
Fターム[5H301GG07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655) | 非接触式検出手段であるもの (1,408)
Fターム[5H301GG07]の下位に属するFターム
光学式検出手段であるもの (1,003)
超音波検出手段であるもの (262)
Fターム[5H301GG07]に分類される特許
61 - 80 / 143
無人搬送車を用いた搬送装置
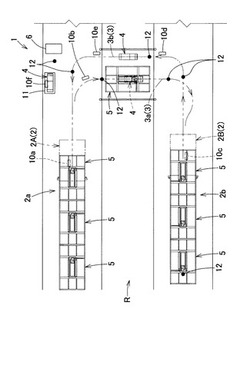
【課題】無人搬送車による通路の遮断時間を短縮することで、作業全般の流れを良くするとともに、搬送路の変更も行なうことができる無人搬送車を用いた搬送装置を提供する。
【解決手段】2つのステーション2A、2Bを接続し、通路Rとの交差部において往路3aと復路3bとを有する誘導ルート3と、これに沿って走行する複数の無人搬送車4と、2つのステーション2A、2Bの一方で無人搬送車4に連結され、他方で解除されることで2つのステーション2A、2B間を搬送されるパレット5と、無人搬送車4の走行を制御する地上制御機6と、往路3a及び復路3bにおける通路Rの進入口の無人搬送車4の有無を検知する進入口検知手段とを備え、無人搬送車4が進入口を通過する際、他方の進入口に無人搬送車4が無い場合には停止して他方の進入口に無人搬送車4が到着すると同時に発進する。
(もっと読む)
走行ロボット

【課題】監視巡回する走行ロボットにおいて、カーブを支障なく通り抜けるとともに、不審者でない小動物を不審者と誤認することがない走行ロボットを提供する。
【解決手段】巡回ルートのカーブにさしかかると、走行ロボットはカーブ入り口標識を検出し、レーダを起動させ進行方向の左右にレーダ波を送出する。このレーダ波の反射によって左右の通り抜け可否を判断し、進行方向を変える。また焦電センサで小動物らしき熱源を検出したら、走行ロボットは搭載しているレーダとカメラを起動しこの情報を無線で警務者に送出する。警務者は小動物であると判断したら走行ロボットにレーダの停止と警報をオフする命令を送出する。
(もっと読む)
走行機器、無線タグ装置及びそのプログラム
【課題】走行機器と連携する装置が非接触で誘導や回避などの動作を、少ない電力消費でも安定に動作する走行機器及び無線タグ装置を提供すること。
【解決手段】この本体周辺の無線タグの情報を読み取る無線タグ読取手段を備えた走行機器と、この本体と連携する無線タグ装置であって前記無線タグ読取手段と通信可能な無線タグと、前記無線タグのアンテナから受信した電力から制御する装置からなり、前記走行機器が前記無線タグ装置に接近したときに、無線タグのアンテナから受信した電力によって、前記無線タグ読取手段へ応答すると共に、無線タグに備えている装置を動作させることで、走行機器が無線タグ装置に接近したときのみ無線タグ装置に備え付けてある装置を動作させる。
(もっと読む)
無人搬送車の前後進モード切替制御装置及び前後進モード切替制御方法
【課題】前進モードのときと後進モードのときとで停止位置を一致させることができる無人搬送車の前後進モード切替制御装置及び前後進モード切替制御方法を提供する。
【解決手段】床面に敷設された軌道を検出する軌道検出センサをそれぞれ備える複数の駆動ユニットを有し、前進後進可能な無人搬送車の前後進モードの切替を制御する装置であって、複数の駆動ユニットにそれぞれ設けられたマーカ検出センサでコマンドマーカを検出したら、前後進モードの切替指令であるか否かを判定するモード切替判定手段(ステップS1)と、前後進モードの切替指令があったら、進行方向側の駆動ユニットのマーカ検出センサをアクティブ状態にし、反対側の駆動ユニットのマーカ検出センサを休止状態にするアクティブセンサ切替手段(ステップS2)と、を有する。
(もっと読む)
第1の農業機械と並行して田畑一面を走行するように操縦することができる第2の農業機械を操縦するための方法および装置
本発明は、第1の農業機械(10)に対して相対的に、田畑(34)一面で操縦することができる第2の農業機械(12)を操縦するための方法および装置に関し、
距離計(60)であって、農業機械(12)の1つの上に搭載され、水平領域にわたる隣接した対象物の方向および距離に関する測定値を記録するように動作することができる、距離計(60)と、
評価手段(68)であって、距離計(60)に接続され、操縦信号を出力するように設計され、その操縦信号は、距離計(60)の測定値に基づき、第1の機械(10)に対して相対的に第2の機械(12)を誘導する、評価手段(68)とを備える。
評価手段(68)は、距離計(60)によって時間的に連続して記録された、複数の測定値を参照して、記録された測定値から、距離計(60)を備えていない機械(10)に割り当てることができる測定値を選択し、そして選択された測定値を使用して、操縦信号を生成するように、動作することができることが提案されている。 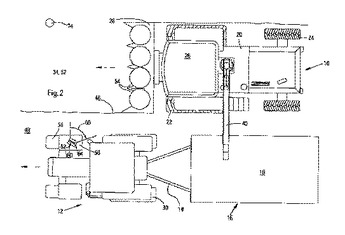 (もっと読む)
(もっと読む)
移動体、及び車両用警告装置
【課題】障害物との衝突を適切に回避すると共に、自己の移動によって周囲に戸惑いを感じさせないように配慮した移動体等を提供すること。
【解決手段】周辺に存在する移動障害物の位置及び向きを検知する検知手段(10、31、32)と、前記検知手段により検知された移動障害物の位置から見て当該移動障害物の向きに相当する部分が広くなるように進入不可領域を設定する進入不可領域設定手段(36)と、を備え、前記進入不可領域設定手段により設定された進入不可領域への進入を回避するように移動することを特徴とする移動体(1)。
(もっと読む)
ロボットおよびタスク実行システム
【課題】複数のロボットのそれぞれによりタスクが円滑に実行されうるように、他のロボットに搭載されている複数のアクティブセンサの相互干渉を回避することができるロボット等を提供する。
【解決手段】複数のロボットRのそれぞれに搭載されているアクティブセンサが相互に干渉する可能性があり、かつ、自己ロボットRにより実行されているタスクに対する当該アクティブセンサの寄与度が、他のロボットRにより実行されているタスクに対する当該アクティブセンサの寄与度よりも低い状況において、自己ロボットRの当該アクティブセンサの感度が下げられる。タスクへの寄与度が比較的低いアクティブセンサの感度が下げられることにより、アクティブセンサの相互干渉が回避され、かつ、ロボットRによる当該タスクに支障が生じる事態が回避されうる。
(もっと読む)
移動台車の制御装置、移動台車システムおよび自己位置同定方法
【課題】移動台車の起動時に人手に拠らず位置姿勢を精度良く自動で算出できる自己位置同定方法およびそれを使った移動台車システムを提供する。
【解決手段】本発明は、移動台車1の下部に設けた電子タグリーダアンテナ5−aで、移動台車1を回転動作中に、床面に敷設した電子タグ6を検出し、3つ以上の検出電子タグ7の絶対位置データと電子タグ検出時の移動台車1の位置姿勢データから移動台車1の位置と姿勢を求めるようにした。
(もっと読む)
車両
【課題】 誤検出することなく前方の車両や物体を検出できる衝突防止用のセンサを備えた車両を提供すること。
【解決手段】 ゴルフカート10に、追突防止センサと障害物センサ33a等を設けた。追突防止センサは、後方に電波aを発信する送信器31と、前方のゴルフカート10aとの距離が一定距離以内になったときにゴルフカート10aの送信器31から発信された電波aを受信する受信センサ32とからなる。障害物センサ33a等は、電波aの発信距離よりも長い距離に亘って前方に超音波bを発信し、物体に衝突して戻ってくる超音波bを受信することにより前方の物体を検出する。そして、受信センサ32が電波aを受信したときにゴルフカート10は停止し、受信センサ32が電波aを受信せず、障害物センサ33a等が物体を検出したときにゴルフカート10は低速走行するようにした。
(もっと読む)
搬送車両および搬送車両の自動走行制御方法
【課題】軌道修正を自動で行うことにより、作業員の労力の軽減ならびに軌道復旧完了までに要する時間を短縮する。
【解決手段】ガイドラインに沿って自動走行する搬送車両であって、車体の走行方向に沿って間隔をおいて配置されるとともに、ガイドラインに対する位置ズレ量を検出するための複数のセンサと、車体の走行方向に沿って設けられた第1車輪と、第1車輪に対して走行方向と平行に設けられた第2車輪と、センサの検出結果に基づきガイドラインに対する車体の位置ズレ量およびズレ角を推定し、推定した位置ズレ量およびズレ角に基づいて第1車輪および第2車輪の少なくとも一方を駆動制御する制御手段とを具備する搬送車両を提供する。
(もっと読む)
車両
【課題】信頼性が高くかつ利便性のよい車両を提供する。
【解決手段】車両10は、自動/手動の走行モードを設定するための切り替えボタン42aおよびリモコン100、走行モードに対応したマスク制御信号を出力するマイコン78、走行モードに対応したマスク制御信号を出力させるための指示をマイコン78に入力する指示制御ユニット64、障害物を検出しかつ検出信号を出力する前方障害物センサ58aおよび後方障害物センサ58b、ならびにマイコン78からのマスク制御信号および障害物センサ58a,58bからの検出信号に基づいて車両10の非常停止の要否を示す非常停止制御信号を生成する第1論理回路66を備える。第1論理回路66からの非常停止制御信号に基づいて車両10の非常停止動作が制御される。
(もっと読む)
倒立振子型移動体、及びその制御方法
【課題】安定して走行可能な倒立振子型移動体、及びその制御方法を提供する。
【解決手段】本発明にかかる倒立振子型移動体は、車輪を回転可能に支持する車台16と、駆動輪18、20と、車輪を回転駆動するモータ34、36と、ロッド26を介して車台16に対して回動可能に支持された車体12と、車輪の車軸に対する車体12の重心位置に応じて変化する変化量を測定するジャイロセンサ48と、車体12を駆動して、車軸の位置に対する車体12の重心位置を変化させる姿勢制御用アクチュエータ40と、車体12の変化量がしきい値を越えた場合に、車体12の傾斜角速度を低減させるに姿勢制御用アクチュエータ40を駆動する制御部80と、を備えるものである。
(もっと読む)
自走車
【課題】乗り上げ状態と脱輪状態を区別して検知することが出来、乗り上げ状態に陥ることのない障害物についてはこれを乗り越えることが出来る自走車を提供する。
【解決手段】本発明に係る自走車においては、動輪2が懸架機構5を介して車体1に支持されている。懸架機構5は、車体1に対して回動が可能に支持された第1フレーム51と、第1フレーム51に対して回動が可能に支持され動輪2が取り付けられた第2フレーム52と、動輪2を走行面に押し付ける方向に第1フレーム51を付勢するスプリングと、第1フレーム51及び第2フレーム52の回動限界位置を検知する第1センサー7及び第2センサー8とを具え、該両センサー7、8から得られる検知信号に基づいて動輪2の回転を制御する。
(もっと読む)
遠隔監視システム
【課題】 監視員が把握していない異常記録を容易に確認できる遠隔監視システムの提供。
【解決手段】監視センタは、移動ロボットに自動的に復旧処理を実行させる自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに受信した異常信号の情報と、その他の動作モードであるときに受信した異常信号の情報とを区別可能にセンタ記憶部に記憶する記憶制御手段と、モード設定手段にて動作モードが自動復旧モードからその他のモードへ設定されると、自動復旧モードであるときに記憶された異常信号の情報からなる異常履歴又は該異常履歴を表示するためのダイアログを表示部に表示する履歴表示手段とを有する。
(もっと読む)
自己位置同定装置を備えた移動体
【課題】対象とする環境が大規模であっても自己位置同定に必要なランドマーク情報の処理コストを軽減でき、なおかつ環境の変化に対しても柔軟に対応可能な移動体の自己位置同定装置を提供する。
【解決手段】局所地図と大域地図とを備え、ランドマーク候補およびランドマーク照合結果を局所地図に保存して次回のランドマーク照合に利用する構成とした。更に、照合にあたって対応するランドマークがないランドマーク候補を新たにランドマークとして登録する一方、既に登録されているランドマークであっても長期間にわたって観測されないものは削除するようにした。
(もっと読む)
無人搬送車体およびその制御方法
【課題】無人搬送車体を転回用の特別なスペースを要することなく無人搬送車体が走行出来るスペースで確実に旋回させる。
【解決手段】車体底部に車輪3、4等が設けられ、該車輪のうち左右の駆動輪11a、11bが回転制御可能とされ、搬送路の誘導帯を検知するセンサ14a、14b、14cが進行方向の前方側に少なくとも左右一対で設けられている。さらに該センサの一方が検知オフとなり、該検知オフが所定時間継続し、かつ、全てのセンサが検知オフとなったとき、前記誘導帯が進路変更部であると判定して、前記一方のセンサの反対方向の駆動輪を逆転させる指令をして車体を旋回させる制御部15を備える。無人搬送車体が走行出来るスペースで無人搬送車体を確実に旋回させることができる。この結果、無人搬送車体の利用範囲が広がり、該利用分野でのマテリアルハンドリングが向上する。
(もっと読む)
電磁誘導式自動走行車の停止制御方式
【課題】 停止エリア外では高速での走行が可能であり、停止エリア内では、停止位置の精度に優れた電磁誘導式自動走行車の停止制御方式を提供する。
【解決手段】 電磁誘導式自動走行車が停止エリアに入ったことが検出された場合には、駆動モータ4の回生制動と、ドラムブレーキ10a〜dとを用いて減速し、その後に停止信号が検出された場合には、あらかじめ設定されている走行距離を走行した後に、電磁クラッチブレーキ15を用いて停止をする。そして、あらかじめ設定されている走行距離と、実際の走行距離とを比較し、その差が設定範囲を超えているような場合には、前記電磁クラッチブレーキを解除し、前進又は後退の微調整走行をした後に、再び前記電磁クラッチブレーキを用いて停止をする。
(もっと読む)
磁気誘導走行車システム
【構成】 走行路に沿って磁気テープ4あるいは磁気スポット6を設け、磁気誘導走行車2の磁気センサ8でこれらのマークの双方を検出し走行する。磁気テープ4に対してはマークから外れないように、磁気スポット6に対してはマーク間の位置をエンコーダ16で推定してマークを検出する毎に現在位置を確認して走行する。
【効果】 グレーティングなどの床には磁気スポットを、通常の床には磁気テープを設置し、何れの床でも走行できる。
(もっと読む)
無人搬送車の交差点分岐制御方法およびその装置
【課題】低コストで進行方向を制御する無人搬送車の交差点分岐制御方法を提供する。
【解決手段】本発明は、交差点通過時にカウントするカウンタと、搬送時の進行方向を制御する制御手段8bからなるコントローラ8を備えた無人搬送車において、制御手段は、カウント数毎に対応する交差点と、この各交差点での進行方向を記憶し、交差点通過中に前記カウンタがカウントしたカウント数に対応する、無人搬送車が次に通過する交差点の進行方向を読み込み(S8)、現在通過中の交差点を通過後に、読み込んだ次に通過する交差点の進行方向に応じて、無人搬送車の進行方向を案内する軌道に沿って走行するように無人搬送車の進行方向を制御する(S13)無人搬送車の交差点分岐制御方法である。
(もっと読む)
天井走行車
【構成】 カセット20をラテラルドライブ8で左右動させながら、カセット20の背面下部に設けたID23を、天井走行車4の走行中にIDリーダ26で読み取る。
【効果】 余分の時間を必要とせずに、IDを確実に読み取れる。
(もっと読む)
61 - 80 / 143
[ Back to top ]