
Fターム[5H301FF05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の位置認識用固定設備 (875) | 移動経路に沿って配置されるもの (205) | 光を利用するもの (61)
Fターム[5H301FF05]の下位に属するFターム
光を反射するもの (30)
Fターム[5H301FF05]に分類される特許
1 - 20 / 31
無人搬送システム
【課題】停止マークの汚れや欠けに強い無人搬送システムを提供する。
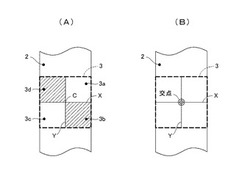
【解決手段】本発明に係る無人搬送システムは、路面に敷設された誘導ライン2と、誘導ライン2上に設けられた停止マーク3と、誘導ライン2に沿って走行するとともに、停止マーク3を目印にして停止する無人搬送車とを備えたシステムである。停止マーク3は、誘導ライン2とは異なった色で着色された部分(3b、3d)を有し、色の違いにより交差する2本の線X、Yを認識させ得るようになっている。また、無人搬送車は、該2本の線X、Yの交点を目印にして停止するよう構成されている。
(もっと読む)
有軌道台車システム

【課題】有軌道台車システムにおいて、軌道に配置されたマークを確実に検出する。
【解決手段】有軌道台車システムは、天井又は天井近傍に敷設された軌道100と、軌道に沿って走行する台車とを備える。台車は、軌道の走行面部上を走行する走行部210と、走行部から軌道の間隙を利用して懸垂される台車本体部220と、走行部及び台車本体部のうち一方に設けられる検出手段610と、走行部及び台車本体部のうち他方に設けられ、検出手段から照射された光を検出手段へと反射させる反射手段620とを有している。軌道は、所定位置における走行面部から、検出手段及び反射手段間の光路を遮るように間隙側に突出するマーク部630を有している。
(もっと読む)
搬送車
【課題】左右の車輪を独立して駆動可能な搬送車において、簡単な構成及び制御による位置決めフィードバックを可能にする。
【解決手段】搬送車3において、第1走行車輪25及び第2走行車輪28は、搬送車本体15の左右に設けられている。第1モータ26及び第2モータ29は、第1走行車輪25及び第2走行車輪28にそれぞれ接続され、さらに、第1モータ制御部63及び第2モータ制御部64にそれぞれ接続されている。速度パターン発生部62は、第1モータ制御部63が第1モータ26を位置決め制御するときに、第1モータ制御部63が生成した速度指令を受信し、次に当該速度指令を第2モータ制御部64に送信する。第2モータ制御部64は、第1モータ制御部63が生成した速度指令を第2モータ29に与える。
(もっと読む)
搬送車システム
【課題】搬送車の自動走行を継続させつつ、作業用エリアへの搬送車の侵入を防止することが可能な搬送車システムにおいて、作業用エリアでの安全性を向上させる。
【解決手段】搬送車システム1について説明する。搬送車3は、軌道2に沿って走行する。第2光電センサ48は、搬送車3に設けられている。通行禁止ゲート71は、軌道2に設置可能であり、第2光電センサ48によって検出可能なミラー87を有する。第1リミットスイッチ95は、軌道2に設けられ、通行禁止ゲート71が軌道2に設置されたことを検出する。コントローラ本体54は、第2光電センサ48からの検出結果によって通行禁止ゲート71が設置されたことを把握すれば、通行禁止ゲート71の片側を自動走行許可エリアに設定することを有効にする。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
車両移動システム及びランドマーク
【課題】自律走行する車両の実際の走行位置と予め設定された走行経路の間のずれを検知する車両移動システムと、その車両移動システムに用いられるランドマークを提供する。
【解決手段】撮像装置11を備えた車両12と、撮像装置11で撮像可能で少なくとも3つが、車両12の走行面13と非平行な平面上にあって、かつ同一直線上にない発光体14〜20と、撮像装置11によって撮像される画像中の発光体14〜20の位置から、走行面13上の特定の基準位置に対する車両12の位置ずれを検出する位置ずれ算出装置21とを有している。
(もっと読む)
物品搬送装置
【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
簡易無人搬送システム
【課題】安価で簡便に走行ラインが決定でき、同時にコマンド制御も安価で簡便にできる簡易無人搬送システムの提供。
【解決手段】 走行台車2が走行するラインを特定可能に、所定色によって帯状に設ける走行ライン3と、走行台車2に設置され、走行ライン3と対向し且つ走行方向と交差方向に複数のカラーセンサ24a〜24cを並設されて走行ライン3の色を検知可能な走行カラーセンサ24と、
走行台車2に設置され、カラーセンサ24a〜24cと電気的に接続されてカラーセンサ24a〜24cが常に走行ライン3上に位置するように走行台車2の走行を制御可能な制御部22と、
走行台車2の側部に設置されるコマンドカラーセンサ25と、
走行ライン3に沿って走行している走行台車2のコマンドカラーセンサ25と対向する走行面位置に所定色を施してなるコマンドライン4とからなる。
(もっと読む)
コークス炉の移動機の位置検出装置及び位置検出方法
【課題】コークス炉の移動機の現在位置を正確且つ安価に検出できる位置検出装置及び位置検出方法を提供する。
【解決手段】位置検出装置は、レール31〜35に接し移動機21〜25の移動に伴って回転するローラ42の絶対的な回転角度を測定するアブソリュート回転角度検出装置41を備え、移動機21〜25の現在位置を示す位置情報を出力する位置情報出力手段と、位置情報出力手段により出力された移動機21〜25の位置情報の誤差を修正する誤差修正手段と、を備える。誤差修正手段は、コークス炉10に設置された基準標識51と、移動機21〜25に搭載され基準標識51を検出する非接触式センサ52と、非接触式センサ52により基準標識51を検出した場合には、その時点において位置情報出力手段から出力された移動機21〜25の位置情報を、基準標識51に予め付与された基準位置情報に置換する位置情報置換手段と、を備える。
(もっと読む)
無人走行システム
【課題】簡易な構成で、低コストで、かつメンテナンスが容易な無人走行システムを提供すること。
【解決手段】無人走行車1と複数のターゲット2とカメラ3と画像認識処理装置とを備えた無人走行システム。第1のターゲットがカメラの視野に入った状態で無人走行車の走行を開始する。第nのターゲットがカメラの視野中の左右目標範囲に入るように、無人走行車が自身の向きを変えながら、第nのターゲットの視野中における大きさが所定の大きさとなるまで走行する。次いで、第nのターゲットの視野中における大きさが所定の大きさとなったときに視野中にある第n+1のターゲットが左右目標範囲に入るように、無人走行車が自身の向きを変えながら、第n+1のターゲットの視野中における大きさが所定の大きさとなるまで走行する。これにより、無人走行車が所望の軌道に沿って走行する。
(もっと読む)
搬送台車の舵取りシステム
【課題】簡易な搬送台車を対象とする有効適切な舵取りシステムを提供する。
【解決手段】任意方向に方向転換自在なキャスター2を有し、被搬送物を搭載して操作者3の後押し操作によって床面上を任意方向に移動可能とされた搬送台車(ストレッチャー1)を対象として、該搬送台車を予め定められた行先案内情報に基づいて所望の移動方向に案内するための舵取りシステムであって、搬送台車に行先案内情報を検出する検出器(センサ7)と、該検出器による検出結果に基づいて制御されて搬送台車を行先案内情報に沿って移動させる操舵輪6とを設ける。操舵輪を搬送台車の底部に格納自在に設ける。搬送台車の移動速度に応じて操舵輪を制御する。行先案内情報は床面に設けるライン8あるいは天井面に設ける画像マーカとする。補助駆動機構により後押し操作をパワーアシストするようにしても良い。
(もっと読む)
誘導システム及び誘導方法
【課題】移動体の誘導に要する設備負担を抑え、且つ、移動体を安定して誘導できる誘導システム及び誘導方法を提供することを目的とする。
【解決手段】搬送車両3Aの周囲環境に関する観測形状データを取得するレーザースキャナ13と、観測形状データと搬送車両3Aの位置姿勢情報とを対応付ける3次元マップを記憶するマップ記憶部15aと、レーザースキャナ13で取得された観測形状データを3次元マップに参照して搬送車両3Aの位置姿勢情報を割り出す演算部15bと、その位置姿勢情報に基づいて搬送車両3Aを絶対誘導する絶対誘導制御手段15cとを備える。この誘導システム1Aによれば、誘導のためのガイド設備を設置しなくても搬送車両3Aの誘導が可能であり、搬送車両3Aの誘導に要する設備負担を抑え、且つ、搬送車両3Aを安定して誘導できる。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
飼料移動のための無人走行車両
地面に置かれた飼料(3)を水平に移動させるための無人走行車輌(1)は、別々の駆動手段により別々に駆動される二つの車輪と、その車輌から壁部への距離を測定する距離測定手段(6)と、その壁部に対する車輌の中心線の向きを測定する向き測定手段(9)と、車輪間のトルク差を測定するトルク差測定手段(10)と、その車輌を走行方向に移動するよう制御する制御装置(11)と飼料(3)を水平に移動させる飼料移動手段と、を備え、前記制御装置(11)が、動作中に前記距離測定手段(6)により測定された壁部までの距離を、初期設定の最小距離以上に維持するようプログラムされ、さらに、飼料移動手段の最下点(19)の高さと又は位置を調整する調整装置を備えている。 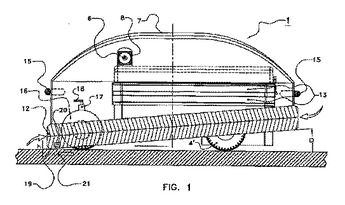 (もっと読む)
(もっと読む)
走行車両の停止制御装置及び停止制御方法
【課題】停止指示を誤検出することなく、素早くかつ的確に自動操舵状態にある走行車両の動作を停止させることができる停止制御装置及び停止制御方法を提供する。
【解決手段】ステアリング操作による手動操舵と、ステアリング操作とは無関係に自動的に進行方向が決定される自動操舵とが切り替え可能な、自動操舵中の走行車両の動作を停止させる停止制御方法であって、ステアリングの角度を参照するステップと、当該角度が変化した際にステアリングの角度変化量ΔθSTと角速度ωSTを求めるとともに、角度変化量ΔθSTと閾値ΔθEM、及び角速度ωSTと閾値ωEMを比較するステップ(S4、S5)と、角度変化量ΔθSTが閾値ΔθEMよりも大きく、さらに角速度ωSTが閾値ωEMよりも大きい場合に走行車両の動作を停止させるステップ(S7)と、を備える。
(もっと読む)
車両の位置を決定する方法および装置、コンピュータプログラムおよびコンピュータプログラム製品
【課題】本発明は、経路に沿って移動する車両の位置を決定するための装置および方法に関連する。
【解決手段】この経路に沿ってマーカ、特にコードキャリアまたはバーコードが配置されている。この方法は、車両に搭載されたデジタルカメラによってマーカが検出され、デジタルカメラの検出範囲またはカバー範囲内にある少なくとも一つのマーカ像の位置の画像処理から、一つの所定のマーカまたは複数の所定のマーカに対する、経路に沿った車両の主移動方向および主移動方向に対して直角をなす少なくとも一つの方向における車両の相対位置が決定されることを特徴とする。本発明はまた、コンピュータプログラムおよびコンピュータプログラム製品に関する。
(もっと読む)
自律移動型ロボットの特定位置誘導制御方法
【課題】本発明は、自律移動型ロボットが滑らかな動作で任意の場所に、任意の方向から任意の向きで進入することができる自律移動型ロボットの特定位置誘導制御方法を提供することを目的とする。
【解決手段】自律移動型ロボットの特定位置誘導制御方法であって、自律移動型ロボットを移動させる移動ステップと、自律移動型ロボットの周囲の状況を撮影する撮像ステップと、特定位置の上方に設けられたマーカを抽出するマーカ抽出ステップと、撮像ステップにて撮影された撮像画像をもとに前記特定位置の方向を算出する方向算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の間の距離を算出する距離算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の該ロボット進入する姿勢方向を算出する姿勢方向算出ステップと、を有しており、自律移動型ロボットを前記特定位置の特定の方向から進入させることを特徴とする。
(もっと読む)
搬送台車、停止位置判定方法およびプログラム
【課題】搬送システムが多数の装置を含んでいても、装置の設置位置変更を行なったときの搬送システムの立上げ、搬送システムの変更時に要する工数および時間を抑制できること
【解決手段】軌道を走行して停止し、被搬送物を支給する、または被搬送物を引き取るOHT搬送台車1において、基準画像記憶部は基準画像を記憶する。バーコード検出部33は、レール10に付されたバーコード25を検出する。走行距離測定部は、バーコード25からの走行距離を測定する。走行指示部は、走行距離が予め決められた距離となったときに、当該OHT搬送台車1を停止させる。CCDカメラ2は、OHT搬送台車1が停止したときに、レール10を含む画像を撮像する。停止位置判定部は、基準画像記憶部から読み出した基準画像とCCDカメラ2が撮像した画像とを比較し、これらの差異が基準値の範囲内であれば、目標停止位置に停止したと判定する。
(もっと読む)
無人搬送車の検品搬出方法
【課題】搬送中に搬送物の種類や数量を検品し、その結果に基づき搬送先を自由に変更して搬送システムをシンプルに維持し高い搬送効率を維持することができる無人搬送車の検品搬送方法を提供する。
【解決手段】検品ステーション11を通過する無人搬送車2の情報およびその通過時点を管制制御コンピュータ4aから検品用コンピュータ18に伝達し、この伝達信号を受けて、検品ステーション11を通過する当該無人搬送車2上の各搬送物に取り付けたタグ12のみを管制制御装置4で用いる無線通信方式とは異なる無線通信方式を用いて無線により非接触で検出し、検品用コンピュータ18が管制制御コンピュータ4aを介して当該無人搬送車2に検品結果を発信し、その検出データに基づいて搬送物の数量および種類に異常がないかどうかを判断し、異常がある場合には搬送経路を変更して保守ステーション23に荷置きする。
(もっと読む)
1 - 20 / 31
[ Back to top ]