
Fターム[5H301DD01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動開始時に与え移動体内に保持するもの (492)
Fターム[5H301DD01]の下位に属するFターム
ティーチングによって作成されるもの (52)
Fターム[5H301DD01]に分類される特許
1 - 20 / 440
無人車両
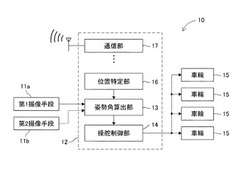
【課題】誘導ラインが途中で断線していたとしても、姿勢角を修正しながら安定して走行し続けることができる無人車両を提供する。
【解決手段】本発明に係る無人車両10は、車長方向に延びる車体中心線上に離間して設けられ、路面の画像データをそれぞれ出力する第1撮像手段11aおよび第2撮像手段11bと、画像データに基づいて姿勢角を算出する姿勢角算出部13と、姿勢角が目標値になるように車輪15の操舵角を制御する操舵制御部14とを備える。姿勢角算出部13は、第1撮像手段11aおよび第2撮像手段11bから出力された2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第1算出動作、および第1撮像手段11aまたは第2撮像手段11bから出力された1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第2算出動作を選択的に行う。
(もっと読む)
サービス制御システム、サービスシステム

【課題】機械が実世界の状態に基づき実世界に対し有用な働きかけを行うサービスシステムにおいて、環境条件や目的等が変化したときでも、その働きかけがより適切なものとなるように変化させる。
【解決手段】本発明に係るサービス制御システムは、実世界インターフェースシステムが備える第1観測部とは異なる物理環境を観測する第2観測部を備え、実世界インターフェースシステムが第1観測部の観測結果に基づき動作した場合と第2観測部の観測結果に基づき動作した場合との間の差分が小さくなるように、実世界インターフェースシステムの動作を調整する。
(もっと読む)
改札案内ロボット
【課題】自動改札機でICカードをうまく使えない利用者に対して再タッチ行為を行えるように迅速に、丁寧に、分かりやすく応対できる改札案内ロボットを提供する。
【解決手段】改札案内ロボット10は、自律移動型の装置構成(12,43,44)と案内情報提供部(22)とロボット制御装置41を備え、必要が生じたときに自動改札機31に接近してその改札機能を補助・支援する。自動改札機の無線通信装置37と間で相互に情報の送受を行う無線通信装置42と、ICカードリーダ・ライタと、ICカード処理装置45とを備える。自動改札機でICカード処理未了が生じたとき、自動改札機からの出動指令に基づいて自動改札機に接近し、通行不能状態にある利用者に対し案内情報提供部を介して自身のICカードリーダ・ライタへのICカードタッチ行為を促す。
(もっと読む)
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
水中移動型検査装置及び水中検査設備
【課題】 海底構造物等の検査対象物が航走体の質量に基づく力を受けて損傷することを防止できるようにすると共に、検査対象物の検査を含む各種作業の質の向上を図ること。
【解決手段】 航走しながら海底パイプライン(検査対象物)13を検査することができる水中移動型検査装置11であって、潜水して、海底パイプライン13に対して非接触状態で検査対象物を辿りながら航走する航走体14と、この航走体14に設けられている第1可動アーム部16と、この第1可動アーム部16に設けられ、海底パイプライン13を検査するための検査用ツール部17と、航走体14が、海底パイプライン13に対して非接触状態で辿りながら航走するときに、第1可動アーム部16を作動させて、検査用ツール部17が海底パイプライン13に対して所定の目標位置関係となるように、検査用ツール部17を移動させることができる制御部とを備える。
(もっと読む)
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
移動体の走行制御装置、走行制御方法、走行制御プログラム
【課題】移動体が外部環境との衝突を回避しながら走行するのに必要となる計算コストを抑制する技術を提供する。
【解決手段】自立走行ロボット1の走行を制御する走行制御部6は、進行方向側に存在する外部環境と、基準点Aと、の間の距離を計測して複数の距離データを生成する距離データ生成部60と、複数の距離データのうち、基準点Aから見て進行方向右側に分類されるものであって、最も小さい距離データを右側最短距離データDminRとして抽出し、複数の距離データのうち、基準点Aから見て進行方向左側に分類されるものであって、最も小さい距離データを左側最短距離データDminLとして抽出する、最短距離抽出部61と、自立走行ロボット1が外部環境との衝突を回避するのに必要となる旋回角θRAを決定する旋回角決定部62と、を備える。
(もっと読む)
自律移動体
【課題】自律移動体が移動する障害物を避けながら移動する際に、障害物に接近しすぎることがなく、障害物が移動する流れに沿って移動しながら目的地に到達する経路を探索する自律移動体を提供する。
【解決手段】自律移動体と移動障害物の間に仮想粘性力と仮想斥力が作用するとし、経路探索技術で用いる移動コストに仮想粘性力と仮想斥力を含める。また、分岐点を仮に選択して移動コストを計算する際には、その分岐点を通過する時点における移動障害物の位置と速度を予測して仮想粘性力と仮想斥力を計算する。移動障害物に接近しすぎると移動コストが増大し、移動障害物の流れに沿って移動すると移動コストが低下することから、移動障害物に接近しすぎることがなく、しかも移動障害物の流れに沿って移動する経路が探索される。
(もっと読む)
自己位置推定装置、自己位置推定方法およびプログラム
【課題】自己位置を正確に推定することが可能な自己位置推定装置、自己位置推定方法およびプログラムを提供する。
【解決手段】自己位置推定装置は、撮影部、距離算出部、ランドマーク位置取得部、自己位置推定部、移動位置予測部、観測尤度計算部、視野内ランドマーク抽出部、撮影角度変更部、撮影制御部を有している。ランドマーク位置取得部は、各ランドマークの位置を取得する。自己位置推定部は、取得された画像、算出された距離、および上記位置に基づき自己位置を推定する。移動位置予測部は、推定された自己位置に基づき予測位置を算出する。撮影角度変更部は、視野内ランドマーク抽出部が抽出した視野内ランドマークについて観測尤度計算部が計算した観測尤度と、視野内ランドマークの観測角度とに応じて撮影角度を変更する。撮影制御部は、変更後の撮影角度で撮影した画像に基づき自己位置を更新する。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
自動走行車および自動走行システム
【課題】走行位置検出におけるノイズの影響を受けにくく、トラブル発生時の再発車等も容易な自動走行車を用いた自動走行システムを提供する。
【解決手段】自動走行車1は、走路上の走行が可能な車台部10と、走路上に設けられた誘導線21を検出する誘導線センサ2と、誘導線センサにより検出された誘導線に沿って車台部を走行させるとともに、誘導線に設けられた制御情報24,25を読み取る情報読み取り部を備えたコントローラ4と、走路上に誘導線とは別に設けられた色ガイド31,32の色を検出する色センサとを有する。コントローラは、色センサにより検出された色ガイドの色と情報読み取り部により読み取った制御情報とに応じて車台部の制御を行う。
(もっと読む)
移動体の位置・姿勢推定システム
【課題】走行開始時の自律移動ロボットの位置・姿勢の推定にかかる時間を短縮し、高速応答の走行制御を可能とする。
【解決手段】距離センサ3の測定結果から得られた距離和データに対して、これに近似した距離和地図データ群内の距離和データを検索し、その結果に基づいて自律移動ロボットの位置・姿勢を推定するマッチング処理を行う。このとき、マッチング処理の探索条件を複数用意しておく。第1の探索条件は、走行履歴に含まれる距離和地図データの中で自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。第2の探索条件は、予め設定した経路上での自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。第3の探索条件は、通路内での位置・姿勢の距離和地図データとする。最終の探索条件は、地図データ内で自律移動ロボット1が取り得る位置・姿勢の距離和地図データとする。
(もっと読む)
コークス消火電車の減速停止制御方法及び装置
【課題】消火電車の駆動輪のスリップによる消火電車の目標速度と実速度との間の速度偏差が大きくなっても、消火電車の自動運転のダウンタイムの発生を防止又は低減することができ、その結果、コークスの生産量を増加させることができるコークス消火電車の減速停止制御方法及び装置を提供する。
【解決手段】コークス消火電車を駆動する電動機をインバータによって制御して消火電車の自動走行速度制御を行う際に、消火電車を目標停止位置の手前に設けた減速開始点から減速させ、目標停止位置で停止させるコークス消火電車の減速停止制御方法であって、消火電車の減速時において、予め設定された目標速度と測定された実速度との速度偏差を監視し、この速度偏差が設定値を超えた場合には、消火電車のブレーキを動作させて強制的に消火電車を減速し、速度偏差が設定値以下に戻った場合には、消火電車のブレーキを開放し、インバータによる自動走行速度制御に戻すことにより、上記課題を解決する。
(もっと読む)
自律走行装置及び自律走行方法並びにそのプログラム
【課題】分岐路のある道路でも白線などのガイド線を用いずに自律走行が可能となる自律走行装置を提供する。
【解決手段】周囲の検出範囲の接地面に仮想的に設けた点範囲それぞれの高さを検出し、近傍の点範囲との高さの差が路肩検出基準値以上となる場合の点範囲を、路肩点を示す点範囲と検出する。そして、検出範囲内における基準経路の左右両側それぞれにおいて検出した路肩点を左右両側ごとにそれぞれ結んだ左右両側それぞれの路肩線を特定し、当該左右両側それぞれの路肩線に基づいて道路形状を認識する。また、検出範囲内の左右の路肩線の間に仮想的に設けた複数の経路候補が示す点範囲を特定し、当該経路候補が示す各点範囲の高さと、当該経路候補が示す点範囲隣接する他の点範囲の高さとの変化量の小さい経路候補を走行経路と特定する。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
歩行ロボット装置及びその制御プログラム
【課題】環境地図の作成と自己位置推定を、求められる精度を確保しつつ、安価に実現することのできる歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】環境地図を作成する機能は、2ヶ所において撮影した地図作成用環境画像から撮影対象物を示す代表点を抽出し、代表点の位置と撮影した位置座標とから撮影対象物の位置座標を求め、撮影した地図作成用環境画像、代表点の位置及び前記撮影対象物の位置座標とを関連付けた環境地図を作成する。自己位置を推定する機能は、任意の位置座標において撮影した位置推定用環境画像中の撮影対象物の代表点に、対応する地図作成用環境画像中の撮影対象物の位置座標を対応させ、交会法によって前記歩行ロボット装置の自己位置を算出する。
(もっと読む)
干渉回避制御装置
【課題】干渉チェックの見落としによる機器同士の干渉発生をより確実に防ぐことのできる干渉回避制御装置を得ること。
【解決手段】干渉回避制御装置は、補間制御周期での停止予定位置に基づく干渉チェックに見落としが生じうるか否かを判定する第1判定手段11と、干渉チェックに見落としが生じうると判定された見落とし区間において、1補間制御周期を整数で割った周期で停止指令を出した場合の停止予定位置を算出する第1計算手段1と、停止予定位置に基づいて動作機器と他の機器との機器間距離を算出する第2計算手段2と、3点以上の機器間距離に基づいて近似曲線を算出する第3計算手段3と、近似曲線に基づいて見落とし区間における機器間距離の最小値を算出する第1最小値算出手段4と、動作機器と他の機器とが近接した場合の近接距離と最小値とを比較して干渉の有無を判定する第2判定手段5と、を備える。
(もっと読む)
歩行者の軌跡を予測して自己の回避行動を決定するロボット
【課題】周囲の通行への影響を抑制しながら歩行者と安全にすれ違う。
【解決手段】自律的に行動するロボットRは、自己とすれ違う歩行者Thの軌跡を示す歩行者モデルを記憶しており、自己および歩行者Thの位置を検出して、検出結果および歩行者モデルに基づいて自己とすれ違う歩行者Thの軌跡を予測し、予測結果に応じて自己の回避行動を決定する。
(もっと読む)
走行車
【課題】少ない計算量で走行車の位置及び姿勢を把握する。
【解決手段】走行車1は、周辺物がある走行経路5を自動走行するものであって、走行車本体1aと、測距センサ33と、記憶部45と、局所地図作成部41と、局所地図照合部47とを備えている。測距センサ33は、走行車本体1aに設けられ、周辺物までの距離を複数回測定する。記憶部45は、走行経路5にある周辺物が記録された地図データ51を記憶する。局所地図作成部41は、測距センサ33の1回の走査で得られる複数の位置データの集合に基づいて、近似線を算出する。局所地図照合部47は、近似線と地図データ51を照合することで、走行車本体1aの位置及び姿勢を算出する。
(もっと読む)
1 - 20 / 440
[ Back to top ]