
Fターム[5H180LL17]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | 車庫、駐車場、ガソリンスタンド等の近傍 (344)
Fターム[5H180LL17]に分類される特許
81 - 100 / 344
案内制御装置、案内制御システム、案内制御方法、及び案内制御プログラム
【課題】駐車場内で駐車を行う他車の駐車動作に基づいて、自車の採るべき動作を決定するために有益な情報を提供することができる、案内制御装置、案内制御システム、案内制御方法、及び案内制御プログラムを提供すること。
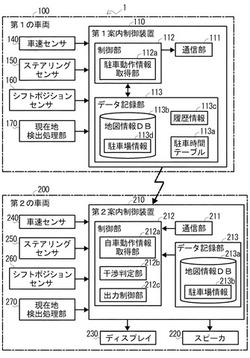
【解決手段】第2案内制御装置210は、他車の駐車を完了するまでの動作に関する他車動作情報を取得する通信部211と、自車の走行に関する自車動作情報を取得する自車動作情報取得部212aと、通信部211が取得した他車動作情報と、自車動作情報取得部212aが取得した自車動作情報とに基づいて、自車の予想軌跡と他車の駐車を完了するまでの予想軌跡との干渉の有無を判定する干渉判定部212bと、干渉判定部212bの判定結果に基づいて、他車動作情報に基づく案内情報を出力するスピーカ220やディスプレイ230とを備える。
(もっと読む)
運転支援装置

【課題】簡単な構成の映像によって、運転支援を可能にする。
【解決手段】 表示画面で、車両イラスト70にカメラ像の方向71や範囲72を併せて表示する。これによって、どのカメラユニット10による映像の表示かを判りやすく表示することができる。さらに、ステアリング7の切り角に応じて車両イラスト70の向きを変えるようにすれば、映像と進行方向との関係も判りやすく表示することができる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】交差点Xに進入する際の車速を適正な速度となるように運転者の運転を支援する。
【解決手段】交差点Xに進入する際の目標位置若しくは該目標位置より手前側に判定位置を設定する共に判定位置における判定車速を設定する。上記判定位置において、自車両の車速が判定車速より低い場合には、第1の設定車速を選択し、自車両の車速が判定車速以上の場合には、上記第1の設定車速よりも低い設定車速を選択する。自車両が交差点Xに進入する際の車速を、選択した設定車速以下となるように制限する。
(もっと読む)
駐車支援装置
【課題】周辺状況が変化しても出庫可能な駐車位置を設定する駐車支援装置を提供すること。
【解決手段】本発明に係る駐車支援装置10では、駐車候補領域検出手段31〜33によって駐車スペースを検出し、環境変化推定手段34〜35によって自車両の出庫時における駐車スペースの周囲スペースを推定する。この周囲スペースにおいて自車両が出庫可能か否かを判定手段36によって判定し、この判定結果に基づいて支援手段37によって駐車位置の設定を支援する。よって、出庫時に周辺環境がどのように変化するかを考慮して出庫可否の判定及び駐車位置の設定を行うため、周辺状況が変化しても出庫可能な駐車位置を設定することができる。
(もっと読む)
情報提供システム及び方法
【課題】通行又は停車する車両に対して有用な情報を提供する共に、情報提供を要因とするトラブルの発生を抑制できる情報提供システムを提供することにある。
【解決手段】エリア内で監視カメラ14により撮影された映像情報を使用して作成した情報を、エリア内の車両30の車載器20に提供する情報提供システムにおいて、車載器20に含まれる表示装置24の画面上には、例えば2秒間だけ情報の表示が行なわれるように、情報表示時間を制限する構成を有する情報提供システムである。
(もっと読む)
車両用周辺監視装置
【課題】車両周辺に存在する障害物を検知して表示させる場合に、自車両に対する障害物の移動方向の区別をユーザがより容易に行うことを可能にする。
【解決手段】障害物センサ1で一旦障害物を検知した場合に、当該障害物の検知データを経時的に取得する制御装置4と、制御装置4で経時的に取得した検知データを累積して格納する記憶装置とを備え、制御装置4が、記憶装置5に記憶されている新旧の複数の検知データをもとに、この新旧の複数の検知データに対応する新旧の複数の表示マークを撮像画像に重畳してディスプレイ3で表示させるとともに、表示マークの新旧の区別が可能となるように個々の表示マークの大きさおよび透過率を変化させてディスプレイ3で表示させる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】車両周囲を撮影した画像に対して、ドライバが車両の進行方向における車両の軌跡を容易に認識できるガイド線を重畳させて表示することが可能な運転支援装置及び運転支援方法を提供する。
【解決手段】運転支援装置は、車両(10)の周囲を撮影して、車両周囲の構造物を撮影した画像を取得する撮像部(2a〜2c)と、車両(10)の進行方向の軌跡を推定し、その軌跡に沿った所定幅を持つガイド線を実空間上での車両周囲の構造物の位置を表す実座標系上で設定し、かつ実座標系上のガイド線を、撮像部(2a〜2c)の車両(10)に対する取り付け位置及び撮影方向にしたがって、画像上での車両周囲の構造物の位置を表す画像座標系上に投影することにより、画像上にガイド線を描画するガイド描画部(433)と、画像上に描画されたガイド線を重畳した合成画像を作成する画像合成部(434)と、合成画像を表示する表示部(3)とを有する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】感覚的な違和感をドライバにもたらすことのない視界補助画像をドライバに提供することを課題とする。
【解決手段】画像処理装置は、自車両に搭載された搭載位置の異なる複数の車載カメラごとに、自車両の置かれる状況に対応付けて、ドライバの視線の起点となる位置と自車両の複数の所定箇所を結ぶ複数の方向、ドライバの視線の起点となる位置からの俯角およびドライバに視認させる範囲の値を、自車両に搭載された車載カメラの画像を座標変換するための画像変換パラメータとして予め記憶しておく。各車載カメラで撮影された画像を表示出力させる表示出力条件の入力をドライバから受け付けると、自車両が現在置かれている状況を判定する。さらに、表示出力条件および自車両が現在置かれている状況に基づいて画像変換パラメータを取得し、取得された画像変換パラメータを用いて、各車載カメラにより撮影された画像を変換して表示出力する。
(もっと読む)
車両用駐車支援装置
【課題】車両用駐車支援装置において、輪止めのない駐車場においても、ユーザーの最も必要とするタイミングで、俯瞰映像に切り替えることにある。
【解決手段】画像処理制御手段は、位置情報出力手段により出力された現在の車両の位置情報の地点における映像を撮影手段により撮影し、この撮影された映像内に映し出された固定物を識別できるように、固定物自身の位置情報と固定物の映像が表示手段の画面上での位置との両方を登録し、車両が駐車するための動作に入ったかどうかを判定し、車両が駐車するための動作に入ったと判定された場合には、撮影手段により撮影された映像を表示手段により表示し、位置情報出力手段から出力された現在の位置情報が登録された位置情報と表示手段の画面上での位置との両方が一致する情報であった場合には、表示手段により表示される映像を俯瞰映像に切り替える。
(もっと読む)
車両周辺認知支援装置
【課題】車載カメラによる撮影画像を用いて車両周囲において安全確認を要する対象に自然に意識を向けるきっかけとして、気配を感じさせ、車両周辺の状況を目視により確認するように促す車両周辺認知支援装置を提供する。
【解決手段】カメラ12により車両の周辺が撮影された複数フレームからなる動画の撮影画像を受け取る画像受取部1と、フレームの内の1つである対象フレームにおいて、方向指示器の表示色に相当する所定の色空間に属する画素を含む画像領域を対象画像領域として検出する対象画像領域検出部2と、対象画像領域の画像に所定の重み付けを与えて生成される残像画像を生成する残像生成部3と、対象フレームに続く少なくとも1つのフレームにおいて、対象フレームの対象画像領域の座標と同じ座標に残像画像を重畳して、表示部42に表示させる表示画像を生成する表示画像生成部4とを備える。
(もっと読む)
運転支援装置
【課題】簡単な構成の映像によって、運転支援を可能にする。
【解決手段】車両1が駐車場2に後進して駐車しようとする際に、白線3などで区画された駐車位置に正確に駐車できるように駐車アシストを行う。カメラ10から取得した複数の方向の映像とともに、映像が車両1に対してどの方向の範囲に対応するかを識別可能なイラスト及び文字で表示する表示制御手段を備え、車両1の運転者に見えにくかったり、死角となる映像をデイスプレイ4に表示し、進路予測曲線やガイドラインとともに、駐車場2での運転操作に対して分かりやすい支援を行う。
(もっと読む)
駐車支援装置
【課題】ユーザがジョイスティック等の遠隔操作手段を用いて、容易に目標駐車位置を設定することが可能な駐車支援装置を提供する。
【解決手段】目標駐車枠により目標駐車位置を設定し、該設定された目標駐車位置に車両を駐車させるための支援を行う駐車支援装置であって、車両周辺の撮像画像上に重畳表示されたポインタを遠隔から操作するための遠隔操作手段と、遠隔操作手段を用いてユーザから入力された座標位置に目標駐車枠を直接移動させる直接移動手段と、遠隔操作手段を用いて撮像画像上に重畳表示された方向ボタンをユーザが選択することにより、該選択された方向ボタンに関連付けられた方向に目標駐車枠を移動させる方向移動手段と、遠隔操作手段の操作によって、直接移動手段による直接移動モードと方向移動手段による方向移動モードとを切替える切替え手段と、目標駐車位置に車両を自動誘導させる制御手段とを備える。
(もっと読む)
駐車場管理システム
【課題】駐車場に入出場する車両同士が、複数並設された入出場レーンの合流地点で接触する危険を解消する。
【解決手段】子機である発券機2、3は、発券機1に対し切換要求信号を出力した後、発券機1から切換許可信号を受け取るまで駐車場発券処理を待機し、発券機1から切換許可信号を受け取った後、駐車場発券処理を開始する。一方、親機である発券機1は、発券機2、3から出力された処理中信号に基づいて発券機2、3が駐車場発券処理などを実行していることが認識された場合には、自身の駐車場発券処理を待機し、処理中信号に基づいて発券機2、3が駐車場発券処理などを実行していないことが認識された場合には、自身の駐車場発券処理を開始する。
(もっと読む)
駐車支援装置
【課題】ユーザが目標駐車位置を設定する際に、容易かつ迅速に目標駐車位置を設定することが可能な駐車支援装置を提供する。
【解決手段】目標駐車位置に車両を駐車させるために支援を行う駐車支援装置であって、車両周辺を映し出した撮像画像上に目標駐車枠を重畳表示させる表示制御手段と、入力手段を用いてユーザから入力された位置に目標駐車枠を移動させる目標駐車枠移動手段を含み、上記目標駐車枠により上記目標駐車位置を設定する目標駐車位置設定手段と、目標駐車位置設定手段により設定された目標駐車位置への駐車経路を計算する駐車経路計算手段とを備える。上記表示制御手段は、上記目標駐車枠移動手段によって目標駐車枠を移動させることが可能な領域と上記駐車経路計算手段により駐車経路を計算可能な領域との重複領域を撮像画像上に重畳表示させる。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】車両の切り返し位置にずれが生じた場合であっても、車両を駐車目標位置へと正確に移動させることができる駐車支援装置及び駐車支援方法を提供する。
【解決手段】切り返し動作を行うのに最適な位置として算出した推奨切り返し位置とは異なる位置で切り返し動作が行われた場合に、切り返し動作が行われた実切り返し位置から駐車目標位置に到達する第2駐車経路を算出し、この第2駐車経路を自車周囲の俯瞰画像上に描画した表示画像を表示する。
(もっと読む)
駐車支援装置
【課題】精度の高い駐車区画検知機能を有するとともに、ドライバにとって利便性の高い駐車支援装置を実現する。
【解決手段】第一の距離測定センサ1の出力情報と自車両位置演算手段2の演算結果とに基づいて隣接車両の存在領域を特定し、駐車可能区画の形状と自車両に対する相対的な位置ならびに傾きを演算する駐車区画検知手段3を備えると共に、シフトポジション検知手段71と、第二の距離測定センサ4の出力情報に基づく障害物接近判定手段5の判定結果を補正する障害物接近判定補正手段72を備え、障害物接近判定補正手段72では、車両のシフトポジションと、駐車区画検知手段3にて演算される駐車可能区画の形状と自車両に対する相対的な位置ならびに傾きに基づき、自車両がこのまま進行しても周辺の障害物と接触しないと判定した場合は、障害物接近判定手段5での判定結果を補正し、警報発生手段6による警報発生を抑制する。
(もっと読む)
走行記録装置
【課題】簡単な構成の映像によって、運転支援を可能にする。
【解決手段】 車両1の車体の前部に前方監視カメラ80を設置し、車体の最高部であるルーフにもルーフカメラ81を設置する。運転支援ECU84は、前方監視カメラ80が撮像する前方映像を利用して運転支援を行う。ナビゲーション装置85は、前方監視カメラ80によって撮像された前方の風景などの映像を取込むメモリを備え、交通渋滞の検出やなどに利用する。取込まれた映像は、ナビゲーション装置85によって、車両1が存在する位置の近傍に設置される交通管制センタなどに無線電波を介して伝達され、広域的な運転支援が行われる。前方監視カメラ80が撮像した映像は、情報ディスプレイ4にも表示され、前方の安全確認に利用することができる。
(もっと読む)
車両運転支援装置
【課題】運転者の運転操作を適切に支援して利便性を向上させる。
【解決手段】車両運転支援装置10は、自車両の外界周辺領域を撮像して画像を出力する複数の各カメラ11a,…,11dと、各カメラ11a,…,11dから出力される画像と、自車両の駐車動作時の運転支援用のガイド表示とを重畳して、表示装置19に表示する表示制御部45とを備え、表示制御部45は、駐車動作の実行時の運転操作を指示するヘルプ表示を、運転操作を構成する複数の操作工程に対応したヘルプ表示の箇所のみを順次強調しつつ、表示装置19に表示する。
(もっと読む)
車両周囲監視装置
【課題】車両の外界周辺領域の画像の表示切替に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両周囲監視装置10は、自車両の外界周辺領域を撮像して画像を出力する複数の各カメラ11a,…,11dと、各カメラ11a,…,11dから出力される画像を視点変換して変換画像を出力する画像処理部42と、画像処理部42から出力される変換画像と、各カメラ11a,11bから出力される自車両の前方領域または後方領域の画像とを、表示装置19に表示する表示制御部45とを備え、表示制御部45は、前方領域または後方領域の画像の表示状態に関わらずに、変換画像の表示状態を一定に維持する。
(もっと読む)
車両周辺監視装置
【課題】車両の左右旋回による左右側方画像におけるオプティカルフローの演算を簡素化し、移動物体認識のための画像処理の容易化を図れる車両周辺監視装置を提供する。
【解決手段】自車両Cの互いに異なる場所に設置された複数の撮像装置1によって撮影された側方画像Gsをもとに、自車両の上方の仮想視点Bpから見た俯瞰画像である車両周辺画像Gfを生成する車両周辺画像生成手段2と、車両周辺画像中の特徴点Pを抽出すると共に同特徴点の動きベクトルを計算する特徴点抽出手段3と、特徴点の動きベクトルから自車両のヨーレイトωを算出するヨーレイト算出手段4と、側方画像を画面に表示可能なモニタ5と、側方画像中より抽出した特徴点Qのフローよりヨーレイト分を減じることで得られた補正特徴点Q’に基づきモニタ画像内の対向物体に対する認識処理を行う対向物体認識手段6と、を具備した。
(もっと読む)
81 - 100 / 344
[ Back to top ]