
Fターム[5H223AA06]の内容
制御系の試験・監視 (13,977) | 制御対象 (2,633) | 加工、組立てシステム、製造設備 (322) | 工作機械、産業用ロボット (71)
Fターム[5H223AA06]に分類される特許
1 - 20 / 71
ロボットコントローラ
【課題】発生頻度が異なる複数のログデータについて個々の発生パターンを表示する。
【解決手段】ロボットコントローラ3は、発生頻度が異なるワーニングデータを発生順に記憶するワーニングデータ記憶領域7aとエラーデータを発生順に記憶するエラーデータ記憶領域7bとを別々に用意し、ログデータの表示要求が発生すると、それらワーニングデータ記憶領域7aに発生順に記憶されているワーニングデータとエラーデータ記憶領域7bに発生順に記憶されているエラーデータとを時系列に並替えて表示する。発生頻度の差に拘らず発生頻度が高いワーニングデータだけでなく発生頻度が低いエラーデータをも表示することができる。
(もっと読む)
音変換装置を備えた工作機械の数値制御装置

【課題】音変換手段を利用して、作業者が遠隔からでも工作機械等の機械音を確認でき、パラメータ調整の効果等を直感的に認識できるようにした数値制御装置の提供。
【解決手段】数値制御装置12は、駆動軸14を制御する駆動軸制御部16と、駆動軸14の位置及び電流等の物理量を時系列データとして取得し記憶する駆動軸データ記憶部18と、該時系列データを予め定めた表示形式に変換し、少なくとも1つの表示波形として表示する表示部20と、表示された表示波形を、作業者30が入力操作により選択することを可能にする選択部22と、選択された表示波形を音として出力可能な形式の音変換データに変換する音変換部24と、生成された音変換データを音として出力する音出力部26とを備える。
(もっと読む)
自動機械の制御装置
【課題】稼働率の低下を抑えること。
【解決手段】サーボ制御部17が、サーボモータ21の回転を制御し、異常検出部18が、サーボ制御部17への電源供給遮断状態(すなわち、サーボ制御部17によるサーボモータ21の制御が非制御の状態)において、エンコーダ23によって検出されたサーボモータ21の回転位置(エンコーダ値)を取得するとともに、取得したエンコーダ値に基づいてブレーキ22の異常を検出するように制御装置1を構成する。
(もっと読む)
加工ラインにおける工作機械のモニタ装置
【課題】リトライ回数が多いステーションを確実に特定し、サイクルタイムの延長を防止する。
【解決手段】加工ラインを構成する各ステーション1ST〜11STの工作機械を監視するモニタ装置20は、各工作機械におけるワークのクランプ装置3のソレノイド36,39及び圧力スイッチ40に接続される第1PLC8のCPUユニット10内のリトライモニタ部21と、表示器22とを備え、リトライモニタ部21は、工作機械ごとのリトライ回数をカウントするリトライカウンタを有し、リトライカウンタのカウント値を単位時間ごとに累計してその累計値をデータ記憶領域に記憶すると共に、表示器22に表示可能となっている。
(もっと読む)
稼動履歴管理方法、及び稼動履歴管理装置
【課題】びびり振動の発生状況と工作機械の稼働状況とを関連づけて把握することができ、びびり振動の容易で且つ効果的な抑制を図ることができる稼動履歴管理方法、及び稼動履歴管理装置を提供する。
【解決手段】少なくとも回転軸の回転速度及び周波数領域の振動加速度を稼動履歴として記憶するとともに、当該稼動履歴を、回転軸の回転速度が変化した場合のみならず、周波数領域の振動加速度の最大値が所定の閾値を超えた場合にも記憶するため、回転軸の回転速度の変化とびびり振動の発生状況とを関連づけて記憶することができる。したがって、作業者は回転軸の回転速度とびびり振動の発生状況とを関連づけて把握することができ、ひいてはびびり振動の容易且つ効果的な抑制を図ることができる。
(もっと読む)
移動体の分散制御システム
【課題】副制御ユニットに接続された電装部品に関連する異常があった場合に、通信負荷を軽減して、異常に対する対応を迅速にする。
【解決手段】電装部品50のそれぞれに対応して設けられ、記憶装置(内蔵RAM23、不揮発性SRAM25)と、電装部品50に接続された副制御装置21とを有する複数の副制御ユニット(スレーブ基板20)と、副制御ユニットに指令を送信することで移動体の動作を制御する主制御ユニット(マスタ基板10)とを備え、副制御ユニットは、接続された電装部品50に関連する異常を検出した場合に、当該異常の種類に応じて移動体が行うべき動作を示す情報である動作要求データを主制御ユニットに送信するとともに、異常の詳細を示すエラー・ステータス・データを主制御ユニットに送信せず記憶装置に記憶させるように移動体の分散制御システムを構成する。
(もっと読む)
シミュレーション装置
【課題】被制御装置の模擬が実行可能になるまでに要する時間が短く、且つ、被制御装置を正確に模擬することができるシミュレーション装置を提供する。
【解決手段】シミュレーション装置20は、制御装置10の制御対象である被制御装置を模擬するものであって、被制御装置を構成する機器毎の特性を示す情報が格納された設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が予め設定された基準速度よりも速い機器を模擬するシミュレーションPLC21と、上記の設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が基準速度よりも遅い機器を模擬するシミュレーションPC22とを備える。
(もっと読む)
システム設定可能な安全制御装置を有する安全装置
【課題】添付書類を見なければ、ロータリースイッチの位置と制御プログラムとの関係を直接的に確認できない。
【解決手段】システム設定が可能な安全制御装置10が、センサを接続するための少なくとも1つの入力部18、アクチュエータに接続するための少なくとも1つの出力部22及び1つの制御ユニットを有し、該制御ユニットが、論理規則に基づき入力部18における入力信号に応じて出力部22への制御信号を生成する制御プログラムを実行し、その際、論理規則がシステム設定装置によって設定される。この場合、システム設定装置の中で論理規則を表現する数値コードが作成可能であり、安全制御装置10が数値コード入力用のインターフェース30を有し、かつ制御ユニットが、数値コードにより表現される論理規則で制御プログラムを実行するように構成されている。
(もっと読む)
圧縮機を診断するための方法およびシステム
圧縮機を診断するための方法、システムおよびコンピュータソフトウェア。その方法は、圧縮機の様々な部分の状態を説明する成分を含む圧縮機の特徴ベクトルを生成するステップ、ファジィ制約に基づいて、特徴ベクトルに対応する集約異常ベクトルを決定するステップ、圧縮機の考えられる障害/故障モードのプリセットリスト用の規則を定義するステップ、集約異常ベクトルと規則との間の補強尺度を算出するステップ、ならびに、補強尺度の結果に基づいて、圧縮機の障害/故障モードを特定するステップを含む。 (もっと読む)
情報処理装置および情報処理装置の制御方法
【課題】
複数のハードウェア部品に対して複数の制御方法を実行する装置に対して、ハードウェア部品の劣化した場合にも出来る限りハードウェア部品を交換せず、少ない計算量、又は、高い処理性能を維持しながら制御の信頼性を確保することである。
【解決手段】
制御部は、制御対象部の制御に用いる制御ロジックを、制御対象部の状態に基づいて一時的に設定し、制御ロジックにより制御対象部を制御して得られる第一の値と、制御ロジックを用いて制御対象部を制御した場合に得られると想定される第二の値とを比較し、第一の値と前記第二の値の比較結果に応じて、制御対象部の制御に用いる制御ロジックを決定する。
(もっと読む)
システム同定方法及びシステム同定装置
【課題】 誤った推定を与えないM系列信号を生成してシステム同定を行うシステム同定方法及びシステム同定装置を提供する。
【解決手段】 第1のサンプリング周期T1、及び、第1のシフトレジスタ数n1で特徴付けられる第1のM系列信号と、第1のサンプリング周期T1と異なる第2のサンプリング周期T2、及び、第2のシフトレジスタ数n2で特徴付けられる第2のM系列信号とを合成して第3のM系列信号を生成し、これを入力信号としてシステム同定を行う。
(もっと読む)
ロボット管理システム、ロボット管理端末、ロボット管理方法およびプログラム
【課題】地図データの作り直しの要否をロボットの管理者に通知することを目的とする。
【解決手段】レーザ計測により、障害物を検知しながら経路を進行するロボット2と、地図データ321を記憶し、ロボット2に進行経路を指示するロボット管理端末3と、を有するロボット管理システム1であって、経路を進行中のロボット2が、レーザ計測結果であるセンサデータ324をロボット管理端末3へ送信し、ロボット管理端末3が、ロボット2から送信されたセンサデータ324を基に、ロボット2の進行経路に沿って、ロボット2が移動した将来の位置におけるシミュレーションセンサデータ325を予測し、予シミュレーションセンサデータ325と、地図データ321との不一致部分の割合が、予め設定してある閾値より大きい場合、地図データ321の再作成をユーザに通知することを特徴とする。
(もっと読む)
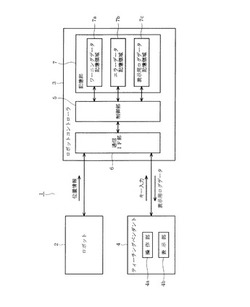
異種自律作業の監視及び制御
種々の有利な実施形態は、任意の数のロボットマシングループと、ミッションプランナーと、ミッション制御部とを含むことができる装置を提供することができる。ミッションプランナーは、任意の数のロボットマシングループのミッションを設定することができる。ミッション制御部は、任意の数のロボットマシングループを使用してミッションを実行することができる。  (もっと読む)
(もっと読む)
安全監視入力装置
【課題】安全状態の監視に使用される信号経路を遮断することなく、その信号経路の安全状態を監視すること。
【解決手段】安全監視入力装置13は、非常停止ボタン16にてオン/オフされる信号経路上にパルス列信号Sを送出し、そのパルス列信号Sの検出結果に基づいて、非常停止ボタン16にてオン/オフされる信号経路の安全状態を判定する。
(もっと読む)
パラメータ推定装置
【課題】作業状況の変化によって生じるアクチュエータの制御パラメータの変化量を高精度で推定することができるパラメータ推定装置を提供する。
【解決手段】コントローラ6は、フィードバックループのゲインを測定するループゲイン測定手段23と、ループゲイン測定手段23により測定されたゲインが一定となるように該ゲインの調整値を決定するゲイン交点制御手段24と、ゲイン交点制御手段24により決定されたゲインの調整値から、アクチュエータ5の制御パラメータの規定値に対する変化量を推定するパラメータ推定手段28とを備える。
(もっと読む)
複数のファンクションキーを有する数値制御装置
【課題】複数のアプリケーションソフトウェアのウィンドウを表示している場合、ウィンドウの配置やサイズの変化に応じて、汎用キーの押下情報を受取るウィンドウをダイナミックに切り替える。
【解決手段】画面レイアウト毎に汎用キー43がどのウィンドウの操作を行うかを定義した定義データを記憶する定義データファイル5と、前記画面レイアウトと前記定義データとの対応付けした画面リストファイル4と、表示される画面レイアウトの変更を監視し、変更があったときに画面レイアウトの定義データを定義データファイル5から選択して読み込むと共に、汎用キー43の押下を監視し、該定義データに基づいて指定されたウィンドウにファンクションキーが押下されたことを通知するキー入力監視ソフトウェア1とを有し、通知されたファンクションキーに応じて前記アプリケーションの操作が行われることを特徴とする複数のファンクションキーを有する数値制御装置。
(もっと読む)
機器状態情報収集方法、及び、それに用いる機器状態情報収集キット
【課題】多数の管理対象機器の的確な機器状態情報を効率的に収集する。
【解決手段】機器管理用の機器状態情報を収集する多数の管理対象機器2を、機器状態検知用の可搬ユニット4の各管理対象機器2への検知操作で機器状態情報を収集する直接収集グループ7と、管理対象機器2の機器状態情報を検知可能な状態で設置された機器状態検知用の固定ユニット5、6との通信で機器状態情報を収集する間接収集グループ8a、8bとにグループ分けする。
(もっと読む)
自動化システムを制御する安全コントローラおよびその制御方法
【課題】制御される設備の確認されたプロセス状態または安全コントローラのシステム状態を表す情報の伝達をより簡単かつよりフレキシブルに、特に表示される情報を外部の状況に合わせて調整できるようにする。
【解決手段】安全コントローラ22は、センサによって複数の制御入力信号32が供給され、制御ユニットでランするユーザプログラム38に従い制御入力信号に基づいて自動モードで複数の制御出力信号34を生成し、前記複数の制御出力信号34を使用して複数のアクチュエータ16を起動する。複数の診断入力信号66が供給され、診断入力信号に基づいて複数の作動状態122のうちどれがある決まった時点に存在するか確認するように設計されており、確認された作動状態を表す作動状態データ記録68を生成する診断評価ユニット64と、診断レポートを表示するように設計されているディスプレイユニット72用のインターフェース70とを有する。作動状態データ記録68は、複数の診断データとブール型ステータスインジケータとを有し、制御ユニット22は、ブール型ステータスインジケータに基づいて少なくとも1つのアクチュエータを起動するように設計されている。
(もっと読む)
ロボットコントローラ
【課題】発生頻度が異なる複数のログデータについて個々の発生パターンを表示する。
【解決手段】ロボットコントローラ3は、発生頻度が異なるワーニングデータを発生順に記憶するワーニングデータ記憶領域7aとエラーデータを発生順に記憶するエラーデータ記憶領域7bとを別々に用意し、ログデータの表示要求が発生すると、それらワーニングデータ記憶領域7aに発生順に記憶されているワーニングデータとエラーデータ記憶領域7bに発生順に記憶されているエラーデータとを時系列に並替えて表示する。発生頻度の差に拘らず発生頻度が高いワーニングデータだけでなく発生頻度が低いエラーデータをも表示することができる。
(もっと読む)
圧縮空気流量監視装置
【課題】加工機械において、圧縮空気の漏れの部位を判断できるようにする。
【解決手段】圧縮空気流量監視装置は、複数の空圧機器と、流量計と、複数の切換弁と、流量監視部と、表示部と、を備えている。複数の空圧機器は、加工機械に設けられ、空圧源から供給される圧縮空気を用いて動作する機器である。流量計は、コンプレッサから複数の空圧機器に供給される圧縮空気の流量を測定する。切換弁は、コンプレッサと複数の空圧機器との間に各空圧機器に対応して設けられ、複数の空圧機器に圧縮空気を供給・遮断する。流量監視部は、複数の空圧機器のいずれか一つに圧縮空気を供給し、その他の空圧機器に圧縮空気を供給しないように複数の切換弁を制御する。表示部は、流量監視部の制御によりいずれか一つの空圧機器が制御されたとき、流量計で測定された測定流量を表示する。
(もっと読む)
1 - 20 / 71
[ Back to top ]