
Fターム[5H180LL17]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | 車庫、駐車場、ガソリンスタンド等の近傍 (344)
Fターム[5H180LL17]に分類される特許
61 - 80 / 344
車両用情報提示装置
【課題】車両が目的位置に到達するにあたり、到達までの時間を短縮することが可能な車両用情報提示装置を提供する。
【解決手段】車両用情報提示装置1は、車内の表示部60により画像を提示するものであって、自車両の位置を検出すると共に、目的位置を設定し、且つ、検出した自車両の位置から、設定した目的位置に到達するための最適経路を算出するナビゲーション装置20と、ナビゲーション装置20により算出された最適経路に対する自車両のズレ方向を算出すると共に、表示部60に表示させる画像を、算出したズレ方向とは逆方向に回転させる表示制御部50とを備えている。
(もっと読む)
運転支援装置

【課題】運転者の操作の煩雑化を防止して快適な運転フィーリングを実現することができる運転支援装置を提供すること。
【解決手段】本発明による運転支援装置1は、車両の車速を検出する車速検出手段2aと、車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車両制御手段2cと、自宅周辺情報を取得する取得手段2dと、車両が自宅周辺情報の範囲に進入した場合に、自宅周辺情報が含む駐車場に車両を駐車させるにあたって適切な停止位置に停車していると仮想される仮想先行車両と車両との仮想車間距離を検出する仮想車間距離検出手段2eと、設定車間時間を車速と仮想車間距離に基づいて決定される目標車間時間に置換する置換手段2fを含むことを特徴とする。
(もっと読む)
車両の出庫モード選択表示装置
【課題】駐車モードに応じて適切な出庫モードを選択する表示装置を提供する。
【解決手段】出庫モード選択表示装置は、駐車スペースへの車両の駐車形態を示す駐車モードのそれぞれに対応して、駐車スペースからの車両の出庫形態を示す出庫モードを予め記憶する出庫モード記憶手段と、車両が駐車スペースに駐車するとき、該駐車の駐車モードを判定する駐車モード判定手段と、車両が前記駐車スペースに駐車した後、該車両の乗員からの該駐車スペースからの出庫開始指示を検出する手段と出庫開始指示に応じて、出庫モード記憶手段から、該判定された駐車モードに対応する出庫モードを選択して表示する選択表示手段と、を備える。自動操舵によって駐車された場合のみならず、手動操舵によって駐車された場合にも駐車モードを判定することができる。
(もっと読む)
駐車支援装置
【課題】周囲環境の影響で駐車目標であるマークの認識処理に適した明るさが得られない場合にも、マークを精度良く認識することができる駐車支援装置を提供する。
【解決手段】駐車スペースSの床面に設置された駐車目標であるマークMを車両100に搭載されたビデオカメラ10により撮影し、撮影された画像からマークMの認識処理を行う。運転者によりマークMが存在すると思われる画像上の位置が駐車目標位置指定部50により指定されると、駐車目標認識部20は、指定された位置を中心として一定範囲を測光領域Rとして設定し、この測光領域Rの輝度値に基づいてマークMの認識処理に適するようにビデオカメラ10の露光条件を制御することにより、画像の輝度値を調整する。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】固定目標を撮影して利用する駐車支援装置において、単純な画像認識処理を用いながら高い認識精度で固定目標を認識することができるものを提供する。
【解決手段】マークMは複数の発光体1を含む。複数の発光体1の集合によって特徴点C1〜C4が形成される。車両側装置20の点灯要求生成手段36は、各特徴点の点灯要求を順次生成し、これを駐車場側装置10に送信する。駐車場側装置10の表示制御装置11は、点灯要求に基づいて特徴点を点灯させる。車両側装置20の画像認識装置31は、特徴点を順次画像認識する。この結果を用いて、車両側装置20の位置パラメータ算出手段34がマークMに対するカメラの位置パラメータを算出する。
(もっと読む)
駐車ナビゲーションシステム
【課題】駐車ナビゲーションシステムにおいて、車両から遠く離れた領域まで歪みの影響が低減された画像とともに、車両に対する操作内容を提示する。
【解決手段】表示制御部62が、映像表示手段63の表示領域を分割して、その分割して得られた2つの表示領域D1,D2に表示する映像は、カメラ映像処理部15により得られた俯瞰画像Q1と、ナビ映像再生制御部50により再生された駐車操作ナビゲーション映像Niとであり、この駐車操作ナビゲーション映像Niは、カメラ10で得られた実映像を信号処理したものではなく、アニメーション映像等の模式化された映像であるため、車両200から遠く離れた領域まで歪みの無い映像として表示する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】駐車支援を開始する初期位置や車両姿勢に依存せずに、ドライバの意図する位置に正しい姿勢で車両を適切に駐車させることができ駐車支援装置及び駐車支援方法を提供する。
【解決手段】初期位置の基準点O及び初期姿勢Voと目標位置の基準点P及び駐車姿勢Vpを求め、切返し姿勢Vrが決定したら、初期姿勢Voに対する切返し姿勢Vrの姿勢角θnと、駐車姿勢Vpに対する切返し姿勢Vrの姿勢角θmとから、初期位置の基準点Oを通って初期姿勢Voに対してθn/2の傾きを持つ直線OQと、目標位置の基準点Pを通って駐車姿勢Vpに対してθm/2の傾きを持つ直線PSとの交点を求めて、この交点を基準点Rとした位置を切返し位置として算出する。そして、初期位置の基準点O及び切返し位置の基準点Rを通る円弧C1’と、目標位置の基準点P及び切返し位置の基準点Rを通る円弧C2’とを繋いだ経路を誘導経路として算出する。
(もっと読む)
駐車支援装置
【課題】ドライバが駐車したい場合に適切に駐車支援を行うことが可能で、駐車支援を開始する位置から駐車目標位置までの距離を短くすることが可能な駐車支援装置を提供する。
【解決手段】駐車支援装置100は、車両50を駐車する駐車目標位置を設定する駐車目標位置設定部17と、車両50が有するシフトレバーのシフト位置と車両50が有するステアリングの操舵変位量とに基づいてドライバにより駐車操作が開始されたか否かを判定するトリガ成立判定部16と、当該トリガ成立判定部16により駐車操作が開始されたと判定された場合に車両50の自車位置から駐車目標位置までの経路の演算を開始する駐車経路演算部19と、自車位置から駐車目標位置までの経路が生成できた場合に駐車目標位置へ誘導可能であることを報知する報知部21と、を備える。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】トルクセンサを用いることなく、ドライバーによるステアリングの操作介入を判断する。
【解決手段】駐車位置に対する目標駐車経路に応じて設定される目標操舵角に基づいて電動モータ13を制御することにより、駐車時のステアリング操作が自動的に行われる。この場合、ステアリングの角加速度ω’に基づいて、ドライバーによるステアリングの操作介入が判断される。
(もっと読む)
駐車支援装置
【課題】駐車区画内に障害物があっても駐車可能な駐車支援装置を提供する。
【解決手段】障害物20の存在により、車両7が駐車可能なスペースの幅が狭くなっており、サイドモニターカメラ11は、障害物20の位置や大きさ等の障害物情報を検知する。サイドモニターカメラ11によって検知された障害物情報は、障害物情報取得手段14に伝達される。障害物情報取得手段14が取得した障害物情報と、駐車区画情報記憶手段15に記憶された駐車区画情報とに基づいて、移動軌跡変更手段5は、一方の側壁SWと障害物20との間のスペースに車両7が侵入可能となるように、駐車軌跡記憶手段4に記憶された基準駐車シーケンスLの第2移動軌跡L2を変更して変更第2移動軌跡L2’にする。
(もっと読む)
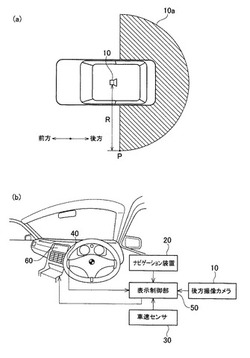
駐車支援装置
【課題】輪止め12に当らないことを運転者に警告することで、問題の発生を回避する。
【解決手段】車両C後方の、駐車支援用に設定された駐車支援範囲内の情報を取得する取得ステップS23と、その取得ステップS23で取得した情報から、車両Cを駐車する駐車枠11と、その駐車枠11内の輪止め12とを認識する駐車域認識ステップS31と、運転者に対して警告を発するスピーカ4とを備えている。
車両Cを後退させて駐車枠11内に駐車しようとする際、駐車域認識ステップS31にて駐車枠11内に輪止め12が認識できない場合、スピーカ4を介して運転者に、駐車枠11内には輪止め12が無いので注意する旨の警告を発する。これにより、輪止め12に当らないことを事前に警告することで運転者に注意を促すことで、他車や障害物に衝突したり、縁石に乗り上げたり、溝に脱輪してしまったりといった問題の発生を回避することができる。
(もっと読む)
駐車支援装置
【課題】駐車目標位置に車両を導入する際に障害物等を避けた切り返しが可能となる駐車支援装置を構成する。
【解決手段】停車位置から駐車目標エリアGに車両30を直接的に誘導する直接誘導制御を行えない場合に切り返し誘導制御を設定する。切り返し誘導制御では、停車位置から駐車目標エリアGの近傍まで補助誘導経路K1に沿って車両30を誘導する。次に、人為操舵による前進を許し、この前進時に駐車目標エリアGに直接的な誘導が可能である場合には報知を行い、この報知で停車した後には、最終誘導経路K3に沿って車両30を誘導する。
(もっと読む)
運転支援装置、駐車向き提示方法、駐車向き提示プログラム
【課題】 駐車場の環境に応じて駐車の向きを判定する「運転支援装置、駐車向き提示方法および駐車向き提示プログラム」を提供する
【解決手段】 本発明に係る運転支援装置は、自車周辺を撮像する撮像手段と、自車が駐車準備段階に突入したか否かを検出する駐車検出手段と、駐車準備段階が検出されたとき、撮像手段により撮像された撮像データを画像解析する画像解析手段と、画像解析結果に基づき自車が駐車場に駐車する向きを判定する駐車向き判定手段と、駐車向き判定手段の判定結果を提示する提示手段とを有する。駐車場の奥行き部に植物Pが存在する場合には、前向き駐車の案内242がなされる。
(もっと読む)
画像処理装置
【課題】切り替え前後の画像間で同一の物体を容易に対応付けられるようにする。
【解決手段】車両1を上方から俯瞰する視点及び撮影方向の仮想画像から、車両1の公報を写す仮想画像にモニタの表示内容を切り換える際に、車両1の上方から屋根部分1aにズームインする動画と、屋根部分1aから車両1の後方にズームアウトする動画とをモニタに表示させる。そして、両動画の間に、モニタの画面全体に車両1の屋根部分1aをアップで写す仮想画像を挿入してモニタに表示させる。挿入する屋根部分1aの仮想画像は、モニタの画面の中央を通る任意の対称軸を境として線対称な画像とする。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】駐車目標位置の近傍に存在する障害物の位置を確実に計測できるようにして、自動操舵制御により自車を駐車目標位置へと誘導する際の信頼性を向上させる。
【解決手段】駐車支援コントローラ10が、自車の駐車目標位置の設定時までの間に得られる情報に基づいて、駐車目標位置よりも自車進行方向の前方側に存在する障害物の位置を超音波ソナー2a,2bで計測するための予備経路を駐車目標位置の設定時に算出する。そして、駐車目標位置を設定した直後に自車の自動操舵制御を開始して、自車が予備経路に沿って障害物の近傍を通過するように、自車の操舵を制御する。
(もっと読む)
駐車支援システム、車載駐車支援装置、情報付マーカー
【課題】事前準備の手間を少なくすることができる駐車支援システムを提供する。
【解決手段】マーカー100に、そのマーカー100が設置されている駐車スペースの駐車スペース情報(a〜dの長さ)と、駐車動作可能スペース情報(e〜gの長さ)を情報コード120として含ませる。また、車載駐車支援装置1は、マーカー100に対する自車の相対位置を決定する相対位置決定手段を備えるとともに、自車の大きさと最小回転半径を記憶する。自動駐車制御装置80は、これら駐車スペース情報、駐車動作可能スペース情報、マーカー100に対する自車の相対位置、自車の大きさ、最小回転半径から駐車動作予定経路を算出する。このようにして駐車動作予定経路を算出するので、事前に理想駐車軌跡を教授する手間が必要なくなる。
(もっと読む)
車両用表示装置
【課題】車両の乗員が、障害物の種類、及び障害物と車両との間の距離を把握することを容易にする車両用表示装置を提供
【解決手段】まず、車両の後方、左側方、及び右側方を後方カメラ12、左側方カメラ13、及び右側方カメラ14で繰り返し撮影し、撮影した画像(以下、周囲撮影画像という)を取得する。そして、運転席に着座している乗員(運転者)の視点から、左サイドミラー、右サイドミラー、及びバックミラーを見たときに運転者により視認される左サイドミラー、右サイドミラー、及びバックミラーの映像を示す左サイドミラー変換画像、右サイドミラー変換画像、及びバックミラー変換画像を、取得した周囲撮影画像を座標変換することにより生成する。その後に、左サイドミラー変換画像、右サイドミラー変換画像、及びバックミラー変換画像を表示装置5に表示させる。
(もっと読む)
車両と対象との間の衝突を回避するための方法および装置
【課題】衝突回避のための対象検出を改善する方法および装置を提供すること
【解決手段】超音波測定システムによって、車両に対する対象の、少なくとも1つの第1の対象情報を検出し、光学測定システムによって対象の、少なくとも1つの第2の対象情報を検出し、当該第1の対象情報と第2の対象情報を相関させることを含んでいる車両と対象との間の衝突を回避するための方法。
(もっと読む)
運転支援装置
【課題】簡単な構成の映像によって、運転支援を可能にする。
【解決手段】駐車アシストの映像の切換えを運転者からのスイッチ操作に基づいて行う場合に、駐車アシスト動作の最初に切換える状態を、前回駐車アシスト動作を行わせたときの最終的な切換え状態を保存メモリに記憶しておいて、その記憶内容に従って設定する。これによって、1度運転者にとって見易い切換え状態が設定されれば、次回からの駐車アシストは、その見易い切換え状態で初めから行うことができる。
(もっと読む)
車両の後退支援装置および後退支援方法
【課題】
初心者でも難しい操作は必要なく安心して駐車の操作が行え、駐車操作時の補助が適切になされる車両の後退支援装置を提供する。
【解決手段】
車両の後退時に車両後方の映像を撮像するカメラ17と、車両の後退状態を検出するシフトレバーリバーススイッチ3と、後退状態と車両特性に基づいて、車両の予想軌跡20’を算出するCPU11と、車両後方の映像に、予想軌跡20’を座標変換した上で重畳して表示するディスプレィ13とを備え、後退状態が直進時であるときにおける予想軌跡20’を目標軌跡20aとしてディスプレィ13に固定して表示すると共に、目標軌跡20aをディスプレィ13に表示した後も目標軌跡20aとは異なる予想軌跡20’をディスプレィ13に表示しつづける駐車補助装置1とした。
(もっと読む)
61 - 80 / 344
[ Back to top ]