない値に制限した回生量を今回の回生量リミッタとする制限付き回生制動要求による回生協調ブレーキ制御に復帰するABS介入時回生協調ブレーキ制御を行う(図3)。
(もっと読む)
自動車
【課題】停車中に押し当てトルクの出力と出力の解除とが頻繁に繰り返されるのを抑制する。
【解決手段】エンジンの回転数Neが値0を超えてエンジンの運転中あるいは始動時,停止時にある場合には(S310)、ブレーキ圧Pbが閾値Pref以上のときに押し当てトルクTpに所定トルクTsetを設定して押し当て制御を実行し(S360,370)、押し当て制御の実行中にブレーキ圧Pbが閾値Pref未満となったときに押し当て制御を解除して実行を制限し(S400〜420)、実行制限した以降所定時間Trefが経過するまではブレーキ圧Pbが閾値(Pref+α)以上となったときに押し当てトルクTpに所定トルクTsetを再設定して押し当て制御を再実行するから(S340,380,390)、押し当て制御の実行と解除とが頻繁に繰り返されるのを抑制することができる。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】発熱量が低減されたハイブリッド車両を提供する。
【解決手段】ハイブリッド車両100は、エンジン24の動力を受けて発電するジェネレータMG1と、車輪を駆動させるモータMG2と、エンジン24、ジェネレータMG1、モータMG2の各軸に結合された動力分割機構と、モータMG2を駆動するインバータ36を冷却する冷却装置49と、ブレーキシステム46とを備える。制御装置は、車両が停車中にエンジン24を用いてジェネレータMG1によって発電を行なう場合には、エンジン24がジェネレータMG1を回転させる際に車輪に伝達されるトルクに対抗するために、ブレーキシステム46を使用して車輪を固定する第1の処理と、モータMG2を使用してキャンセルトルクを発生する第2の処理とを、温度センサ55で検出される冷却媒体の温度に応じて切り替える。
(もっと読む)
ハイブリッド自動車
【課題】駆動軸の回転数に急変が生じるものとしても、二次電池が過大な電力により充放電するのを抑制する。
【解決手段】低μ路の路面上を走行するなどアクセルペダルの踏み込みにより駆動輪にスリップが生じその後アクセルペダルの踏み込みを維持しながらブレーキペダルの踏み込みによりスリップしている駆動輪をグリップさせた両踏みグリップ状態を判定し、両踏みグリップ状態でないときには要求パワーPeをエンジンから効率良く出力するための目標運転ポイントでエンジンを運転すると共に要求トルクを駆動軸に出力するために設定されたモータMG1のトルク指令Tm1*を実行トルクT1*に設定してモータMG1を駆動制御し、両踏みグリップ状態であるときには実行トルクT1*に値0を設定することによりモータMG1のトルクを制限する。
(もっと読む)
ハイブリッド自動車
【課題】目標エンジン回転数に基づく第1電動機の目標回転数と当該第1電動機の回転数との差がなくなるように目標トルクを設定すると共に当該目標トルクに応じたトルクを出力するように第1電動機を制御する際に、ねじれ要素の共振による影響を良好に低減して内燃機関の回転数を目標エンジン回転数に良好に近づける。
【解決手段】エンジン22が運転されるときに目標回転数Ne*に基づくモータMG1の目標回転数Nm1*とフィルタによりダンパ28の共振による影響成分が除去されたモータMG1の制御用回転数Nm1cとの差がなくなるようにモータMG1のトルク指令Tm1*が設定され、トルク指令Tm1*に応じたトルクを出力するようにモータMG1が制御される。そして、フィルタは、ダンパ28に接続されるマスの大きさに応じてモータMG1の回転数から除去されるカット周波数帯fcの成分を異ならせるように構成される。
(もっと読む)
電気自動車
【課題】アクセルオフに伴って車両に制動力を付与するときに、バッテリが所定蓄電割合を超えて充電される状態が継続するのを抑制する。
【解決手段】アクセルオフに伴って車両に制動力を付与するとき、蓄電割合SOCが所定割合SOCref以上となると共に蓄電割合SOCの時間変化率kが値0を超えているときには(S100)、要求トルクTr*からモータ駆動トルクTmref(正の値)を減じたものをブレーキトルクTb*に設定して、設定したブレーキトルクTb*(制動力)が電気自動車に付与されるように油圧ブレーキ装置を制御し(S110)、その後、トルク指令Tm*にモータ駆動トルクTmrefを設定すると共に設定したトルク指令Tm*でモータが駆動するようインバータやバッテリの電圧を昇圧する昇圧コンバータを制御する(S120)。
(もっと読む)
電動車両
【課題】再始動時において安定したトルク出力を得ることができる電動車両を提供する。
【解決手段】車両駆動用のモータで走行する電動車両1において、モータ2の作動中にモータ2の停止条件が成立した場合にはモータ2を自動的に停止させると共に、停止条件が解除された場合にモータ2を再始動させるモータコントロール部10と、停止条件が解除されてから所定時間までのモータ2の回転速度を積算して積算値を算出し、積算値に基づいて路面の傾斜状態を判定する路面傾斜判定部12とを備える。
(もっと読む)
ハイブリッド自動車
【課題】制動時にバッテリにより多くのエネルギを充電できるようにする。
【解決手段】車速Vが高いほど長くなる傾向でブレーキペダルポジションBPが大きいほど短くなる傾向でアクセル開度Accが大きいほど長くなる傾向に、バッテリが充電される際の充電継続時間Tchの予測値としての予測充電継続時間Tchprを設定し(S310)、設定した予測充電継続時間Tchprが短いほど制限が緩くなる傾向にバッテリの入力制限Winを設定する(S320)。そして、設定したバッテリの入力制限Winと出力制限Woutとの範囲内で要求トルクに基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置
【課題】演算に必要な構成の簡略化が可能なハイブリッド車両の制御装置を提供すること。
【解決手段】アクセル開度と自動変速機3の入力回転毎に設定されたエンジン用の目標定常トルクマップとモータジェネレータ用のアシストトルクマップとを備え、これら2つのトルクマップの合計を車両の目標駆動トルクとする演算を行う統合コントローラ20を備えたハイブリッド車両の制御装置であって、統合コントローラ20は、エンジン効率とモータ効率を合わせたシステム効率が最適となるトルクを基準として設定した最適発電トルクマップとアシストトルクマップとを1つのマップとしたアシスト・発電統合トルクマップを備え、このアシスト・発電統合トルクマップを用いてアシストトルクおよび発電トルクを演算するとともに、アシストトルクを演算する場合は0トルクで下限制限し、前記発電トルクを演算するときは0トルクを上限制限するようにした。
(もっと読む)
ハイブリッド車両の制御装置自動車の発電制御
【課題】強制発電モードでありかつ減速コースト運転中である場合において特定の条件ではエンジンをフュエルカットすることとして燃費を向上させる。
【解決手段】強制発電モードでありかつ減速コースト運転中であると判定された場合に、エンジンをフュエルカットしたときバッテリから放電されるフュエルカット時バッテリ放電条件であるのか、それともエンジンをフュエルカットしたときバッテリに充電されるフュエルカット時バッテリ充電条件であるのかを判定し(S3)と、この判定結果よりフュエルカット時バッテリ放電条件であると判定された場合に作動状態のエンジンでモータジェネレータを連れ回しての発電を行わせ(S7、S8)、フュエルカット時バッテリ充電条件であると判定された場合にエンジンをフュエルカットする(S5、S6)。
(もっと読む)
車両の制動制御装置
【課題】 回生協調制御中にニュートラルレンジが選択された際のショックを抑制できる車両の制動制御装置を提供する。
【解決手段】 モータジェネレータMGおよび左右後輪RL,RR間に自動変速機ATを介在させ、車輪に摩擦制動トルクを付与するブレーキユニットBUと、モータジェネレータMGによる回生制動トルクと摩擦制動トルクとの和が車両の要求制動トルクとなるように回生制動トルクおよび摩擦制動トルクを制御する統合コントローラ10を備えた車両の制動制御装置において、統合コントローラ10は、自動変速機ATのマニュアルバルブからの油圧抜けが検出された場合、当該油圧抜けの速度に応じて回生制動トルクを低下させる。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
電動車両の制動装置
【課題】電池が満充電状態であっても回生制動装置の発生する制動力が制限されない電動車両の制動装置を提供する。
【解決手段】回生制動装置に付随して抵抗器を具備し、発生する電力が電池等の充電で消費される電力を上回る場合に、ブレーキペダルの踏力を検知した信号と電池等の充電による通電電流の比較により、抵抗器を接続するリレーを開閉する、または抵抗器を接続するチョッパ装置のデューティ比を加減するなど抵抗器に通電する制御を行う。また抵抗器の通電は大きな発熱を伴うので、回生制動装置の発生する電力の一部を使用して抵抗器の冷却を図り、装置を保護する。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキブースタにおけるエネルギ損失を低減しつつ回生制動力を最大限活用して総合的に高いエネルギ効率を達成した車両用ブレーキ装置を提供する。
【解決手段】ブースタ部を有する液圧ブレーキ装置と回生ブレーキ装置とを備える車両用ブレーキ装置において、ブースタ部は出力部材とブースタ室と圧力源と弁機構97とを有して構成され、弁機構97は、駆動圧入力ポート971とブースタ室接続ポート972とが形成されているブースタシリンダ(内側ピストン部材965)と、ブレーキ操作部材に連動してブースタシリンダ965内を摺動するブースタピストン(入力部材94)とを有し、ブレーキ操作部材の操作量が所定操作量Lに達するまではブースタ部が作動せず、ブレーキ操作部材の操作量が所定操作量Lを超えるとブースタ部が作動するように構成され、所定操作量Lは、回生ブレーキ装置による回生制動力の最大値に基づいて設定されている。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
ヒルスタートアシスト制御装置及びその制御方法
【課題】登坂路停車時において消費電力を抑えつつも車両の後退を防止することが可能なヒルスタートアシスト制御装置及びその制御方法を提供する。
【解決手段】ヒルスタートアシスト制御装置1は、登坂路停車時にブレーキペダルが戻されてもブレーキが掛かったままの状態で保持するものである。このヒルスタートアシスト制御装置1は、モータから発生するクリープトルクを低減させるクリープカット制御部25を備え、このクリープカット制御部25は、登坂路停車時にブレーキが戻された場合に、登坂路の路面勾配と戻される前のブレーキ力とに基づいて、クリープトルクの低減量を算出し、算出された低減量に基づいてクリープトルクを設定する。
(もっと読む)
1 - 20 / 157
[ Back to top ]