
Fターム[5H180LL17]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | 車庫、駐車場、ガソリンスタンド等の近傍 (344)
Fターム[5H180LL17]に分類される特許
41 - 60 / 344
車両逆走防止システム
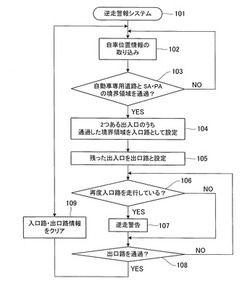
【課題】本発明は、サービスまたはパーキングエリアからの退出時に、入口路を走行していることを、自動車専用道路に進入する前に運転者に警告し、自動車専用道路を逆走することを防止する車両逆走防止システムを実現することを目的としている。
【解決手段】このため、地図データ記憶手段と、自車位置情報取得手段と、地図データ記憶手段の地図データと自車位置情報取得手段の自車位置から、自車が自動車専用道路からサービスまたはパーキングエリアへの進入を検出する進入検出手段と、進入検出手段の進入検出時に、自動車専用道路とサービスまたはパーキングエリアとの境界領域を入口路として記憶する入口路記憶手段と、地図データと自車位置から自車の入口路の走行を検出する入口路走行検出手段と、入口路の走行時に警告する警告手段を備える。
(もっと読む)
駐車支援装置

【課題】駐車させる場合に、車両と駐車スペースの枠との平行の程度を確認しやすくする駐車支援装置を提供する。
【解決手段】駐車支援装置は、車両の周辺の画像を撮像し、撮像された画像から、車両の進入方向に伸長する駐車スペースの枠線を認識し、該認識された枠線の、該駐車スペースの入口とは反対の方向に向かう延長線上に、仮想の枠線を前記画像上に重畳し、該仮想の枠線が重畳された画像を表示する。仮想の枠線により、駐車スペースの枠線が、駐車スペースの入口とは反対方向に向かって延長されたように表示されるので、車両が該駐車スペースに進入するにつれて表示される枠線が短くなるのを回避することができる。したがって、駐車スペースに進入した後も、運転者は、車両が駐車スペースの枠線に平行であるかどうかを、容易に確認することができる。
(もっと読む)
駐車支援装置
【課題】駐車スペースに車両を1回の後退操作で駐車可能な切り返し位置であることを認識できる駐車支援装置を提供する。
【解決手段】車両の後方の画像を撮像し、車両が前進している間、車両を直進後退させた場合に該車両の駐車スペース側の部分が辿る第1の軌跡と、該直進後退するときとは異なる所定のハンドルの舵角で旋回後退させた場合に該車両の駐車スペース側の部分が辿る第2の軌跡とを、該車両の該駐車スペース側の後輪の後端部から伸長するように、後方の画像に重畳して表示する。この表示により、車両の乗員は、駐車スペースの入口の両端部のうち前記切り返し位置に近い方の端部が第1および第2の軌跡の間に入ったときの該車両の位置が、該駐車スペースに該車両を1回の後退操作で駐車可能な前記切り返し位置であることを認識することができる。
(もっと読む)
縦列駐車案内装置
【課題】縦列駐車を行うに際して、最終的に後方車両が自車両の存在に関わらず円滑に発車することができ、また自車両が円滑に発車できる間隔を適切に且つ容易に確保できる「縦列駐車案内装置」とする。
【解決手段】縦列駐車時に後方を撮影するリアカメラの画像をモニタ表示する際、自車両と後方車両の間隔が、後方車両が円滑に駐車位置から脱出できる間隔を示す縦列駐車後方案内マークを表示し、運転者はそのマークに後方車両の画像の下端部分がほぼ一致するように駐車する。それにより自車両の縦列駐車後に前方に他車がほとんど間隔を置かずに駐車した時でも、後方の間隔分だけ後退すると円滑に発車できる。後方車両との間隔は、リアカメラ撮影画像で後方車両の車種を認識し、車種に応じた最小回転半径等の車両データで、後方車両が円滑に発車できる間隔を求め、その間隔位置にマークを表示しても良い。
(もっと読む)
画像処理装置、電子装置、および、画像処理方法
【課題】車両に搭載された表示装置に画像を表示する技術を提供する。
【解決手段】
所定の指示信号に応答して、車両の周辺を撮影する複数のカメラから取得される複数の画像に基づいた車両周囲の上方の仮想視点から車両方向をみる合成画像を生成する。この合成画像は、車両の周囲を周回するように仮想視点の位置が段階的に変更された複数の合成画像を表示装置に連続して出力される。これにより、ユーザが車両を目の前にした視点から車両の全周囲を確認することで、1つの画面で直感的に車両と障害物との位置関係を把握できる。
(もっと読む)
車載カメラ装置
【課題】簡単な構成で、車載カメラによる撮影画像のモニタにおける色の表示再現性を良好にする技術を提供する。
【解決手段】車両に搭載された車載カメラの撮影領域内に配置された基準色担体と、撮影画像から基準色担体の画像部分を参照画像として抽出する画像抽出部と、前記抽出された参照画像に基づいて撮影画像の色補正を行う色補正部とを備える車載カメラ装置。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】目標駐車位置への誘導を開始することが可能な範囲をさらに拡大して、より多くの駐車シーンに対応できるようにする。
【解決手段】自車を後退開始位置P3から目標駐車位置P2へと誘導するための誘導経路として、一般的な経路パターンである標準パターンの標準経路のほかに、回避ポイントAP1を回避しつつ目標駐車位置P2に正確に駐車させる障害物回避経路を計算する機能を駐車支援コントローラに持たせる。駐車支援コントローラは、回避ポイントAP1を避けて目標駐車位置P2に正確に駐車できる標準経路が算出できない場合は、誘導経路の経路パターンを標準パターンから障害物回避パターンに変更して障害物回避経路を算出し、この障害物回避経路に沿って自車を目標駐車位置P2へと誘導する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】目標駐車位置への誘導を開始することが可能な範囲をさらに拡大して、より多くの駐車シーンに対応できるようにする。
【解決手段】駐車支援コントローラ10に自動操舵経路と手動末切り経路との双方の経路演算を行う機能を持たせ、様々な駐車シーンに対応させて、自動操舵経路と手動末切り経路のうちでいずれか有利な誘導経路を選択し、選択した誘導経路に沿って自車を目標駐車位置へと誘導する。
(もっと読む)
車両周辺監視方法及び車両周辺監視装置
【課題】車両に乗り込もうとしている運転者に対して、確実に車両周辺の障害物の存在を認知させる。
【解決手段】車両に接近する運転者を認識する車外運転者認識部と、車両周辺の障害物の存在に関する障害物情報を生成する障害物情報生成部と、前記障害物情報生成部による障害物情報を前記認識された車外の運転者に報知する報知部とを備える車両周辺監視装置。
(もっと読む)
運転情報記録装置
【課題】ドライバの嗜好を反映した適切な駐車目標位置の自動設定を可能とする運転情報記録装置を提供する。
【解決手段】 運転情報記録装置1はECU2を備え、ECU2は、駐車判別部6及び駐車記憶部7を有している。駐車判別部6は、センサ部3からの出力信号に基づいて、自車両が駐車したか否かを判別し、更に自車両が駐車したと判別されたときに、入力部4及び自動駐車支援装置5からの出力信号に基づいて、自車両が手動運転及び自動運転のうち何れの方法で駐車したかを判別する。駐車記憶部7は、駐車判別部6により得られた情報を記憶(記録)する。具体的には、駐車記憶部7は、自車両が駐車したと判別されたときに、自車両が手動運転及び自動運転のうち何れの方法で駐車したかという情報、自車両の実際の駐車位置及び駐車方向等を含む自車両情報等を記憶する。
(もっと読む)
移動体追跡装置、移動体追跡方法及びプログラム
【課題】画面上を移動する移動体を連続的に精度よく追跡する。
【解決手段】移動体によって形成された撮像装置20の死角に移動体が進入した場合に、画像上に消失した移動体に対応する不可視領域を含んで構成される移動体領域を設定する。そして、この移動体領域に基づいて移動体の検出を行う。したがって、移動体が撮像装置20の死角から出現することで、移動体の画像が画像上に現れた場合には、新たに画面上に現れた移動体と認識することなく、継続して移動体の位置検出を行うことができる。つまり、移動体が死角に進入して画像上から消失したとしても、再度画像上に現れた移動体を、同一性を喪失することなく継続的に検出し、追跡することができる。
(もっと読む)
車両駐車支援装置
【課題】駐車車両の幅方向の端部位置を精度よく決定するための装置および方法を提供する。
【解決手段】自車両と駐車車両との間の距離を繰り返し測定する車両間距離測定センサと、駐車車両を繰り返し撮影するカメラと、自車両の進行距離を測定する進行距離測定センサと、自車両と駐車車両との間の距離を、自車両の進行距離に関連付けて記憶する、車両間距離記憶装置と、カメラで撮影された画像を、自車両の進行距離に関連付けて記憶する、画像記憶装置と、自車両の進行距離、および距離データから、駐車車両の幅方向端部位置を暫定的に決定する、暫定端部位置決定手段と、画像記憶装置に記憶された画像の中から、暫定端部の位置が画像の中央付近に位置するように撮影された画像を選択する、画像選択手段と、画像選択手段により選択された画像に基づいて駐車車両の最終的な幅方向端部位置を決定する、最終端部位置決定手段と、を有する。
(もっと読む)
車両駐車支援装置
【課題】
湾曲形状の前面または背面を備える駐車車両の幅方向の端部位置を精度よく決定するための装置および方法を提案する。
【解決手段】
本発明による駐車支援装置は、自車両の進行中に自車両と駐車車両との間の距離を繰り返し測定する車両間距離測定センサと、自車両の進行距離を測定する進行距離測定センサと、車両間距離測定センサで測定された自車両と駐車車両との間の距離を、進行距離測定センサで測定された自車両の進行距離に関連付けて記憶する、車両間距離記憶装置と、進行距離測定センサにより測定された進行距離を変数として並べられた、車両間距離測定センサにより測定された距離データの列を、二次以上の多項式で近似する、多項式近似手段と、多項式近似手段で近似された多項式の最高次の係数に基づいて、駐車車両の幅方向端部位置を決定する、端部位置決定手段と、を有する。
(もっと読む)
駐車支援装置、駐車支援方法及び駐車支援プログラム
【課題】 負荷の少ない方法で確実に停車すべき位置を認識できる駐車支援装置を提供する。
【解決手段】 駐車支援装置100は、車両後方を撮影して画像を取得するカメラ201と、車両後方に存在する障害物を検出し、車両後端から障害物までの距離を求める障害物検出部202と、車速を検出する車速センサ203と、障害物までの距離と車速とから、車両からその進行方向に伸びるガイド線を、障害物の手前位置を示す情報を付与したガイド線に修正するガイド線制御部205と、取得した画像と修正したガイド線とを合成し合成画像を作成する画像処理部207と、合成画像を表示するモニタ209を備える。
(もっと読む)
色弱者向け駐車支援装置、色弱者向け駐車支援方法、及びプログラム
【課題】色弱者であっても運転が可能な色弱者向け駐車支援装置、色弱者向け駐車支援方法、及びプログラムを提供する。
【解決手段】車載カメラによる画像を用いて運転者への駐車支援を行う駐車支援装置において、一般色覚者用の画像と色弱者用の画像とを切り替え自在に表示する画面表示手段と、色弱者が識別可能に設定された補正色を組み合わせて提示する色の組み合わせ手段と、を有する。
(もっと読む)
車両運転支援装置
【課題】駐車している車両を発進させようとしたときに車両後方画像のガイドラインを非表示にすることができる「車両運転支援装置」を提供すること。
【解決手段】車両運転支援装置は、表示手段と、車両の周囲の画像を取得する撮像手段と、撮像手段により撮像された車両の後方画像と走行ガイドラインの画像を基に出力画像を生成する画像処理手段と、ACCスイッチがオンになってから所定の時間以内に車両が後退する旨の信号を受信したとき、又はACCスイッチがオンになってからの走行距離が所定の距離以内のとき、走行ガイドラインを非表示にした車両の後方画像を出力画像として画像処理手段に生成させる制御手段とを有する。さらに、走行ガイドラインを表示又は非表示にすることを指示する切り替えボタンを備え、制御手段は切り替えボタンの押下による信号に応じて、走行ガイドラインを表示または非表示にする。
(もっと読む)
車両運転支援装置
【課題】誘導員による誘導が行われる場合における不要な警告の出力を低減することができる「車両運転支援装置」を提供すること。
【解決手段】警告出力制御手段15の制御により、警告出力手段16が、誘導員動作パターン情報記憶手段26に記憶された誘導員動作パターン情報に基づいて誘導員認識手段25によって認識された誘導員を対象とした警告の出力を中止すること。
(もっと読む)
駐車支援用電子制御装置、および車両用駐車支援装置
【課題】運転者に対する駐車の支援を良好に行う。
【解決手段】電子制御装置30は、運転者が車両の後退による駐車を開始しようとしているとして、ステップS110でYESと判定したときに、広角リアビューを映像として順次、表示パネル20に表示させる。その後、電子制御装置30は、車両を止めるべき位置に車両が近づいたとしてステップS150においてYESと判定したときには、アラウンドビューを示す映像を順次、表示パネル20に表示させる。このとき、電子制御装置30は、広角リアビューを示す映像に代えて、アラウンドビューを示す映像を表示パネル20に表示させる。したがって、広角リアビューおよびアラウンドビューを大きな表示サイズで表示パネル20に表示させることができる。
(もっと読む)
車載周辺画像表示装置
【課題】カメラで撮影した画像を俯瞰画像に変換するための射影変換規則を簡易に修正できる「車載周辺画像表示装置」を提供する。
【解決手段】自動車の四方を撮影する4台のカメラを撮影領域が一部重複するように配置し、各カメラで撮影した画像を、それぞれ射影変換して合成し、俯瞰画像を生成する。俯瞰画像で不具合が視認されたカメラを調整対象カメラとし、調整対象カメラの撮影領域と、他のカメラと撮影領域の重複範囲内の地面に正方形の校正パターンが描かれているターゲットボードを配置し、調整対象カメラで撮影した校正パターンを射影変換したパターンと、前記他のカメラで撮影した校正パターンを射影変換したパターンが一致するように、調整対象カメラで撮影した画像に対して用いる射影変換のパラメータを調整する。
(もっと読む)
移動体周辺撮影装置
【課題】周辺画像の不自然な変動を抑制する。
【解決手段】移動体周辺撮影装置1は、距離センサ15によって計測された障害物16との距離に応じてカメラ13の角度を設定し、障害物16を含む鳥瞰画像を表示装置11に表示させる。さらに、距離センサ15によって相対速度、相対加速度、および相対躍度を計測し、相対速度、相対加速度、および相対躍度に応じてカメラ13の角度を徐々に変化させる。これにより、車両10と障害物16との距離が急速に接近するような事態においても、画像上の所定位置に障害物16を継続的に位置させることができる。この結果、画像上における障害物16の不自然な位置変動を抑制でき、利用者に与える違和感を抑えることができる。
(もっと読む)
41 - 60 / 344
[ Back to top ]