
Fターム[5H301GG09]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655) | 非接触式検出手段であるもの (1,408) | 光学式検出手段であるもの (1,003) | 撮像手段であるもの (462)
Fターム[5H301GG09]に分類される特許
41 - 60 / 462
飛行体の飛行制御システム
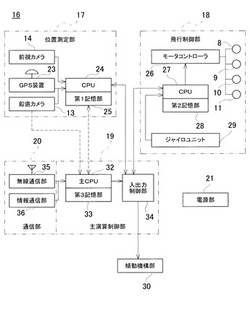
【課題】簡便に而も高精度に飛行体の高さ位置の測定を可能とし、無人飛行時の飛行体の飛行高度を適正に制御可能とした飛行制御システムを提供する。
【解決手段】飛行体と、該飛行体に設けられた航行手段8,9,10,11と、位置測定部17と、前記航行手段を制御する飛行制御部18と、前記位置測定部と前記飛行制御部とを制御する主演算制御部19とを具備し、前記位置測定部は飛行体の地上座標を測定するGPS装置23と、飛行体下方のデジタル画像を撮像する鉛直カメラ13とを有し、該鉛直カメラにより撮像した2地点の画像と、前記GPS装置により測定した2地点の地上座標と、前記鉛直カメラの焦点距離に基づき前記飛行体の高度を測定し、前記主演算制御部は測定された高度に基づき前記飛行制御部を介して前記航行手段を制御し、前記飛行体を所定の高度で飛行させる。
(もっと読む)
移動体遠隔操縦システムおよびそのための制御プログラム

【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
個人の相互交流のためのコンパニオンロボット
【課題】ロボットを人間と相互交流できるようにする。
【解決手段】人間の居住者と相互交流するための来客としての移動ロボット10は、居住者との相互交流に先立ち、部屋を縦横に捜索手順を実行し、目的の居住者が在宅しているか口頭で尋ねることがある。居住者を発見した時点で、移動ロボットは、遠隔地第三者とのテレビ会議セッションを実施する、または種々の方法で居住者と相互交流することができる。例えば、ロボットは、居住者と会話をし、薬剤または他のスケジュールの遵守を促進する。さらに、ロボットは、居住者との衝突を回避するための安全機能を組み込み、またロボットは、危険な障害にならないように、その存在を聞こえるように知らせる、および/または目に見えるように示すことができる。さらに、あらゆるセンサの記録および転送が居住者に承認されるように、移動ロボットは、組み込まれたプライバシーポリシーに従い行動する。
(もっと読む)
移動体
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
移動装置およびロボットならびにこれらの制御システム
【課題】制御対象の状況に鑑みて、時空間座標系における当該制御対象の目標軌道を適当な形態で探索することができるシステム等を提供する。
【解決手段】時空間座標系における第1基準点q1(k)および第2基準点q2(k)の初期位置関係(k=1)が、アクチュエータ2の動作性能に応じた「第1条件」を満足するように設定される。前回軌道候補tr(k−1)が物体軌道troに接触すると判定された場合、時空間座標系における第1基準点q1(k)および第2基準点q2(k)の今回位置関係(k>1)が第1基準点q1(k)および第2基準点q2(k)の今回時間間隔が前回時間間隔よりも長くなる等の「第2条件」を満足するように設定される。
(もっと読む)
環境地図生成方法
【課題】自己位置推定誤差が生じる場合であっても、移動体と障害物との接触を回避可能な環境地図生成方法を提供すること。
【解決手段】本発明にかかる環境地図生成方法は、環境地図を格納するメモリ12と、周囲の環境情報を取得するセンサ11と、を備え、環境地図に基づいて自律移動する移動体1の環境地図生成方法である。まず、実環境に基づいて環境地図を生成する。次に、環境地図における狭路部の地図情報を削除する。そして、移動体1が狭路部を自律移動する場合、センサ11により取得した当該狭路部の環境情報に基づいて、環境地図における当該狭路部の地図情報を生成する。
(もっと読む)
位置推定方法、位置推定装置及びプログラム
【課題】位置推定方法、位置推定装置及びプログラムにおいて、環境変化に関する事前の予測、或いは、事前の知識に依存せずに自己位置推定の精度を向上することを目的とする。
【解決手段】コンピュータによる位置推定方法において、電子装置の移動履歴を取得して記憶部に一時的に格納する移動履歴取得工程と、前記移動履歴と、外的センサの観測情報と、電子装置が導入される環境の静的地図のデータと、電子装置の移動中に実時間で作成された非静的地図のデータに基づいて、電子装置の自己位置とその周囲の周辺地図を推定する推定工程を含むように構成する。
(もっと読む)
自律移動サービス提供システム
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
モバイル機器のナビゲーション
【課題】ビーコンを用いて自己位置を決定する視覚ベースの自律ナビゲーションシステムにおいて、高精度かつ安価な位置決定方法を提供する。
【解決手段】モバイル機器(ロボット)680は撮像手段で取得した画像から少なくとも1つのビーコンA、B、C、D、E、F、G、H、I、J、K、Lの画像に対する空間情報を決定し、この空間情報に基づいて、モバイル機器の位置を判断する。空間情報を決定するステップは、少なくとも1つのビーコンの各ビーコンを特定する符号化された視覚情報に基づく。画像は、モバイル機器の周囲の環境の少なくとも一部の少なくとも1つのビーコンの画像を含む。モバイル機器にあらかじめ記憶された位置情報と特定されたビーコンの画像からモバイル機器の位置決定が可能となる。
(もっと読む)
移動体
【課題】少ない画像記憶量で、走行中の自己の位置を認識することができ、教示された走行経路に沿って安定して走行することが可能な移動体を提供する。
【解決手段】外環境を撮像する撮像装置15と、複数の教示位置にて撮像装置が撮像した画像をそれぞれ記憶画像として記憶する記憶装置16と、撮像装置15が撮像する現在の画像から第1の特徴点群の位置を抽出し、記憶画像のそれぞれから第2の特徴点群を抽出し、現在の画像に最も近似する記憶画像を近似画像として選択し、現在位置よりも前方の教示位置にて撮像された記憶画像を目標記憶画像として設定し、第1の特徴点群に対して平行移動処理及び拡大縮小処理を行い、第1の特徴点群の位置を目標記憶画像の第2の特徴点群の位置に予め決められた誤差範囲で一致させ、その際の横方向の平行移動量及び拡大縮小率αを求める画像処理装置と、換算結果から走行を制御する制御装置とを有する。
(もっと読む)
地図生成装置、地図生成方法、移動体の移動方法、及びロボット装置
【課題】たくさんの人が存在する混雑な環境下で地図構築を行う。
【解決手段】ロボットが移動する間に連続して撮影した連続画像を取得する連続画像取得部11と、連続画像から各特徴点における局所特徴量を抽出する局所特徴量抽出部12と、局所特徴量抽出部12により抽出した局所特徴量について、連続する入力画像間でマッチングをとる特徴量マッチング13と、特徴量マッチング部13により所定数連続する画像間でマッチングが取れた局所特徴量の平均を不変特徴量として求める不変特徴量算出部14と、連続画像を取得した各時刻におけるロボットの位置に基づき各不変特徴量に対応する距離情報を算出する距離情報取得部15と、当該不変特徴量及び距離情報を有するハイブリッド地図として、局所メトリカル地図を生成する地図生成部16とを有する。
(もっと読む)
自走式装置
【課題】非接触作動および/または接触作動する、物体を検出するためのセンサ機構を備えた自走式装置で、吸込/掃除ロボットのような床を清掃しつつ異常事態にアラームを発生する。
【解決手段】好ましくは装置の個々の機能の相乗効果を利用して当該タイプの装置をさらに改良するために、物体の検出が、場合により、前記物体の運動または形状に関する、前記物体に関して記憶されているデータとの比較において偏差を有する(通常でない)と評価された前記物体の検出が、例えば音響アラームのためのトリガ(発生要因)として利用可能であり、またはこれに関する検査のために伝送可能であることが提案される。
(もっと読む)
車両制御装置
【課題】自車の走行時の状態に応じて、より適切な走行モードに切替えることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する通信追従走行制御と、先行車100と自車1との間の位置関係情報をレーダー12で取得し、取得した位置関係情報に基づいて自車1の走行状態を制御する自律追従走行制御と、を切替えて追従走行が可能な走行制御ECU20を備え、通信追従走行制御中に通信追従走行制御を行うことが困難になった場合には自律追従走行制御に切替え、且つ、切替え後の自車1と先行車100との車間距離または車間時間を通信追従走行制御中における車間距離または車間時間よりも大きくする。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
自律移動体
【課題】移動可能な障害物が安全に通過できるように、停留領域を予め定めることなく、自ら設定した待避方向に移動することが可能な自律移動体を提供する。
【解決手段】自律移動体1は、自機の大きさD2を記憶する記憶部22と、障害物情報を取得するレーザレンジセンサ12と、取得された障害物情報に基づき、干渉障害物66が存在する領域の両端部の位置であって、通路面と平行な面において自機の移動目標方向72と略直交する方向の両端部の位置を示すエッジ点86を特定する障害物特定部233と、自機の大きさD2、及び、エッジ点86に基づいて、待避方向を設定する方向設定部237と、待避方向へ自機が向かうように制御する移動制御部25とを備える。
(もっと読む)
自律移動体
【課題】干渉する可能性のある障害物が存在する場合に、停止行動又は退避行動を状況に応じて適切に行うことが可能な自律移動体を提供することを目的とする。
【解決手段】自律移動体1は、レーザレンジセンサ12と電子制御装置20とを備える。電子制御装置20は、自機の大きさD2を記憶する記憶部22と、自機が移動可能な領域である通路95の幅方向の大きさを示す空間サイズD1を特定する幅特定部27と、障害物情報に基づき、路面において移動目標方向72と略直交する方向について、干渉障害物66の大きさD8を算出する算出部23と、空間サイズD1、自機の大きさD2、及び干渉障害物66の大きさD8に基づいて、停止行動又は退避行動を選択する行動選択部24と、停止行動が選択された場合、自機を停止させ、退避行動が選択された場合、自機を退避させる移動制御部25とを備える。
(もっと読む)
車両移動システム及びランドマーク
【課題】自律走行する車両の実際の走行位置と予め設定された走行経路の間のずれを検知する車両移動システムと、その車両移動システムに用いられるランドマークを提供する。
【解決手段】撮像装置11を備えた車両12と、撮像装置11で撮像可能で少なくとも3つが、車両12の走行面13と非平行な平面上にあって、かつ同一直線上にない発光体14〜20と、撮像装置11によって撮像される画像中の発光体14〜20の位置から、走行面13上の特定の基準位置に対する車両12の位置ずれを検出する位置ずれ算出装置21とを有している。
(もっと読む)
移動体制御システム、プログラム、及び移動体制御方法
【課題】複数の撮像部が撮像したそれぞれの画像に基づいて移動体を制御する移動体制御システムにおいて、それぞれの撮像部に対して定められたそれぞれの撮像座標系の対応関係の精度を向上させる。
【解決手段】第1回転中心位置特定部62がそれぞれの第1画像に含まれるそれぞれの第1基準目印に基づいて、第1撮像座標系における第1点に対応する第1回転中心位置を特定する。第2回転中心位置特定部64がそれぞれの第2画像に含まれるそれぞれの第2基準目印に基づいて、第2撮像座標系における第1点に対応する第2回転中心位置を特定する。座標系対応関係保持部66が第1回転中心位置及び第2回転中心位置に基づく第1撮像座標系及び第2撮像座標系の対応関係を示す座標系対応関係を保持する。
(もっと読む)
無人移動車の走行経路計画方法
【課題】従来の無人移動車の走行経路計画方法にあっては、駐車車両などにより道幅が局所的に変化していると、無人移動車が蛇行してしまうことから、走行速度を上げることができないという問題点があった。
【解決手段】環境認識手段Sにより取得した前方の環境データから走行可能領域Qを判断して走行する無人移動車Vにおいて走行経路Rを計画するに際し、環境認識手段Sで認識可能な前方距離及び現在の上限走行速度に基づいて決定される前方距離のうちの短い方の前方距離Lと一定の左右幅Wとを有するフィッティングエリアFAを、走行可能領域Q内で最大の曲率半径と最大の左右幅とを取るように設定し、このフィッテングエリアFAの中央線を走行経路Rとすることにより、走行可能領域Qの幅が局所的に変化するようなことがあっても、無人移動車Vを蛇行させることなく高速走行させることができる。
(もっと読む)
41 - 60 / 462
[ Back to top ]