
Fターム[5H180LL02]の内容
Fターム[5H180LL02]に分類される特許
201 - 220 / 1,853
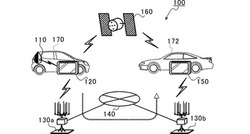
標識表示方法、車載システム、RFIDタグ、標識送信装置、および標識表示装置
【課題】 注意を払うべき車両の存在を容易かつ迅速に運転者に把握させ注意喚起することで、事故を回避させて安全性の向上を図ることを目的とする。
【解決手段】 本発明の車載システム100は、日本道路交通法に定められた標識に付設されたRFIDタグ110と、そのRFIDタグ110から情報を読み取り、高齢運転者が運転していること(標識情報)およびGPS衛星160により特定される車両170の位置(送信位置情報)を近辺の基地局130に送信する標識送信装置120と、近辺の基地局130を通じてそのような情報(標識情報、送信位置情報)を取得し、画面上の地図を用いて高齢運転者が運転している車両170の存在を運転者に報知する標識表示装置150とを備える。
(もっと読む)
車両用情報提示装置

【課題】車両が目的位置に到達するにあたり、到達までの時間を短縮することが可能な車両用情報提示装置を提供する。
【解決手段】車両用情報提示装置1は、車内の表示部60により画像を提示するものであって、自車両の位置を検出すると共に、目的位置を設定し、且つ、検出した自車両の位置から、設定した目的位置に到達するための最適経路を算出するナビゲーション装置20と、ナビゲーション装置20により算出された最適経路に対する自車両のズレ方向を算出すると共に、表示部60に表示させる画像を、算出したズレ方向とは逆方向に回転させる表示制御部50とを備えている。
(もっと読む)
走行状態検出装置及び運転支援装置
【課題】車線の減少状態を的確に検出し、車線変更方向を即時に判断することができる走行状態検出装置及び運転支援装置を提供する。
【解決手段】 運転支援装置1のECU6は、白線認識カメラ2により取得された白線画像から走行路の車線の情報を検出する車線情報検出部11と、車速センサ3及び横加速度センサ4の検出値に基づいて自車両の旋回Rを求める車両旋回状態検出部12と、車線情報検出部11及び車両旋回状態検出部12の検出結果に基づいて走行路の車線の減少状況を判定する車線状況判定部13と、車線状況判定部13の判定結果に基づいて車線変更すべき方向を判断する支援判断部14と、レーダ5の測定値に基づいて周辺車両の情報を取得する周辺車両情報取得部15と、支援判断部14及び周辺車両情報取得部15の処理結果に基づいて運転支援を制御する警報・支援制御部16とを備えている。
(もっと読む)
運転支援システム
【課題】運転者の道路規制に対する意識を考慮した運転支援を行うことができる運転支援システムを提供する。
【解決手段】運転支援システム1では、交差点Iに優先自車両Xpが進入する際、当該交差点Iで非優先自車両として過去に走行したときの走行履歴情報が参照され、道路規制遵守レベルが算出され、この道路規制遵守レベルが規定レベルを満たす場合に限り、路車間情報を用いた運転支援が実施される一方、規定レベルを満たさない場合、運転支援が実施されない。つまり、走行履歴情報に基づいて運転支援の支援態様が変更されている。ここで、道路規制意識は非優先自車両のときの走行履歴に強く反映されることから、上述のように走行履歴情報に基づき運転支援の支援態様を変更すると、道路規制意識を考慮した運転支援を行うことが可能となる。
(もっと読む)
キャリブレーション装置およびキャリブレーション方法
【課題】車両に搭載されている撮像装置の交換場所等に関する制限を軽減または解消しながら、撮像装置のキャリブレーションを実行しうる装置等を提供する。
【解決手段】第1状態において撮像された前方画像および後方画像に基づいて認識された前方および後方レーンマークのそれぞれの位置および姿勢が認識される。第2状態において撮像された前方画像および後方画像に基づいて認識された前方および後方レーンマークのそれぞれの位置および姿勢とが認識される。そして、当該認識結果に基づき、第2状態における前方カメラ11(または後方カメラ12)の光軸姿勢の変化態様が認識される。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
運転支援装置
【課題】運転者の見切り発進を抑制することができ、運転支援の安全性を一層向上させることができる運転支援装置を提供する。
【解決手段】インフラ情報受信部8は、交差点における自車線側の信号機Aが赤信号である場合に、交差道路側の信号機Bの表示状態を取得すると共に、発進促進部14は、交差道路側の信号機Bの表示状態に基づいて情報提供を行う。例えば、交差道路側の信号機Bが赤信号である場合は、運転者が見切り発進をしてしまう可能性が高いが、交差道路側の信号機Bが青信号の終わり際や黄色信号や矢灯器表示などのように、赤信号になる前にその旨を通知することにより、運転者に間もなく赤信号が終わることを理解させると共に自ら信号機Aを確認させて運転を行うようにすることで、見切り発進を助長することを防止する。
(もっと読む)
眠気判定装置及びプログラム
【課題】精度良く群発性瞬目を検出でき、精度よく眠気状態を判定することができるようにする。
【解決手段】抽出された瞬目の閉眼持続時間が所定時間(例えば1秒)以上となる区間における瞼開度の時系列データから、極大値及び極小値を求める。閉眼持続時間が1秒以上となる区間に複数の極小値が存在した場合には、求められた極大値から極小値に向かって、ある決まったステップずつ低い値にスライドさせていく要領で、可変閉眼閾値を設けながら、各可変閉眼閾値に対して、可変閉眼閾値を往復する瞬目を抽出し、瞬目間間隔を求める。求められた瞬目間間隔が1秒以下であって、例えば0.2秒以上であれば、群発性瞬目が起きたと判断し、群発性瞬目が検出される。
(もっと読む)
車両周囲監視装置
【課題】全周鳥瞰図画像における障害物検出を効率良く行う車両周辺監視装置を提供する。
【解決手段】車両に設置された第1撮像装置2a〜第4撮像装置2dは、撮像した画像をフレームバッファ10に記憶する。画像読出部12は、フレームバッファ10から読み出した各画像を画像処理部14に供給し、第2撮像装置2bおよび第4撮像装置2dで撮像された画像を移動量検出部16に供給する。画像処理部14は画像読出部12から受け取った各画像のそれぞれを鳥瞰図画像へ変換し、移動量検出部16から受け取った車両全体の動きベクトルに基づき、鳥瞰図画像に対して、車両の移動量を打ち消す変換を行い、これを障害物検出部18に供給する。移動量検出部16は、画像読出部12から受け取った画像に基づき、車両全体の動きベクトルを検出する。障害物検出部18は、画像処理部16から受け取った鳥瞰図画像の差分をとることで撮像装置2ごとに障害物を検出する。
(もっと読む)
車両制御装置
【課題】車両の安全を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両の前方の障害物との距離を検出する第一検出手段と、車両の右折又は左折の開始及び終了を検出する右左折検出手段5aと、車両の前方の所定領域を設定する所定領域設定手段5bと、右左折検出手段5aが車両の右折又は左折の開始を検出した場合に、第一検出手段が所定領域に指向するように、第一検出手段の車両の車体の前方に対する第一角度θ1を制御する第一角度制御手段5cとを含むことを特徴とする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自車両の前方にある道路区間における走行予想軌跡を、より実際の走行軌跡に近い走行予想軌跡として導出することができる技術を提供する。
【解決手段】自車両の周囲を走行する他車両の位置および車速を含む他車両情報を取得し、前記自車両の前方における道路の形状を示す道路形状情報を取得し、前記道路形状情報に基づいて前記道路に所定形状の区間が含まれるか否かを判定し、前記所定形状の区間が含まれる場合に、前記自車両の走行予想軌跡を取得し、前記自車両の走行予想軌跡が前記自車両の走行車線に隣接する隣接車線に最接近する最接近位置における前記自車両と前記他車両との接近度を前記他車両情報に基づいて推定し、前記接近度に応じた運転支援を行う。
(もっと読む)
運転支援装置
【課題】自車両が車線からはみ出すことを直感的に理解させて、同じ場所で同じ行動を取ってしまうことを確実に防止することのできる運転支援装置を提供する。
【解決手段】自車両が車線からはみ出す量を取得するはみ出し診断部12と、自車両に対して車線のはみ出しに対する注意喚起を行う表示器6や警報アクチュエータ7などを備え、自車両が車線からはみ出す量が大きいほど、注意喚起のレベルを高くする。はみ出し量の大きさに基づいてレベルを変化させて注意喚起を行うことができるため、運転者に対してどの程度車線からはみ出しているのかを直感的に理解させる。これによって、運転者に対して行き止まり感やつっかかり感などを与えることを可能とし、運転者が再度その道路を通行することを避けるようにする。
(もっと読む)
運転支援装置及び運転支援方法
【課題】自車両周囲を撮影した周辺画像に基づいて、ドライバが障害物を認識し、かつ自車両と障害物との位置関係を把握することを容易にする運転支援装置及び運転支援方法を提供する。
【解決手段】運転支援装置1は、車両10の周囲を撮影した周辺画像を取得する撮像部(2a〜2c)と、視点情報を複数記憶する記憶部52と、異なる視点に関する視点情報を順次取得する視点位置決定部522と、視点位置決定部522から視点情報を受け取る度に、撮像部(2a〜2c)により取得された周辺画像に対して、その視点情報に表される視点に基づいて視点変換処理を行うことにより、その視点から周辺画像に写っている領域を見た視点変換画像を作成する画像変換部533と、第1の視点から第2の視点まで、あるいはその逆の順序で、各視点情報に表される視点に基づいて作成されたそれぞれの視点変換画像を所定の時間間隔で順次切り替え表示する表示部3とを有する。
(もっと読む)
駐車支援装置
【課題】周囲環境の影響で駐車目標であるマークの認識処理に適した明るさが得られない場合にも、マークを精度良く認識することができる駐車支援装置を提供する。
【解決手段】駐車スペースSの床面に設置された駐車目標であるマークMを車両100に搭載されたビデオカメラ10により撮影し、撮影された画像からマークMの認識処理を行う。運転者によりマークMが存在すると思われる画像上の位置が駐車目標位置指定部50により指定されると、駐車目標認識部20は、指定された位置を中心として一定範囲を測光領域Rとして設定し、この測光領域Rの輝度値に基づいてマークMの認識処理に適するようにビデオカメラ10の露光条件を制御することにより、画像の輝度値を調整する。
(もっと読む)
画像処理システム
【課題】車載ネットワーク上に車載カメラおよび複数の画像認識部が接続された画像処理システムにおいて、画像認識部が画像認識処理をするための前処理を省くことが可能となる技術を提供する。
【解決手段】画像処理システムにおいて、車載ネットワーク上の車載カメラは画素値がRGB表色系で表される画像を撮影する。主成分算出部は撮影したフレーム画像に対して主成分分析を行い、変換行列を求める。画素値変換部は変換行列と各画素のRGB画素値から第1〜第3主成分得点を取得し、少なくとも第1主成分得点を車載ネットワークに配信する。画像認識部はコントラストが強調された第1主成分得点に基づいて画像認識を行い、必要な後続処理を実行する。
(もっと読む)
車線認識装置及び方法
【課題】 運転操作を支援するために、高精度で車線を検知できる車線認識装置を提供する。
【解決手段】 走行路を撮像する撮像部11により撮像された撮像画像に基づいて、走行路に設けられた車線識別用マーカの視認性を把握する視認性把握部14と、視認性把握部14により把握された視認性が高い場合には、撮像画像に対する画像処理領域を車両から遠方側に設定する道路形状算出部13とを備え、後段にて、画像領域設定部12により設定された画像処理領域に含まれる画像(道路形状)を用いて車線を認識する。
(もっと読む)
駐車支援装置
【課題】ドライバが駐車したい場合に適切に駐車支援を行うことが可能で、駐車支援を開始する位置から駐車目標位置までの距離を短くすることが可能な駐車支援装置を提供する。
【解決手段】駐車支援装置100は、車両50を駐車する駐車目標位置を設定する駐車目標位置設定部17と、車両50が有するシフトレバーのシフト位置と車両50が有するステアリングの操舵変位量とに基づいてドライバにより駐車操作が開始されたか否かを判定するトリガ成立判定部16と、当該トリガ成立判定部16により駐車操作が開始されたと判定された場合に車両50の自車位置から駐車目標位置までの経路の演算を開始する駐車経路演算部19と、自車位置から駐車目標位置までの経路が生成できた場合に駐車目標位置へ誘導可能であることを報知する報知部21と、を備える。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】駐車支援を開始する初期位置や車両姿勢に依存せずに、ドライバの意図する位置に正しい姿勢で車両を適切に駐車させることができ駐車支援装置及び駐車支援方法を提供する。
【解決手段】初期位置の基準点O及び初期姿勢Voと目標位置の基準点P及び駐車姿勢Vpを求め、切返し姿勢Vrが決定したら、初期姿勢Voに対する切返し姿勢Vrの姿勢角θnと、駐車姿勢Vpに対する切返し姿勢Vrの姿勢角θmとから、初期位置の基準点Oを通って初期姿勢Voに対してθn/2の傾きを持つ直線OQと、目標位置の基準点Pを通って駐車姿勢Vpに対してθm/2の傾きを持つ直線PSとの交点を求めて、この交点を基準点Rとした位置を切返し位置として算出する。そして、初期位置の基準点O及び切返し位置の基準点Rを通る円弧C1’と、目標位置の基準点P及び切返し位置の基準点Rを通る円弧C2’とを繋いだ経路を誘導経路として算出する。
(もっと読む)
車線認識装置
【課題】車両とレーンマークとの相対位置の認識が停止する期間を、レーンマーク検出の信頼性の高さを確保した上で短縮した車線認識装置を提供する。
【解決手段】所定の制御周期毎にカメラ2により車両前方の道路の画像を取り込んでレーンマークの検出処理を実行し、レーンマーク検出の有無を示す検出有無データをリングバッファ14に追加するレーンマーク検出手段11と、走行状況検知手段15により車両が交差点を走行している状態であることが検知されているときは、リングバッファ14への新たな検出有無データの追加を禁止する検出有無データ追加書込み禁止手段16と、リングバッファ14のデータから算出されるレーンマーク検出率が信頼性閾値よりも高い状態で、レーンマークが検出されたときに、車両とレーンマークとの相対位置を認識するレーンマーク位置認識手段13とを備える。
(もっと読む)
駐車支援装置、駐車支援システム、駐車支援方法、及び駐車支援プログラム
【課題】前進駐車時においてもドライバの支援を行うことができる、駐車支援装置を提供すること。
【解決手段】第2駐車支援装置210は、自車200周辺を視認可能とする視認部を有する周辺視認装置212と、周辺視認装置212の角度を調整する調整部213と、自車200が駐車している場合において、自車200に隣接する駐車領域に他車100が駐車するか否かを判定する車両駐車判定部214aと、自車200と他車100との位置関係を特定する位置関係特定部214bと、車両駐車判定部214aによって自車200に隣接する駐車領域に他車100が駐車すると判定された場合、位置関係特定部214bによって特定された位置関係に基づき、他車100のドライバが確認すべき領域を当該他車100のドライバが周辺視認装置212を介して視認可能な位置に周辺視認装置212の角度を調整するための指示を調整部213に行う指示部214cとを備える。
(もっと読む)
201 - 220 / 1,853
[ Back to top ]