
Fターム[5H301GG09]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655) | 非接触式検出手段であるもの (1,408) | 光学式検出手段であるもの (1,003) | 撮像手段であるもの (462)
Fターム[5H301GG09]に分類される特許
21 - 40 / 462
車両用障害物検出装置及びそれを用いた車両
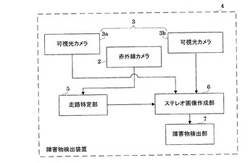
【課題】走路上の障害物を検出する障害物検出装置を提供する。
【解決手段】
車両前方を撮影する赤外線カメラ2と、車両前方を撮影するステレオカメラ3と、赤外線カメラ2により撮影された赤外線画像を基に走路を特定する走路特定部5と、ステレオカメラ2により撮影された各画像に基づいてステレオ画像を作成するステレオ画像作成部6と、走路特定部5により特定された走路とステレオ画像とに基づいて、走路上の障害物を特定する障害物検出部7とを備える。
(もっと読む)
ロボット掃除機及びその制御方法

【課題】停止せずに走行方向を変更するために停止せずに掃除領域を掃除するのにかかる時間を減少させることができる、ロボット掃除機及びその制御方法に関する。
【解決手段】ロボット掃除機は、掃除領域を走行しながら確保した位置データに基づいて、掃除を行う区域を設定し、前記掃除を行う区域を掃除できるように掃除経路を予め設定し、前記掃除経路にジグザグ走行経路が含まれると、ジグザグ走行経路に沿って移動中に、曲線走行して方向を転換することによって、走行方向の転換時に、掃除領域を掃除するのにかかる時間を減少させることができる。
(もっと読む)
地図処理方法及びプログラム、並びにロボットシステム
【課題】地図処理方法及びプログラム、並びにロボットシステムにおいて、複数の推定器が推定した位置姿勢を高精度に統合することを目的とする。
【解決手段】互いに異なるセンサからの入力に基づいて自己位置を推定する複数の推定器の信頼度をこれらの推定器に対応する信頼性評価モデルを用いて評価する評価処理と、これらの複数の推定器からの推定結果に対して信頼性に応じた異なる統合処理を行う結合処理をコンピュータに実行させるように構成する。
(もっと読む)
経路探索機能付き移動体
【課題】地図データ上で自己位置と最終目標点が特定されたときに、自己位置から移動可能範囲内を伸びて最終目標点に至る大域経路を計算する技術が知られている。障害物を検出したときに、障害物を回避しながら最終目標点に至る経路を計算する技術も知られている。しかしながら両者を融合する技術が未解決であり、障害物を回避してから大域経路に復帰する経路がうまく計算できない。
【解決手段】障害物回避経路計算手段で用いる最終目標点に代えて中間目標点を用いる。障害物よりも遠方にある大域経路上の点を中間目標点とすると、障害物を回避してから大域経路に復帰する経路を計算できる。
(もっと読む)
地図処理方法及びプログラム、並びにロボットシステム
【課題】地図処理方法及びプログラム、並びにロボットシステムにおいて、独立して作成された複数の地図の座標系が異なる場合であっても、高精度にこれら複数の地図の座標系を統合することを目的とする。
【解決手段】ロボットの第1のセンサの計測情報に基づき予め生成された第1の地図と、ロボットの各位置での第1のセンサの計測情報とに基づいて第1の地図上の自己位置を推定し、第2のセンサの計測情報に基づき予め生成された第2の地図と、各位置での第2のセンサの計測情報とに基づいて第2の地図上の自己位置を推定し、ロボットの第1の地図上の第1の移動軌跡と第2の地図上の第2の移動軌跡とに基づいて予め算出された、前記第1の移動軌跡の第1の座標系を前記第2の移動軌跡の第2の座標系へ非線形マッピングする座標変換パラメータに基づいて、推定されたロボットの第1の地図上の自己位置を第2の地図上の自己位置に変換するように構成する。
(もっと読む)
無人搬送システム
【課題】施工に手間がかかるとともに汚れや損傷に弱い分岐指示用部材を不要とし、無人搬送車を誘導ラインに沿って目的地まで確実に走行制御可能な、無人搬送システムを提供する。
【解決手段】無人搬送システム1は、分岐部G〜Jを有し複数の走行路を形成する複数の誘導ラインLと、誘導ラインに沿って走行する無人搬送車2と、誘導ラインを含む画像を撮像する撮像装置3と、この画像に関する画像情報に基づいて誘導ラインに沿って無人搬送車を現在地から目的地まで走行制御する走行制御装置4と、を備える。各誘導ラインは互いに異なる色の識別パターンからなる。走行制御装置は、現在地および目的地を結ぶ誘導ラインを設定し、画像の誘導ラインの識別パターンと設定した誘導ラインの識別パターンとを照合しながら、設定した識別パターンの誘導ラインに沿って無人搬送車を現在地から目的地まで走行制御するように、構成されている。
(もっと読む)
移動駆動ユニットの動きを調整するシステムおよび方法
【課題】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法を提供する。
【解決手段】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
(もっと読む)
無人搬送車の誘導ライン撮像装置、および無人搬送車
【課題】白とびのない画像データを生成することができる誘導ライン撮像装置、および該装置を備えた無人搬送車を提供する。
【解決手段】本発明に係る誘導ライン撮像装置は、路面に敷設された誘導ラインに沿って走行する無人搬送車に備えられた誘導ライン撮像装置であって、誘導ラインを含む領域を撮像面で光学的に撮像して該領域の画像データを生成する撮像手段と、撮像する領域を照射面から照射した光によって照らす1つ以上の照明手段と、撮像面上に設けられた第1偏光フィルタ6と、照射面上に設けられた第2偏光フィルタ7とを備え、第1偏光フィルタ6を透過し得る光L5の振動方向および第2偏光フィルタ7を透過し得る光L2(L3)の振動方向が異なることを特徴とする。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2と、該誘導ライン2に沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1であって、誘導ライン2は、区間によって異なるライン幅を有し、無人搬送車3は、誘導ライン2を含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおけるライン幅に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部6と、を有することを特徴とする。
(もっと読む)
車両遠隔操作装置、車両遠隔操作方法及びプログラム
【課題】車両と障害物との接触を回避しつつ、当該車両を遠隔から安全に操作する。
【解決手段】車両30を移動させる際に、まず、車両の現在の位置と、目標位置との間の軌跡を算出する(ステップS204)。次に、算出した軌跡に沿って、車両を駐車スペースPSから目標位置まで移動させる(ステップS208,S210)。その際、撮影装置21から出力される画像情報によって規定される画像に対して、車両の軌跡上に位置する障害物の検出を行う(ステップS207)。そして、車両の軌跡上に障害物が検出された場合に、車両の移動を停止する(ステップS209)。
(もっと読む)
歩行ロボット装置及びその制御プログラム
【課題】環境地図の作成と自己位置推定を、求められる精度を確保しつつ、安価に実現することのできる歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】環境地図を作成する機能は、2ヶ所において撮影した地図作成用環境画像から撮影対象物を示す代表点を抽出し、代表点の位置と撮影した位置座標とから撮影対象物の位置座標を求め、撮影した地図作成用環境画像、代表点の位置及び前記撮影対象物の位置座標とを関連付けた環境地図を作成する。自己位置を推定する機能は、任意の位置座標において撮影した位置推定用環境画像中の撮影対象物の代表点に、対応する地図作成用環境画像中の撮影対象物の位置座標を対応させ、交会法によって前記歩行ロボット装置の自己位置を算出する。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
カメラ付スキーロボット
【課題】
赤外線対人検知式自動追尾型カメラを支持し、ラジオコントロール操作により、被写体スキーヤーと共に滑りながら、優れた映像を撮影することを可能とした、スキーロボットを提供する。
【解決手段】
駆動装置を内蔵する箱型のケース本体の底部には、先端が筒体となっている左右それぞれ2本の足を設け、スキー板の上面に固定されている棒状の門型支持具の水平部の棒体が前記筒体に回転自在に貫通し、該水平部の棒体の中央部から、頂部に筒部を形成する垂直支持体を垂設し、前記ケース本体の上方側面を貫通する貫通孔に貫通するコの字状の棒体が前記筒部に回転自在に嵌合し、前記ケース本体の上部に、赤外線対人検知式自動追尾型カメラを設けるとともに該ケース本体の後方部に先端が鋸刃状の鍬状体を設けてなるカメラ付スキーロボットとして課題を解決している。
(もっと読む)
走行ロボットのやり直し走行、そのティーチング方法および制御方法
【課題】パスとランドマークの系列からなる経路情報に基づいて出発点から目的地点まで移動する歩行ロボットが、経路上にある障害物や道路工事中の箇所に遭遇したとき、走行できなくなる。そこで、経路情報に基づく走行を中断し、走行をやり直してから元の経路に戻る方法が課題である。
【解決手段】走行をやり直す方法を定型経路情報で表し、ティーチングで作成する。定型経路情報とは、経路情報を構成するパスやランドマークの種類や順序は決まっているが、パスの始端・終端の位置方位などの値は、実行時のセンサーのデータや通路幅などによって決まる形式の経路情報を言う。
【効果】走行ロボットの車体やセンサー、コンピュータなどは常に改良されて行く。改良の度にソフトウエアを修正する労力と現場でテストするのは大変である。本発明は、定型経路情報をティーチングにより改良するだけで良いので、労力と手間が大幅に少なくなる。
(もっと読む)
自律移動体、自律移動体の向き補正方法及び自律移動体の向き補正プログラム
【課題】走行経路上の位置が異なる場合であっても、同一の処理内容で簡易かつ効率的に自装置の向きを補正することを課題とする。
【解決手段】LRS101が自装置の走行経路方向に所在する壁を含む障害物の複数の計測点に関する情報を取得し、障害物データ生成部109aが隣接する2つの計測点を始点及び終点とする複数のベクトルデータを生成し、ベクトル変換処理部109bが各ベクトルデータの向きを直角分回転補正して±45度の範囲内の向きを持つ各ベクトルデータに変換処理し、補正角度算出部109cが各ベクトルデータの向きと自装置の向きを示す0度とのなす角度を補正角度として算出し、向き補正部109eが補正角度に基づいて自装置の向きを補正する。
(もっと読む)
移動体マップ装置、その処理方法及びプログラム
【課題】地図情報のメモリ容量を効率的に低減させつつ、地図情報の更新を適切に行うことができる移動体マップ装置、その処理方法及びプログラムを提供すること。
【解決手段】移動体マップ装置は、地図情報を記憶する第1記憶手段と、移動体の現在位置を検出する位置検出手段と、移動体の移動状態を検出する状態検出手段と、第1記憶手段の地図情報の中から、移動体の現在位置を含む所定領域を読出す読出手段と、第1記憶手段の地図情報から読み出された所定領域を、一時的に記憶する第2記憶手段と、位置検出手段により検出された移動体の現在位置と、状態検出手段により検出された移動体の移動状態と、に基づいて、移動体が所定領域内から外れるときの移動体の移動位置を予測する移動予測手段と、を備える。読出手段は、第1記憶手段の地図情報の中から、移動予測手段により予測された移動位置を含む所定領域を予め読出し、第2記憶手段に記憶させる。
(もっと読む)
屋内用自律走行移動体の自己位置測定方法及び装置
【課題】人間がいるエリアを自律走行する場合であっても、屋内用の自律走行移動体の自己位置を、光源の追加無しに、同じエリアの人間に視覚的な違和感を持たせにくく、かつ、周辺の環境状態の影響を受けにくい形態で測定すること。
【解決手段】走行台車1に搭載したビデオカメラ4aの撮影画像中に、天井の複数の照明器3のうち最低1個が常に入るようにした。そして、各照明器3は、自己のユニークなID番号のパターンで変調した照明光を発光し、ビデオカメラ4aで撮影した照明器3とその設置位置を、受光センサ4bが受光したその照明器3からの照明光を復調して得たID番号に基づいて照合する。照合した照明器3の設置位置と、ビデオカメラ4aの撮影画像から計算したビデオカメラ4a乃至走行台車1からの照明器3の相対位置とに基づいて、走行台車1の自己位置を測定する。
(もっと読む)
無人移動体及び無人移動体の制御方法
【課題】道路のある環境下で且つ道路や交差点に関する事前情報が一切ない状況下で、曲がり道や交差点を道なりに走行させることができ、交差点での右左折も曲折の指示のみで円滑に行わせ得る無人移動体及び無人移動体の制御方法を提供する。
【解決手段】特に指示がない場合には、それまで走行してきた走行路に継続し易い道なり走行路Rを測距データに基づいて局所地図上で抽出して、この道なり走行路Rに沿って半自律走行車Aを自律走行させ、交差点Cで他の走行路Rlへ向かわせる場合には、交差点進入時に受ける新規操舵指令に従った他の走行路Rlへの変更路Rcを設定して、この変更路Rcを介して半自律走行車Aを他の走行路Rlへ進行させる。
(もっと読む)
巡回ロボット及び巡回ロボットの自律走行方法
【課題】巡回ロボットを効率よく走行させる。
【解決手段】巡回ロボット1では、走行管理手段1dの指示により、経路生成手段1cが、現在地点から次の目標の指定地点までの巡回経路情報を生成し、自律走行制御手段1eが、巡回経路情報に基づく巡回経路を自律走行する。走行途中、通行不可の経路が検出されて停止したときは、走行管理手段1dは、停止した位置を現在地点とするとともに、通行不可の経路を走行可能経路から外して再度経路生成手段1cに巡回経路を再生成させ、変更された巡回経路を走行される。走行管理手段1dは、通行不可と判断された経路が、所定の時間が経過するまで巡回経路に組み込まれないようにする。
(もっと読む)
自律走行体
【課題】不整地・未舗装路においても高速移動可能な経路を作成し、また、舗装路においても道路形状及び自律走行体の運動特性を考慮した走行経路を作成して高速走行ができるようにする。
【解決手段】本発明は、測距部31により走行領域内の測距データを取得する測距データ取得手段30aと、その測距データに基づいて、局所地図を作成する局所地図作成手段30bと、その局所地図に基づいて、自己位置から続く走行可能エリアを抽出し、走行可能エリア地図を生成する走行可能エリア地図作成手段30cと、走行可能エリア地図に基づいて、道なり方向を設定する道なり方向設定手段30fと、設定された道なり方向に基づいて、走行経路を生成する走行経路生成手段30gと、自己位置、及び方位データを取得する自己位置データ取得手段30hと、生成した走行経路及び自己位置データに従って、走行機構を介して走行させる自律走行手段10aとを有する。
(もっと読む)
21 - 40 / 462
[ Back to top ]