
Fターム[5H301GG09]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655) | 非接触式検出手段であるもの (1,408) | 光学式検出手段であるもの (1,003) | 撮像手段であるもの (462)
Fターム[5H301GG09]に分類される特許
101 - 120 / 462
ランドマーク識別のための自動標識付け
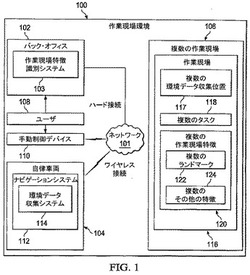
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
対象者検出システム、対象者検出方法、対象者検出装置および移動式情報取得装置

【課題】対象者が固定カメラの検出範囲内に所在する場合のみならず、対象者が固定カメラの非検出範囲に所在する場合を含めて対象者の所在や行動を検出すること。
【解決手段】管理装置は、固定カメラAを用いて対象者のアピアランス情報を検出し、検出したアピアランス情報に基づいて対象者の絞り込みを行う。また、管理装置は、固定カメラAおよび固定カメラBによるアピアランス情報の検出結果を用いて対象者の異常を検知する。そして、管理装置は、対象者の異常を検知すると、固定カメラAおよび固定カメラBの非検出範囲へ移動ロボットを移動させ、移動ロボットを用いて検出した顔情報に基づいて対象者を特定する。
(もっと読む)
移動体制御システム、制御装置、制御方法、及びプログラム
【課題】自機又は周囲の状況を検出するための複数の検出手段を有する移動体を、設定された経路に沿って自律的に移動させるべく制御する。
【解決手段】移動体を監視する監視者によって利用される遠隔監視端末130と、遠隔監視端末130と電波を介して通信接続され、一の移動体に搭載されて当該移動体を制御する車載コントローラ110aとを備え、車載コントローラ110aは、移動体が自律的な移動を継続することができるか否かを判定する移動継続可否判定部114aと、遠隔監視端末130と通信することができるか否かを判定する監視装置間通信判定部115aと、遠隔監視端末130と通信することができた位置を特定する通信可能位置特定部116aと、当該位置へ移動体を自律的に移動させるべく制御する移動体制御部125aとを有する。
(もっと読む)
自律走行ロボットを利用した地図生成方法、これを利用した最適走行経路算出方法およびこれらを遂行するロボット制御装置
【課題】本発明は自律走行ロボットを利用した空間地図生成方法を提供する。
【解決手段】本発明に係る地図生成方法は、空間に配置された複数の位置座標系の各々から出力されたロボットローカル座標からロボットグローバル座標を計算するステップ、および計算されたロボットグローバル座標に基づいて空間における複数の位置座標系各々の位置を推定し、推定された複数の位置座標系各々の位置に基づいて空間地図を生成するステップを含む。
(もっと読む)
接近困難な内部スペースを独立的に検査するための車両
【課題】僅かな所要スペースと良好な操縦可能性を特徴とし、多種の検査形式に適しており、問題なく内壁に沿って任意の空間的方向に動くことができるような、接近困難な内部スペースを独立的に検査するための装置を提供する。
【解決手段】強磁性の内壁24によって制限された接近困難な内部スペース、特に例えば蒸気タービンの蒸気室のような大きなキャスティング部分をセンサ23で検査するための車両10であって、共通の軸14を中心として回転可能な、軸方向で互いに間隔を置いて配置された、互いに独立的に駆動可能な少なくとも2つの車輪12,13を有している形式のものに関し、車両10が永久磁石等の付着手段21,22;25,26を有しており、該付着手段が、車両10を重力に抗して、車輪12,13で各内壁24に保持することにより、全内部スペースを検査することができる。
(もっと読む)
自律移動装置
【課題】状況に応じてタスクの実行に適した行動をとることが可能な自律移動装置を提供する。
【解決手段】自律移動装置1は、目的地まで自律的に移動する際に所定のタスクを実行する自律移動装置であり、環境地図311を記憶する記憶部31と、周囲の障害物情報を取得するレーザレンジファインダ20と、周囲の障害物情報から未知の障害物情報を特定する未知情報特定部32と、未知の障害物情報が特定された場合に、該未知の障害物に関連した動き情報、相対位置情報、属性情報からなる複数の判断情報を取得する判断情報取得部33と、判断情報に基づいて、タスクの実行をキャンセル又は続行する旨の行動シナリオ以外の行動シナリオであってタスクを実行するために定義された行動シナリオを含む、複数の行動シナリオの中から一つの行動シナリオを選択するシナリオ選択部34とを備える。
(もっと読む)
自律移動ロボット
【課題】人の移動したい方向が不明な場合でも、自律移動ロボットの適切な移動を実現する。
【解決手段】動作決定部80及び走行制御部66は、音声認識部56の認識結果に基づいて人が自律移動ロボットを退かそうとしているか否かを判定するとともに、人物検出部60と顔検出部52の検出結果に基づいて人が移動したい方向を判定する。この判定の結果、人に自律移動ロボットを退かそうとする意志があるが移動したい方向が不明と判定された場合には、自律移動ロボットを、人から離れる方向に移動させ、自律移動ロボットが人から離れる方向に移動した後に人が動いた方向に基づいて、自律移動ロボットを人から離れる方向に移動する。
(もっと読む)
自律移動体とその制御方法
【課題】 障害物を円滑に回避する自律移動体を提供する。
【解決手段】 移動体に水平面内での並進と鉛直軸回りの回転とが自在な移動機構を設け、障害物センサにより方位角毎に障害物までの距離を求める。長軸方向の両端に弧を備え、弧と弧の間を前記長軸方向に沿った線分で接続し、さらに自律移動体を内部に包含するモデルを用い、障害物にモデルが干渉しないように、並進と回転とを組み合わせて移動機構を駆動する。
(もっと読む)
自律走行装置
【課題】鉱山における土砂運搬用トラックなどの車両の自律走行技術が求められている。安全かつ高効率の土砂運搬作業実現のため、鉱山で高速走行する車両同士が安全に擦れ違えるように車両の走行を制御する必要がある。
【解決手段】通常は単独走行用の道路を車両が走行し、対面車両が来た場合は擦れ違い用の道路に走行路を切り替えるために、各車両が走行時に自車付近の路面状態を測定して得た路面情報を、運行管理を行っている運行管理センタに送信してセンタ側で集約し、地点ごとの路面状態がセンタから取得できるようにする。そして、擦れ違う自律走行トラック同士が擦れ違い用の道路に切り替える際には、センタからの路面情報を元に路面状態が悪化している地点を避けて走行レーンを切り替える。
(もっと読む)
自律移動体、速度設定装置および速度設定プログラム
【課題】
自律移動体の走行速度をスムーズに変化させることができる自律移動体、速度設定装置および速度設定プログラムを提供することを目的とする。
【解決手段】
自律移動体100は、移動環境内の所定範囲を計測する視覚センサ2と、視覚センサによる計測結果から所定範囲内の実際に計測された通路面積を算出する第1の通路面積算出部3と、移動体100の自己位置を推定する自己位置推定部4と、所定範囲に存在する固定された障害物の位置を示す参照マップと自己位置とから算出された通路面積を算出する第2の通路面積算出部5と、第1の通路面積算出部3と第2の通路面積算出部5とから算出された各通路面積の面積比を算出する面積比算出部6と、面積比から移動体100の速度を設定する速度設定部8と、を備える自律移動体である。これにより、急な速度変化を防止し、スムーズな減速が可能である。
(もっと読む)
経路探索システム、経路探索方法、経路探索プログラム、及び移動体
【課題】人間の通行が妨げられるのを防ぐことができる経路探索システム、経路探索方法、経路探索プログラム、及び移動体を提供すること。
【解決手段】本発明にかかる経路探索システムは、移動領域内に存在する移動始点より移動を開始し、移動領域内に存在する移動終点に到達する移動体の移動経路を探索するロボットであって、移動領域の情報に基づいて、基準経路を探索する最適経路探索部112と、基準経路の進行方向に基づいて、シフト方向を決定するシフト方向決定部113と、基準経路をシフト方向にシフトして、移動経路を決定する移動経路決定部115と、を備えるものである。
(もっと読む)
自律移動ロボット、これを用いた自律移動ロボットシステム及び自律移動ロボットの移動方法
【課題】自重の増加を回避するとともに機動性を確保し、かつ、センサ類の搭載性の低下を招来することなく移動中における安全性を確保できるようにする。
【解決手段】本発明は、移動領域内の測距データを取得するための測距部33と、移動領域内を移動するための駆動機構とを有し、生成した移動経路に沿って自律的に移動するものであり、移動経路に沿い、被索敵体から自己を遮視可能な遮視位置の候補を抽出する遮視位置候補抽出手段34bと、索敵部35によって取得した被索敵体の索出データに基づいて、被索敵体を索出する領域区分手段34aと、抽出した遮視位置の候補から、被索敵体から遮視可能な遮視位置を選定する遮視位置選定手段34cと、選定した遮視位置に向かう移動経路を生成する移動経路生成手段41bと、駆動機構54を介し、選定した遮視位置に向けて生成した移動経路に沿って移動させる移動手段51aとを有している。
(もっと読む)
移動ロボットの位置認識のための地図生成および更新方法
本発明は、移動ロボットの位置認識のための地図生成および更新方法に関し、より詳しくは、地図生成時には抽出されたランドマークと推定されたランドマークの確率誤差に基づいて抽出されたランドマークを登録し、地図更新時には既に登録されたランドマークの正確度を算出し、正確度が低いランドマークのレベルを調整したり誤登録されたランドマークを除去したりして位置認識の誤差を最小化することができる、移動ロボットの位置認識のための地図生成および更新方法に関する。  (もっと読む)
(もっと読む)
自動走行ルートガイドツールおよび自動走行装置
【課題】簡単に設置が可能で、かつ、安価な走行ガイドツールと、該ガイドツールを基に方向転換しながら予め決められたルートを自動走行可能な自動走行装置を提供する。
【解決手段】識別情報が記憶されたRFIDチップを内蔵した走行ルートガイドツールであって、前記走行ガイドツールの視認可能な面に走行をガイドすべき自動走行装置が方向転換する時に基準となる位置と方向を示す印が表示されているように構成した。自動走行装置は、RFIDリーダと、カメラと、カメラ画像分析部と、識別情報に対応づけられた方向情報と、画像分析の結果得られた方向情報を基に転換方向を確定する制御部と、方向転換操舵機構とを有するように構成した。
(もっと読む)
自律移動装置
【課題】自律移動装置に対して任意の通行可否領域設定を容易に高精度に行う。
【解決手段】運用現場で取得した画像と自己位置認識手段2で認識した位置情報とを対応付けて画像情報記憶手段9が記憶し、画像情報記憶手段9が記憶する画像情報から通行可否領域の設定に有用な画像を画像抽出加工手段10が抽出加工して表示入力手段が表示し、その画像に対して使用者が地図情報編集手段12を用いて通行可否領域の設定を可能とする。
(もっと読む)
自律移動システム及び自律移動装置
【課題】自律移動装置が指定された経路から逸れることが無い移動計画を行うことができる自律移動システム及び自律移動装置を提供する。
【解決手段】管理装置は、通信装置37を介して各自律移動装置2a、2bから受信する集約データに基づいて、地図上の位置座標と、自律移動装置2a、2bで推定される自己位置が不確かになる程度を判断する誤差分布データとを対応付けて登録する誤差登録地図を管理する地図管理部310と、この地図管理部310で管理される誤差登録地図310cに基づいて、各自律移動装置2a、2bが経路から逸れることが無い又は逸れる確率を低くする、動作及び/又は経路を指定する移動計画を行う運用管理部320を備える。
(もっと読む)
自律移動装置
【課題】自律移動装置において、一定数以上の移動物体が存在する領域の通過を安定かつ高速に可能とする。
【解決手段】自律移動装置1は外界センサ部2、移動物体検出手段40、自己位置推定手段41、追従対象選択手段42、経路生成手段43、駆動部3を備える。追従対象選択手段42は、移動物体の物体位置座標108、速度ベクトル109に基づいて本装置1の目標方向と一番近い移動物体を追従対象として選択し、経路生成手段43が追従対象の背後までの走行経路を生成する。追従対象選択手段42は対象物体を追従中にも他の移動物体の物体位置座標108、速度ベクトル109を取得して追従対象を変更したほうが良いと判断した場合、追従対象を変更し、経路生成手段43が変更後の対象物体までの走行経路を生成する。
(もっと読む)
半自律型無人車両の遠隔操縦システム
【課題】簡単な操作によって高速走行を行うことができるとともに、走行の可否判別できない領域と識別されたときにも必要に応じて進入走行することができるようにする。
【解決手段】半自律型無人車両Bにおいては、走行可否識別不能領域a2への進入の許可情報を受信したときには、走行可能領域a1及び進入が許可された走行可否識別不能領域a2内における走行経路を生成して走行するとともに、走行可否識別不能領域a2を含む走行領域の画像を遠隔操縦装置に向けて送信する。一方、遠隔操縦装置では、走行可否識別不能領域a2を含む走行領域の画像を表示部に表示するとともに、走行可否識別不能領域a2への進入が許可されたか否かを判定し、走行可否識別不能領域a2への進入を許可されたと判定したときには、走行可否識別不能領域a2への進入の許可情報を半自律型無人車両に向けて送出する。
(もっと読む)
センサフュージョンによる地図の自動生成、およびそのように自動生成された地図を用いて移動体の移動をするための、装置、方法、ならびにプログラム
【課題】精度の高い環境地図を作成しつつ、同期的に移動体のその環境内での移動に反映する。
【解決手段】環境を表す地図を用いて状態推定をして移動する移動体を制御する装置であり、地図を格納する記憶手段と、移動体の状態推定データの初期値を設定し更新する状態推定データ格納・処理手段と、測定点を環境内に設定し状態推定データから得た移動体の位置と測定点との位置関係を測定した測距データを得る測距手段と、環境の一部を画像データとして得る画像取込手段と、測距データと画像データを対応づけた合成データの残差を計算する残差算出手段と、移動体の移動量を出力する移動手段とを含み、状態推定データ格納・処理手段が移動手段の出力と残差とで状態推定データを更新し、測距手段が測距データで地図を更新し、移動手段が更新された状態推定データと地図とで移動体の移動を調節する装置。
(もっと読む)
半自律型車両の遠隔操縦システム
【課題】所期の走行経路から外れて走行したときにも、所期の走行経路に容易に復帰できるようにする。
【解決手段】本発明は、測距部11,12、撮像部13及び走行機構Dを有し、自律走行と遠隔操縦可能な半自律型車両と、測距部11によって取得した画像を表示する表示部、及びその表示部に表示された画像に基づき半自律型車両の操縦コマンドを送出する遠隔操縦装置とを有する半自律型車両の遠隔操縦システムであって、操縦コマンドの受信が中断したか否かを判定するコマンド受信中断判定手段10aと、当該中断判定したときの受信中断位置情報を取得する中断位置情報取得手段10bと、自律走行を行わせる自律走行手段10cと、操縦コマンドの受信が再開したか否かを判定するコマンド受信再開判定手段10dと、受信再開位置情報を取得する再開位置情報取得手段10eと、復帰走行させる復帰手段10gとを半自律型車両に設けている。
(もっと読む)
101 - 120 / 462
[ Back to top ]