
Fターム[5H209HH12]の内容
制御系の安全装置 (4,316) | 対処方法 (533) | 異常、故障発生後の処置 (422) | 動作モードの変更、変更禁止 (173)
Fターム[5H209HH12]の下位に属するFターム
Fターム[5H209HH12]に分類される特許
21 - 37 / 37
プロセス制御

【課題】プロセス制御を極力安全にする。
【解決手段】少なくとも1つのプロセスモジュールと少なくとも1つの保安モジュールとにより、少なくとも1つの制御すべきプロセス装置が制御され、保安に無関係のプロセスモジュールのプロセス信号と、プロセスの保安に関係する保安モジュールの保安信号とが互いに論理的に結合されており、ローカル保安センサの少なくとも1つのローカル保安信号が、プロセス装置に関連するローカル制御ユニットの少なくとも1つの制御出力に直接供給されると同時に、この論理結合操作を迂回して、制御出力に接続された制御すべきプロセス装置にて高速状態変更を行い、高速スイッチングパスが高速スイッチング機能を含み、この高速スイッチング機能により、論理結合操作の結果とローカル保安信号とが共に評価され、制御すべきプロセス装置での高速状態変更は再度変更され、特に、共有の評価が所定の結果を生む場合に再度反転される。
(もっと読む)
車両用電子制御装置

【課題】 車両用電子制御装置が動作チェック時に出力するチェック用異常信号を他の異常信号と区別し、チェック用異常信号であれば通信処理の禁止状態をキャンセルすることによって、通信処理開始時期に遅れがない動作チェック処理や通信可能を提供し、正常な制御処理を開始するまでの時間を短縮化する。
【解決手段】 演算制御部22は、通信部14と駆動部18に接続されており、CPU20とCPUを監視する監視部16を備えている。監視部16は、異常を検出すると異常検出信号を通信許可部10と禁止部12と駆動部18へ出力する。禁止部12は通信部14へ通信処理を禁止する禁止信号を出力するが、通信許可部10は検出された異常がどのような異常信号かを判断し、チェック用異常信号の場合には、通信部14に対し通信許可信号を出力することによって、動作チェック処理による通信処理開始の遅れをなくす。
(もっと読む)
ロボット制御装置
【課題】ロボットと作業者が同時に作業できるようにすること。
【解決手段】ロボット制御装置1は、ロボットのツールの位置を算出する位置算出手段10,11と、他の演算処理部において算出されたロボットのツールの位置を取得する算出位置取得手段10,11と、算出したロボットの算出位置と取得したロボットの算出位置とが一致するか否かを判断する算出位置一致判断手段10,11と、双方の算出位置が一致しない場合に、切り替え部5,6によりサーボモータに対する電力の供給を遮断する電力遮断手段10,11と、双方の算出位置が一致する場合に、ロボットのツールの位置が、作業エリア内であるか否かを判断する位置判断手段10,11と、ロボットのツールの位置が作業エリア内である場合に、サーボ制御部によるロボットの駆動を所定速度以下に減速させる駆動制御手段10,11と、を有する。
(もっと読む)
安全機能の作動解除のための装置及び方法
【課題】自動車の安全システムについてドライバーによる作動解除を可能にする方法および装置を提供する。
【解決手段】自動車の安全機能の作動解除のための方法において、安全機能がその作動の後は不感時間(Δts)の経過後に初めてドライバーによって作動解除されることができる(105)。
(もっと読む)
電子制御装置
【課題】外部入力信号に基づく異常検出の検出精度を高めて的確なフェールセーフ処理を実行可能な電子制御装置を提供する。
【解決手段】複数の外部入力信号INがそれぞれ入力されると共に、共通の選択信号線SEL1,SEL2からの選択信号により出力が制御される複数のマルチプレクサ回路MUX1〜MUX4を備える入力インターフェース20と、入力インターフェース20から出力される外部入力信号INの状態を異常と判断した場合には、複数のマルチプレクサ回路MUX1〜MUX4の一部について異常かを判断し、その異常判断結果に応じたフェールセーフ処理を実行する演算処理部10とを有する。これによれば、入力インターフェースの故障と外部入力信号の状態の異常とを切り分けることができ、的確なフェールセーフ処理が可能になる。
(もっと読む)
分布システムのためのフォールトトレランスのノードアーキテクチャー
【課題】分布システムで使用することができるフォールトトレランスノードアーキテクチャーを構築する。
【解決手段】バス28で作働連結された複数のノード24、26を含む分布アーキテクチャーシステムである。各ノードは、バス28及びアクチュエータ22にデータを提供する主要コントローラ42とバス28及びアクチュエータ22にデータを提供する管理コントローラ44とを備える。各ノードは、通常の作働の間に主要コントローラがアクチュエータを制御するデータをアクチュエータに提供し、管理コントローラがアクチュエータを制御するデータをアクチュエータに通常では提供しないように構成される。各ノードは、主要コントローラが不適切なデータを提供すると判定した場合、管理コントローラがアクチュエータを制御するデータをアクチュエータに提供し、主要コントローラがアクチュエータを制御するデータをアクチュエータに提供しないように構成される。
(もっと読む)
モジュラ材料処理システムのセーフティ・インターロック方式、およびその操作方法
モジュラカード製造セーフティ・インターロック・システムは、所望のシステムモジュールのフードを開けたときに、動作外乱を前記所望のシステムモジュールとその隣接のシステムモジュールのみとに限定することによって、モジュラカード製造システムの途絶を制限する。 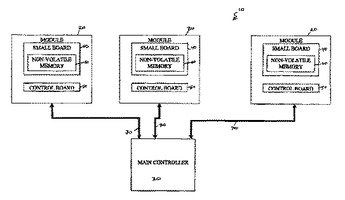 (もっと読む)
(もっと読む)
誤操作防止装置およびその制御方法
【課題】設備の誤操作防止装置を提供する。
【解決手段】水平センサ2201〜2209と、垂直センサ2211〜2216と、取扱説明を記憶する取扱説明記憶部310と、スイッチ130の操作履歴を記憶する操作履歴記憶部330と、スピーカ部810と、表示部510と、スイッチ130の操作を検知する操作検知手段150と、制御盤120の垂直位置と水平位置とから制御盤120の位置を算出し、算出された位置にあるスイッチ130を特定する操作位置判断部610とを備え、スイッチ130の設定状態と特定されたスイッチ130との組合せが、操作履歴記憶部330に記憶された誤操作履歴と一致するときに、スピーカ部810を介して警報を出力し、誤操作履歴と一致しないときにスイッチ130に対応する取扱説明の内容を取扱説明記憶部310から読み出して表示部510に出力するする誤操作防止装置である。
(もっと読む)
入力信号判定支援装置
【課題】 偏差が発生した二系列の計測値のいずれかの計測値が正しいという判断を熟練運転員によらなくても行うことができ、しかも、コントロールセンタから離れている現場まで出向かなくても正しい計測値を選択することができるようにすることである。
【解決手段】 火力プラント計器の計測値を二系列化して表示する二重化計装信号表示手段と、この二重化計装信号表示手段におけるそれぞれの表示値と過去の運転状態を総合して判定することにより定められた判定材料基準グラフとを時系列に従ってグラフ表示する表示手段と、二系列化した計装信号に偏差が生じたときにいずれかの表示値が正しいか否かを判定するために前記表示手段における判定材料基準グラフをそれぞれの表示値に重ね合わせて何れが正しいかを判定する判定手段と、正しい計装信号を示す系列に切り換えて運転する切り換え手段14とよりなる。
(もっと読む)
多機能なトータル電子制御システムにおける誤ったアクチュエータアクセスを防止する方法
様々な種類のシステムサービス(1)からアクチュエータアクセス要求が発出されて来る多機能なトータル電子制御システムでの誤ったアクチュエータアクセスを防止する方法において、このトータル制御システムには、アクチュエータアクセス要求に許可を与えるかを決定する権限管理部(2)と、動作モード制御部(4)と、アクセス管理部(6)とが統合されている。権限管理部(2)は、システムサービス(1)によるアクセス要求に対して、トータル制御システムのその時点の動作モードを考慮しつつ、所定の規則に従って、動作モードの設定又は変更を行うとともに、実際の動作モードをアクセス管理部(6)に通報する。アクセス管理部(6)は、通報されて来た全体的な動作モードに従って、「許可された」システムサービス(1)によるアクチュエータの操作を許すとともに、所定のアービトレーション規則に従って、システムサービス(1)のアクチュエータアクセス要求を処理する。  (もっと読む)
(もっと読む)
安全計装システムおよびプラント制御方法
【課題】 機械的なスイッチを排除しつつ、安全保持のための処理を必要な範囲で効果的に禁止できる安全計装システムおよびプラント制御方法を提供する。
【解決手段】 検出手段101は、プラントの異常を検出する。実行手段102は、検出手段101により異常が検出された場合に安全保持のための所定の処理を実行する。禁止手段103は、所定の要求に応じて、実行手段102による処理の実行を禁止する。受付手段104は、プラントを監視するためのマンマシンインタフェースを介して行われる、上記所定の要求を受け付ける。受付手段104は、上記所定の要求の受け付けに際してマンマシンインタフェースを介してユーザ認証を実行する認証手段105を具備し、受付手段104は認証手段105により正常に認証が行われた場合のみ、上記所定の要求を受け付ける。
(もっと読む)
プログラム制御されるユニットおよび方法
本発明は,唯一のコントロールコア(コア)を有し,そのコントロールコアが第1と少なくとも1つの第2の実施ユニットを有しており,それら実施ユニットが第1の駆動モードにおいて互いに独立して駆動可能であって,かつ第2の駆動モードにおいては同一の指令を並行に処理する,プログラム制御されるユニットに関する。  (もっと読む)
(もっと読む)
検出センサ
【課題】 機能の設定操作を有効化又は無効化させるための操作時間を状況に応じて適切に設定しうる構成を提供する。
【解決手段】 検出センサ10は、設定変更可能な1又は複数の機能を備えた構成をなし、作業者による操作が可能な第1キー12と第2キー14とを有している。本検出センサ10では、操作手段の操作に基づき、機能の設定を行うように構成され、この機能の設定に基づいて被検出対象の検出を行う構成をなしている。一方、操作手段が設定時間以上連続して操作されたことを条件として、機能の設定を有効化又は無効化する制御を行うようになっており、さらに、その設定時間を設定変更できるように構成されている。
(もっと読む)
二重化コントローラシステム、そのコントローラ
【課題】 優先レベルが高い定周期プログラムの実行周期が短い場合に優先レベルが低い定周期プログラムの実行時間が増大するという問題を解決する。
【解決手段】 CPU支援ツール5において、新たな定周期プログラムを作成してCPUモジュール1,2にダウンロードする際に、ユーザに等値化処理の有効/無効を設定させて等値化データ転送情報ファイル5aを生成し、当該ファイル5aも一緒にダウンロードする。稼動系のCPUモジュール1は、基本的には各定周期プログラムを実行する毎に等値化処理を実行するものであるが、上記ファイル5aの情報により、等値化処理の無効が設定されている定周期プログラムに関しては、等値化処理は一切行わない。
(もっと読む)
車両制御システムの復帰制御方法
電源異常の状況に応じて適切な復帰処理が行えるようにする。 記憶部102の動作状態メモリ1には、システムリセットが生じた場合に、その直前のシステムの動作状態が記憶されると共に、復帰モードメモリ2には、その記憶された動作状態に応じて定まる復帰モードが記憶されるようになっており、復帰処理の最初に、その記憶された復帰モードに基づいて必要な処理が行われる一方、復帰処理がなされる毎にリカバリカウンタ5により計数がなされると共に、システムの正常動作の時間が正常動作時間用タイマカウンタ6により計数されて、カウンタの計数値と正常動作時間とに応じて、システム停止やエンジン復帰などの処理が行われるようになっている。  (もっと読む)
(もっと読む)
操作装置
【課題】操作スイッチの操作内容と音声指示内容との整合がとれているときにのみ、プラントなどに対する操作指令を出力して、操作スイッチの誤操作に起因するプラントの停止などの事故発生を未然に防止する。
【解決手段】 操作指示を示す音声と、指令指示に対応する操作スイッチ6の操作内容とを予め登録し、音声が入力されて、操作スイッチ6が操作されたとき、音声で指定された操作指令と、操作スイッチ6の操作内容とが一致しているかどうかをチェックし、チェック内容を音声でガイダンスしながら、音声で指定された操作指令と、操作スイッチ6の操作内容とが一致しているとき、操作出力指令を生成して制御対象となっているプラントを制御する。
(もっと読む)
発電プラント制御装置
【課題】操作端ドライブモジュールの入出力点を固定せず、多様な補機に対応して任意に組み替えできるコントローラと、それを用いた配線数の少ないプラント制御装置を提供する。
【解決手段】制御用コントローラ100に付属したPDCM(操作端ドライブモジュール)200にCPU202、不揮発性メモリ203、シリアルI/F204を設け、シリアル信号線300とRTB400を介して、対象補機の関連機器とシリアル信号で送受信する。PDCM200のメモリ203には、操作端に固有の保護機能などのプログラムを記憶し、コントローラ100のダウン時、CPU202によって操作端500のホールドを行う。また、空気源510の異常時には操作端をフェイルセーフ側(全開/全閉)に操作する。PDCM200の入出力点はハード的に固定しないので、機能の増設や変更が任意に行える。
(もっと読む)
21 - 37 / 37
[ Back to top ]