
Fターム[5H209GG05]の内容
Fターム[5H209GG05]に分類される特許
1 - 20 / 31
ポジショナ
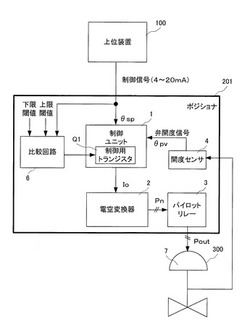
【課題】調整電流のループに電子スイッチを配置することなく、ソフトウェアに依存しない緊急遮断機能を得る。
【解決手段】比較回路6において、上位装置100からの制御信号の値とその制御信号に対して定められている正常範囲とを比較し、その比較結果を制御ユニット1に送るようにする。制御ユニット1は、比較回路6より制御信号の値が正常範囲を逸脱している旨の比較結果が送られてきた場合、制御信号が示す値(設定開度θsp)と弁開度信号が示す値(実開度θpv)との偏差に拘わらず、電空変換器2への電流信号(調整電流)Ioを強制的に調整して零とする。この制御ユニット1における電流の調整は、制御ユニット1が有している通常の機能、すなわちθspとθpvとの偏差に応じて電流信号(調整電流)Ioの値を連続的に変化させる機能を利用して行われる。
(もっと読む)
フィールド機器

【課題】不安定な状態で動作することによる不具合の発生を防止する。
【解決手段】動作電源生成回路3からの本体回路2への動作電源V2の供給ラインLAに切替スイッチSW1を設ける。切替スイッチSW1のオン/オフの状態(閉状態/開状態)を制御する制御回路部5として電流検出回路6と比較判定回路7とを設ける。電流検出回路6は、上位側システム200からの供給電流Iの値に応じた電圧Vsを入力とし、この電圧Vsを反転増幅して出力電圧Vcとする。比較判定回路7は、電流検出回路6からの出力電圧Vcを入力とし、この出力電圧Vcと基準電圧Vdとを比較し、出力電圧Vcが基準電圧Vdよりも高くなった場合に、切替スイッチSW1をオンとする。基準電圧Vdは本体回路2を正常に動作させるために必要な供給電流Iの下限電流値に応ずる値として予め定められている。
(もっと読む)
誤出力防止回路及び誤出力防止システム
【課題】マスター出力に異常が生じ、制御出力部に誤った制御出力許可が連続してなされる場合に、この誤った制御出力許可を停止し、誤出力を防止する。
【解決手段】制御出力モジュール2は、PLC6の指令によって、制御対象設備の動作を制御するための第1及び第2の制御出力を制御対象設備4に行う。マスター出力モジュール1は、PLC6の指令によって、制御出力モジュール2に供給する駆動電源の継続又は切断を切替え、制御出力モジュール2が第1及び第2の制御出力を行うことの許否を行う。タイマーリレー32が計時する第1の期間が予め指定した期間より長い場合に、タイマーリレー32は、接点32′をオフし、タイマーリレー32が駆動電源の供給を遮断することによって、制御出力モジュール2が制御対象設備4に行う第1及び第2の制御出力を停止する。
(もっと読む)
緊急遮断システム
【課題】複数の電流ループを用いることなく緊急遮断弁の確実な位置決を一般的に可能にする緊急遮断システムを提供する。
【解決手段】緊急遮断システムは、緊急遮断弁と、緊急遮断弁の位置決めを決定する信号を搬送する制御回線と、緊急遮断弁の位置決めを実現する制御回線に結合されたソレノイド組立体と、制御回線およびソレノイド組立体に結合されたに中継器とを備えている。ソレノイド弁アクチュエータ32が弁34の位置を気圧式に切り替えるのに失敗した場合、DVC20は、供給導管26からの気圧用供給圧力を、弁組立体16の移行を実現するように導くようになっている。このようにして、緊急遮断システム10は、正常状態で供給導管26を通じて供給される気圧用供給圧力の逃がしの重複的な制御を提供することにより、緊急時に、安全弁40を安全な状態に移行させるようになっている。
(もっと読む)
原子力発電プラント制御システムおよび原子力発電プラント検査方法
【課題】原子力発電プラントの運転中に試験を実施することができる原子力発電プラント制御システムおよび原子力発電プラント検査方法を提供すること。
【解決手段】原子力発電プラント制御システム1は、制御対象装置40を制御するための操作を受け付ける制御ボタン21と、制御ボタン21が受け付けた操作に対応する制御信号が操作盤20から制御対象装置40へとつながる経路上の所定の位置へ伝達されたことを通知する通知ランプ12と、試験許可ボタン11が受け付けた操作に応じて、経路上の前記所定の位置から制御対象装置40までの途中において、制御信号が制御対象装置40へ到達することを阻止する制御信号阻止部33とを備える。
(もっと読む)
プラントの制御システム
【課題】複数のデジタル制御装置を使用しつつ、デジタル制御装置が故障しても、プラントを安全に運転することができるプラントの制御システムを提供する。
【解決手段】複数のデジタル制御装置41を使用して、原子力施設1等のプラントを制御するプラントの制御システムにおいて、複数のデジタル制御装置41は、複数の制御機能46−56を有しており、複数の制御機能46−56は、安全解析によって予め設定された安全基準を下回らないように、複数のデジタル制御装置41に分散させて設けられている。
(もっと読む)
フィールド機器
【課題】外部メモリ異常時における機器制御部の処理を簡易にし、異常なデータによる動作の暴走を防ぐことを可能とするフィールド機器を実現する。
【解決手段】初期値データを保持する内部メモリと、前記初期値データがコピーされた外部メモリと、外部メモリアクセス部を介して前記外部メモリにアクセスする機器制御部とを具備するフィールド機器において、
前記外部メモリアクセス部は、前記外部メモリからのデータ不正情報を取得し、前記内部メモリより当該不正データの初期値データを取得して復旧させる、復旧処理手段を備える。
(もっと読む)
サーボシステム、サーボモータ駆動装置、セーフティユニットおよびサーボシステムの制御方法
【課題】サーボシステムに用いられるエンコーダを、安全機能を有するものに入れ替えることなく、サーボシステムの安全化を図る。
【解決手段】サーボドライバ4は、コントローラ5からの指令信号に基づいて、サーボモータ2の動作に関する指令値を設定する。サーボドライバ4は、その指令値およびフィードバック信号から得られたフィードバック値をセーフティユニット10に送信する。サーボドライバ4から送られた指令値およびフィードバック値の少なくとも一方の値が異常である場合に、STO信号を発生させるとともに、そのSTO信号をサーボドライバ4に送信する。サーボドライバ4にSTO信号が入力された場合、サーボドライバ4はサーボモータ2への電力の供給を停止する。従来から使用されていたエンコーダを用いて安全規格に適合したサーボシステムを構築することが可能となる。
(もっと読む)
バルブ制御システムおよびバルブ制御方法
【課題】設計、維持等を容易としつつ安全規格に対応可能なバルブ制御システム、およびその制御方法を提供する。
【解決手段】バルブ制御システム50は、流体を流すための配管1に設けられた汎用バルブ11,12と、センサ13,14と、安全コントローラ20とを備える。汎用バルブ11,12は電気信号によって開閉可能なバルブであり、たとえばソレノイドバルブである。センサ13,14は、対応するバルブからの流体の流出状況を検出するセンサであり、たとえば圧力スイッチにより構成される。安全コントローラ20は、安全規格を満たすように構成されるとともに、センサ13からの信号in1およびセンサからの信号in2にに基づいて、バルブ11,12を制御するための信号out1,out2を出力する。
(もっと読む)
システム設定可能な安全制御装置を有する安全装置
【課題】添付書類を見なければ、ロータリースイッチの位置と制御プログラムとの関係を直接的に確認できない。
【解決手段】システム設定が可能な安全制御装置10が、センサを接続するための少なくとも1つの入力部18、アクチュエータに接続するための少なくとも1つの出力部22及び1つの制御ユニットを有し、該制御ユニットが、論理規則に基づき入力部18における入力信号に応じて出力部22への制御信号を生成する制御プログラムを実行し、その際、論理規則がシステム設定装置によって設定される。この場合、システム設定装置の中で論理規則を表現する数値コードが作成可能であり、安全制御装置10が数値コード入力用のインターフェース30を有し、かつ制御ユニットが、数値コードにより表現される論理規則で制御プログラムを実行するように構成されている。
(もっと読む)
制御システム
【課題】より簡易な構成によって安全規格に適合可能な制御システムを提供する。
【解決手段】負荷駆動システム100は、入力機器としてのドアスイッチ11と、電力供給部12と、PLC13とを備える。電力供給部12は、ドアスイッチ11からの信号に基づいて、モータ2への交流電力の供給およびモータ2への交流電力の供給を遮断するように構成される。PLC13は、ドアスイッチ11および電力供給部12(コンタクタ21)を監視するとともに、その監視結果をコンタクタ22に出力する。PLC13は、機器を監視する機能およびその監視結果を出力する機能を有するものの、安全関連の制御を実行する機能を有していない。ドアスイッチ11およびコンタクタ21のいずれか一方が異常であることがPLC13によって検出された場合、コンタクタ22は、そのPLC13の監視結果によってオフされる。
(もっと読む)
デジタル安全保護系システム
【課題】デジタル安全保護系システムの共通要因故障対応のバックアップ回路の増大を抑制する。
【解決手段】安全保護系システムは、原子炉停止系を制御するRPS制御部61と工学的安全施設を制御するESF制御部62有する。RPS制御部61は、内部に形成される回路31、33が書き換え可能なFPGA素子30を用いて、受信したプラント状態信号と予め定められた設定値とを比較するRPS設定値比較部3a〜3dと、比較結果に基づいてFPGA素子30を用いて原子炉のスクラム弁を動作させる信号を出力するRPS論理回路部4a〜4dを有する。ESF制御部62は、ソフトウェアを介して回路41、43を形成するCPU素子40を用いて、プラント状態信号と予め定められた設定値とを比較するESF設定値比較部7a〜7dと、比較結果に基づいてCPU素子40を用いてプラント機器を動作させる信号を出力するESF論理回路部8a〜8cを有する。
(もっと読む)
安全関連制御ユニット用アプリケーションプログラムの生成方法および装置
【課題】ユーザプログラムの生成ひいては安全コントローラの製造の柔軟性をさらに向上させて安全コントローラの迅速かつ安価なプログラミングを可能とする。
【解決手段】ユーザプログラムのソースコード(52)を生成するステップであって、前記ソースコード(52)が前記アクチュエータ(24)を制御するための複数の制御命令(160, 162)および診断レポートを生成するための複数の診断命令(164, 166)を含み、前記制御命令(160, 162)の実行中に安全関連プログラム変数がフェイルセーフ的に処理されるステップと、前記ソースコード(52)に基づいてマシンコード(70)を生成するステップと、少なくとも1つのチェックサム(102, 104)を決定するステップであって、前記チェックサム(102, 104)が前記マシンコード(70)の少なくとも一部に対して決定され、前記チェックサム(102, 104)の決定に際して前記診断命令(164, 166)が無視されるステップと、を含む方法。
(もっと読む)
整圧器システム
【課題】既存の整圧器に対しても容易に設置することができ、また地震時において確実にガスの供給を停止できる整圧器システムを提供する。
【解決手段】主整圧器3とパイロット整圧弁13とを有し、主整圧器3内のガス圧力を抜くことにより作動させるアンローディング型整圧器において、主整圧器3とパイロット整圧弁13を繋ぐ第2パイロット経路11に設けられた操作弁15と、地震を感知したときに感知信号を発信する地震感知器19と、地震感知器19の発信する感知信号を入力し、該感知信号が予め設定された値を超えていると判断されたときに操作弁15を閉止する制御装置17とを備えたことを特徴とする整圧器システム。
(もっと読む)
ガス器具監視装置
【課題】ガス圧調整器との通信により自動ガス圧検査を行うガス器具監視装置を提供する。
【解決手段】流量計測手段17と、ガス遮断弁2cと、流量計測手段17の計測結果に基づく各種情報を処理する制御回路10aと、複数の相手先と情報の送受信を行う無線モジュール11と、相手先に応じて通信周波数帯を切り替える通信切替手段10cとを備え、無線モジュール11は、流量計測手段17を構成する制御回路基板10と一体的に構成してガスメータ2内に収納し、少なくとも基地局14との通信周波数帯とガス圧調節器22との通信周波数帯を有し、基地局14からのガス圧検査指令により、「流量なし」を検出したときガス圧異常判断手段27によるガス圧調整手段22aの調整圧力確認モードを実行し、「ガス圧異常」と判断したとき、ボンベ側無線モジュール11dを介してボンベ側遮断弁22cを作動しガス供給経路を遮断するような構成としてある。
(もっと読む)
ガス遮断装置
【課題】強制遮断機能を使用したいたずらを防止する。
【解決手段】再入力判定部13が、強制遮断入力手段5からの強制遮断信号を受け取り、第1のカウンタが所定時間を経過したのち作動を開始する第2のカウンタの計時動作中に再度、強制遮断入力手段5からの強制遮断信号を受け取ったとき強制閉栓信号を出力するようにした。
(もっと読む)
ガス遮断装置
【課題】地震発生状況に応じて遮断装置の復帰を禁止することで、二次災害の発生を防止して被害の拡大を抑えることを目的とする。
【解決手段】流量を計測し流量情報として出力する流量計測処理手段17と、地震等の振動を検知する感震装置21と、各情報によりガスの遮断が必要であるか否かを判断する制御装置10と、制御装置10からの遮断判定信号でガスを遮断する遮断装置2cと、遮断装置2cの作動後に所定の安全確認処理を行って自動的に復帰動作を実行する復帰手段22と、少なくとも基地局14とキャリアダイレクトで通信が可能な無線モジュール11とを備え、無線モジュール11は、制御装置10と一体的に構成してガスメータ2内に収納し、基地局14より送信される復帰禁止指令を無線モジュール11が受信したとき、復帰手段22の自動復帰動作に優先して遮断動作を継続するようにしてある。
(もっと読む)
自動車の電子制御装置
【課題】マイコンが制御プログラム実行中に書換え設定信号がブートモード設定状態となってしまった場合でもWDT機能を継続動作させ、かつその状態における意図しないリセット発生があってもマイコンを通常動作モードで再起動することが可能となる制御装置を提供する。
【解決手段】機能上設定の切り換え可能なマイコンの動作モード設定とWDTへのオートリセットキャンセルの信号を、ECU内システム電源投入直後の状態でシステム電源が発生している間ラッチさせておく回路を有することで、マイコンが制御プログラム実行中に書換え設定信号がブートモード設定状態となってしまった場合でもWDT機能を継続動作させ、かつその状態における意図しないリセット発生があってもマイコンを通常動作モードで再起動するという目的を実現した。
(もっと読む)
ガス遮断装置
【課題】従来のガス遮断装置は、電池電源部の電圧判定時に電池電源部の内部抵抗が擬似抵抗接続後の電池電圧の過渡変化が安定した後も一定時間増加し、その後減少する事を配慮していないので電池電圧の最下点を検出しておらず、最悪は電池電圧低下検出から所定時間後に遮断弁を動作出来ない場合が考えられる。
【解決手段】擬似負荷11が動作し電池電源部9に遮断弁16動作時と等価な電流を供給させ、波形安定時間計時部12が電池電源部9の過渡電圧変化を吸収する時間だけ経過した後、電池最低電圧判定部14が電池電圧を一定時間入力しその時の最低電圧で電圧低下検出判定を行うため電池の内部抵抗が一定時間増加後に減少する場合でも電池電圧低下検出から所定時間後に遮断弁17を動作できない問題を減じることが出来る。
(もっと読む)
ロボット制御装置
【課題】ロボットと作業者が同時に作業できるようにすること。
【解決手段】ロボット制御装置1は、ロボットのツールの位置を算出する位置算出手段10,11と、他の演算処理部において算出されたロボットのツールの位置を取得する算出位置取得手段10,11と、算出したロボットの算出位置と取得したロボットの算出位置とが一致するか否かを判断する算出位置一致判断手段10,11と、双方の算出位置が一致しない場合に、切り替え部5,6によりサーボモータに対する電力の供給を遮断する電力遮断手段10,11と、双方の算出位置が一致する場合に、ロボットのツールの位置が、作業エリア内であるか否かを判断する位置判断手段10,11と、ロボットのツールの位置が作業エリア内である場合に、サーボ制御部によるロボットの駆動を所定速度以下に減速させる駆動制御手段10,11と、を有する。
(もっと読む)
1 - 20 / 31
[ Back to top ]