
Fターム[5H180LL17]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | 車庫、駐車場、ガソリンスタンド等の近傍 (344)
Fターム[5H180LL17]に分類される特許
21 - 40 / 344
カメラ撮影画像表示装置
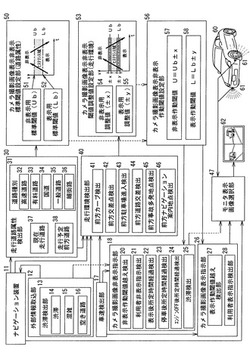
【課題】車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行う「カメラ撮影画像表示装置」とする。
【解決手段】走行する道路の属性に対応してカメラ画像の表示標準閾値と非表示標準閾値を設定し、車両が走行する道路形状等の走行環境に対応して、表示標準閾値と非表示標準閾値とを調整するための調整値を設定して、これらの値により表示作動閾値と非表示作動閾値とを設定する。車速が非表示作動閾値よりも低い状態から高くなったときカメラの画像の表示を非表示とし、作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示することにより、各閾値間にヒステリシス域を設けて頻繁な表示切り換えを防ぐ。
(もっと読む)
車両周囲表示装置、車両周囲表示方法

【課題】 従来、車載装置において、車両の周囲を画像として表示するとともに、コーナーセンサー等により障害物の存在を検知して、車両の周囲の画像上に当該コーナーセンサーが障害物を検知した旨の表示を行う技術がある。しかし、そのような技術では、障害物が付近に存在することを示すことはできるが、運転者は障害物の具体的な形状をイメージし難い。
本発明の目的は、運転者に車両の周囲の立体物の配置状況をよりわかりやすく示す技術を提供することにある。
【解決手段】
本発明の車両周囲表示装置は、車両の周囲を撮像するとともに車両の周囲に存在する立体物の高さを検知して、立体物の高さが車両にとって危険な高さにある場合に、画像に含まれる危険な障害物を特徴付けて表示する。
(もっと読む)
車載照明装置、画像処理装置及び画像表示システム
【課題】撮影を補助する複数の光源を簡便かつ低コストに車両に取り付ける。
【解決手段】車両の同一方向の側方領域を照明する3つの光源60が、同一のハウジング7内に光軸の方向が互いに異なる状態で固定されて収容される。これにより、3つの光源60がハウジング7によってサイドカメラユニット70として一体化される。このため、このサイドカメラユニット70を取り付けるのみで、複数の光源60を車両に一度に取り付けることができる。その結果、車両9の側方領域を広範囲に照明するための複数の光源60を、簡便かつ低コストに車両に取り付けることができる。
(もっと読む)
駐車支援装置
【課題】運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供すること。
【解決手段】本発明による駐車支援装置1は、車両の周辺の駐車空間を検出する検出手段bと、駐車空間に基づいて初期停車位置を決定し初期停車位置への案内を行う案内手段jと、車両の位置を検出する位置検出手段aと、位置が所定の領域に存在する場合に検出手段bに駐車空間を検出することを開始させる開始処理を行う開始手段dを含むことを特徴とする。
(もっと読む)
駐車支援装置
【課題】駐車支援性能を向上する駐車支援装置を提供する。
【解決手段】CPU12pは、車両の周辺を捉えるカメラC_1〜C_4から出力された被写界像を繰り返し取り込み、取り込まれた被写界像に基づく車両周辺画像を運転席のモニタ画面に再現する。駐車指示を受け付けると、CPU12pは、被写界像に基づいてハンドル16swの回転量を調整し、このような調整処理と並列して車両の周辺から発見された障害物の移動経路を予測し、そして予測された移動経路をモニタ画面に再現する。
(もっと読む)
運転支援装置
【課題】運転者の違和感を抑制しつつ的確な安全確認支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置は、車両の周囲を撮像する撮像部と、前記撮像部により撮影された画像を、車室内に設定された仮想視点から見た車両の周囲の画像に変換すると共に、前記仮想視点を中心として視覚方向を連続的に変化させた連続画像を生成する画像生成部と、前記画像生成部により生成された前記連続画像を表示する表示部と、シフトポジションが、前進走行のレンジ又は後退走行のレンジに切り替えられた場合に、前記表示部に前記連続画像を表示させる制御部と、を備える。
(もっと読む)
距離推定装置
【課題】従来よりも簡単な構成で距離の推定を可能にする距離推定装置の提供である。
【解決手段】対象物までの距離を推定する距離推定装置の一観点によれば、鏡と、対象物の実像および対象物の実像が映る領域以外の領域に鏡に映る対象物の鏡像を受光するレンズ部とレンズ部が受光した光を画像情報に変換する撮像素子とを有するカメラと、撮像素子が撮像した画像内の対象物の実像と鏡像の位置に基づき対象物までの距離を推定する電子制御ユニットとを有する。
(もっと読む)
運転支援装置
【課題】運転者の違和感を抑制しつつ運転者の視野を広げて運転者の利便性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置は、車両の周囲を撮像する撮像部と、前記撮像部により撮影された画像を、運転席に着席した乗員の視点を仮想視点として見た車両の周囲の画像に変換すると共に、前記仮想視点を中心として視覚方向を連続的に変化させた連続画像を生成する画像生成部と、前記画像生成部により生成された前記連続画像を表示する表示部と、を備える。
(もっと読む)
駐車スペース案内システム
【課題】駐車場側に特別な設備を要することなく、車両側における簡単な構成で、立体的な駐車場を含めて精度良く駐車場の空きスペースを案内する技術を提供する。
【解決手段】自車両に近接する他車両の固有のID情報を含む車両情報を取得する車両情報取得部11と、自車両の周辺物体と自車両との距離情報を含む周辺物体の物体情報を取得する物体情報取得部12と、車車間通信を行って駐車場マップを取得する駐車場マップ取得部13と、車両情報と物体情報とを用いて駐車場マップに自車両をマッピングするマッピング部14と、駐車場マップを用いて空きスペースを案内する案内部15と、自車両と周辺物体との相対的な近距離マップを生成する近距離マップ生成部16と、近距離マップを用いて駐車場マップを更新する駐車場マップ更新部18と、更新された駐車場マップを車車間通信により送信する駐車場マップ送信部19とを備える。
(もっと読む)
車両用障害物検出装置
【課題】カメラで撮影した複数の画像を用いて、障害物とそれ以外の領域を識別可能な俯瞰視点の状況図を自己生成する車両用障害物検出装置を提供する。
【解決手段】車両の周囲を撮影可能な撮像部と、撮像部で撮影した車両周辺の画像に含まれる障害物を検出する障害物検出部と、撮影部で撮影した車両周辺の画像を所定の仮想視点から見た俯瞰画像に変換して出力する俯瞰画像生成部と、俯瞰画像に含まれる障害物画像と障害物以外の画像とを識別可能な画像に変換し、車両の周辺の状況を表す俯瞰視点の状況図を作成する状況図生成部と、状況図を表示する表示部と、を具備する。
(もっと読む)
運転支援装置
【課題】ユーザがステアリングを正位置に戻す操作をより容易にすることを可能にする運転支援装置をより容易に提供する。
【解決手段】ステアリング角度に応じた走行予想軌跡Bを車両後方画像Aに重畳して表示器で表示させるとともに、ステアリング角度に応じて曲率が変化する1本の舵角線Cを、当該走行予想軌跡の幅方向中心に表示させる。
(もっと読む)
運転支援装置
【課題】 車両後退時に最終的に達成したい操作目標に対する進捗状況を暗示的に音を用いて運転者に簡単かつ効果的に報知する運転支援装置を提供することである。
【解決手段】車両後退時にリバース音を出力して運転を支援する運転支援装置50。車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部51と、リバース音を主音とみなした音階に属するリバース音を音階リバース音として管理するリバース音管理部52と、運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部53と、リバース音管理部によって管理されているリバース音から出力リバース音決定部によって決定された音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部54とが備えられている。
(もっと読む)
運転支援装置
【課題】輪留めとタイヤとの位置関係などを運転者に表示する運転支援装置を低コストにて提供可能とする。
【解決手段】CCDカメラによって撮影された画像と、車両のタイヤ位置や車体位置などの基準位置を示す画像とを組み合わせた合成画像を生成し、その合成画像上に、目印マーカーを表示する。目印マーカーは、車両が移動したとき、車両の移動方向とは逆方向に、車両の移動距離分だけ合成画像上を移動するように表示される。このため、車両の周囲に輪留めや障害物があった場合に、それらが車体の陰に隠れるなどして、CCDカメラの撮影範囲外となっても、輪留めや障害物に対応する位置に表示された目印マーカーを用いることにより、合成画像上において、その目印マーカーと車両との基準位置との接近度合を確認することができる。
(もっと読む)
駐車支援装置及び方法
【課題】複数の駐車枠位置や複数の駐車経路が存在するような場合でも、運転者の操作負担を最小化できる駐車支援装置を提供する。
【解決手段】駐車枠位置取得部21は、車載のカメラ3〜6の画像から一つもしくは複数の駐車枠位置を取得する。車両状態検出部22は、車輪速度センサ7〜10の検出信号から自車両の位置及び姿勢を検出する。駐車経路生成部23は、車両状態検出部22が検出した自車両の位置及び姿勢と、駐車枠位置取得部21が取得した駐車枠位置に基づいて、それぞれの駐車枠位置への駐車経路を生成する。評価部24は、それぞれの駐車経路に対する運転者の操作負担を評価し、この評価結果に基づいて、駐車経路選択部25は、運転者の操作負担が最小な駐車経路を選択し、車載モニタ13へ表示する。
(もっと読む)
駐車空間認識装置
【課題】水平広角度ソナーを用いても駐車空間の認識精度を高めることができる駐車空間認識装置を提供する。
【解決手段】駐車空間認識装置は、駐車領域検出ラインLに駐車車両検出部Laが複数ある場合には、座標平面上に、各駐車車両の仮想中心点Eを設定し、さらに仮想駐車位置11aを設定する。次に、駐車空間認識装置は、仮想駐車位置11a、11a間のX軸に平行な最短距離を算出して、この最短距離が一般的な駐車幅以上である場合には、仮想駐車位置11a、11a間に駐車空間Sがあると判断して、この駐車空間Sの存在をモニタに表示する。
(もっと読む)
車両周辺認知支援装置
【課題】運転者が煩わしさを感じることなく自然に意識を向けるきっかけを与えることのできる車両周辺認知支援装置を提供する。
【解決手段】車両の周辺を撮影する車載カメラにより時系列に撮影された複数のフレームからなる撮影画像を受け取る画像受取部11と、異なる時刻に撮影された複数のフレームに含まれる特徴点に基づいてオプティカルフローを演算するオプティカルフロー演算部12と、オプティカルフローに基づいて車両の周辺の移動体を検出する移動体検出部13と、オプティカルフローに基づいて移動体の移動軌跡を示す表示を撮影画像に重畳させる重畳部15とを備える。
(もっと読む)
運転支援システム、運転支援装置、運転支援方法、及び運転支援プログラム
【課題】ドライバの思い込みによるリスクを低減できる運転支援システムを提供する。
【解決手段】車両の運転を支援する運転支援システムにおいて、自車に搭載されている自車周辺の映像を撮像する映像撮像装置と、前記自車周辺にある障害物までの距離を測定する障害物距離計測装置と、前記撮像した自車周辺の映像と記憶している自車を模擬した画像とを合成するモニタ映像生成部と、前記計測された距離に基づいて、ドライバの危険運転度を判定する危険運転度判定部と、前記危険運転度判定部の判定結果に基づいて、自車を模擬した画像の大きさを変更する画像変更部とを備えた運転支援装置と、前記画像変更部で変更された画像を表示可能な画像表示装置とを備える。
(もっと読む)
外界認識装置
【課題】処理負荷の低減と検出精度の向上を図ることができる外界認識装置を提供する。
【解決手段】車両10に設置された複数のカメラ201〜203で撮像される車両周囲の画像を利用して認識対象Pを認識する外界認識装置は、入力されるパラメータに応じて、前記各画像の座標変換と合成を行い、合成画像を作成する合成変換部104と、合成変換部104で作成された合成画像に対して画像処理を行い、認識対象を認識する認識部と105と、認識部105によって認識された認識結果に基づいてパラメータを生成するパラメータ生成部108を有する。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から仮想的に移動させ、各経路パターンの先端に設定された仮想移動点に置く仮想移動処理手段と、前記各仮想移動点を、新たな基準点とする基準点更新処理手段と、各仮想移動点において、車両を目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、移動可能条件が成立する場合、経路を生成することができると判断する経路生成判断処理手段と、移動可能条件が成立しない場合、経路パターンを変更する経路パターン変更処理手段とを有する。前記移動可能条件が成立しない場合に前記経路パターンが変更されるので、経路を確実に生成することができる。
(もっと読む)
駐車支援装置
【課題】 自車が路側施設へ進入したとき自動的に駐車支援機能を起動できる駐車支援装置を提供する。
【解決手段】 自車が駐車する際に運転者に対して運転を支援するための情報提供を行う駐車支援機能103と、自車周辺の路面を撮像する車両周辺撮像装置200と、車両周辺撮像装置200の撮像画像から得られた情報に基づいて、自車が路側施設に進入したことを判定する走行状態認識機能102と、走行状態認識機能102で自車が路側施設に進入したと判定された場合、駐車支援機能103を起動する駐車支援切換機能101と、を備える。
(もっと読む)
21 - 40 / 344
[ Back to top ]