
Fターム[5H301KK02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 移動体の目標位置を制御するもの (105)
Fターム[5H301KK02]に分類される特許
1 - 20 / 105
搬送車システム
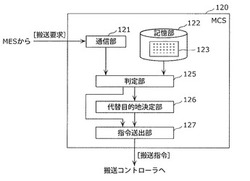
【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
(もっと読む)
処理設備

【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
搬送システム
【課題】搬送車両の充電作業が搬送作業に与える影響を従来よりも低減すると共にバッテリの大型化を抑制する。
【解決手段】蓄電池によって駆動され、電力を外部から受電及び外部に給電する複数の搬送車両3と、搬送車両3が走行する複数の走行軌道1A,1Bと、ある走行軌道1Aと他の走行軌道1Bとが隣接するエリアであって、ある走行軌道1Aを走行する搬送車両3と他の走行軌道1Bを走行する搬送車両3とが給電/受電する受給電エリアKa,Kbとを具備する。
(もっと読む)
走行データ生成装置
【課題】走行データを生成するために予め記憶手段に記憶しておくデータの量を抑制できる走行データ生成装置を提供すること。
【解決手段】上位プロコンより行先指令が通知されると、無人搬送車両を走行させるために必要な動作コマンド列が、事前に設定されるテーブルから必要分抽出されて、動作コマンド列全体が生成される。本実施形態では、走行経路R上に配置されるステーションCの中から、隣設する3つのステーションCの組み合わせだけを全て求め、その各組み合わせに対応する動作コマンド列をテーブルに設定している。よって、隣設するもの及びしないものを含む2つのステーションCの各々について、その組み合わせを全て(総当たりで)求め、その組み合わせに対応する動作コマンド列をテーブルに設定するよりも、ステーションCの組み合わせの数を少なくできるので、テーブルのサイズを小さくできる。
(もっと読む)
操舵制御装置
【課題】搬送車両に多数の車軸が設けられている場合でも、その搬送車両を走行経路に沿って円滑に走行させることができる操舵制御装置を提供すること。
【解決手段】本実施形態では、各走行装置5a〜5lの車軸6aに対して操舵角θ1〜θ12を設定する場合に、操舵角設定テーブル72cから、各操舵角θ1〜θ12を取得している。よって、計算式により各操舵角θ1〜θ12を算出する場合よりも、演算量を少なくできるので、CPU71の演算時間も短くできる。従って、本実施形態のように、走行装置5a〜5lの数が多い場合でも、CPU71に掛かる負担が大きくならず、演算時間も長くならない。故に、各操舵角θ1〜θ12の設定を短い周期で実行することができ、走行経路R上に沿って無人搬送車両1を円滑に走行させることができる。
(もっと読む)
搬送用走行体の走行制御方法
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、軌道に配置されたマークを確実に検出する。
【解決手段】有軌道台車システムは、天井又は天井近傍に敷設された軌道100と、軌道に沿って走行する台車とを備える。台車は、軌道の走行面部上を走行する走行部210と、走行部から軌道の間隙を利用して懸垂される台車本体部220と、走行部及び台車本体部のうち一方に設けられる検出手段610と、走行部及び台車本体部のうち他方に設けられ、検出手段から照射された光を検出手段へと反射させる反射手段620とを有している。軌道は、所定位置における走行面部から、検出手段及び反射手段間の光路を遮るように間隙側に突出するマーク部630を有している。
(もっと読む)
ネットワークシステム、コントロール方法、コントローラ、およびコントロールプログラム
【課題】コントローラからの指令に基づいて移動する模型装置を利用した新たなネットワークシステムを提供する。
【解決手段】コントローラ100は、模型装置を移動させるための指令を受け付け、指令を模型装置へ送信する。模型装置200は、コントローラからの指令に基づいて模型装置を移動させ、模型装置の前方を撮影し、模型装置の位置を取得し、模型装置の向きを取得し、撮影画像と位置と向きとをコントローラに送信する。コントローラは、模型装置から受信した位置と向きとに基づいて、模型装置用のコースのデータから表示用のバーチャル画像を作成し、模型装置から受信した撮影画像とバーチャル画像とを合成した画像をディスプレイ130に表示させる。
(もっと読む)
搬送車システム
【課題】複雑な処理を行うことなく搬送車の集中を防ぎ、搬送車を効率良く運用することができる搬送車システムを提供する。
【解決手段】第一ステーションエリア20と第二ステーションエリア30との間の搬送経路を走行し物品の搬送を行う複数の搬送車200と、複数の搬送車200を制御する制御装置100とを備える搬送車システム10であって、制御装置100は、ステーション21への物品の搬出に向かう搬送車200であって、搬送経路内の所定区間を走行する搬送車200である対象搬送車の台数を計測する計測部110と、計測部110が計測した台数が所定の値を超えた場合に、対象搬送車に含まれる少なくとも1台の搬送車に、ステーション21への物品の搬出後に、ステーション22からの物品の搬入を行わせる搬出入指示部120とを備える。
(もっと読む)
搬送車
【課題】左右の車輪を独立して駆動可能な搬送車において、簡単な構成及び制御による位置決めフィードバックを可能にする。
【解決手段】搬送車3において、第1走行車輪25及び第2走行車輪28は、搬送車本体15の左右に設けられている。第1モータ26及び第2モータ29は、第1走行車輪25及び第2走行車輪28にそれぞれ接続され、さらに、第1モータ制御部63及び第2モータ制御部64にそれぞれ接続されている。速度パターン発生部62は、第1モータ制御部63が第1モータ26を位置決め制御するときに、第1モータ制御部63が生成した速度指令を受信し、次に当該速度指令を第2モータ制御部64に送信する。第2モータ制御部64は、第1モータ制御部63が生成した速度指令を第2モータ29に与える。
(もっと読む)
無人搬送車
【課題】加熱炉外の出発点から加熱炉内の目標点まで正確に走行できると共に、加熱炉外のスペースを有効利用できるようにした無人搬送車を提供する。
【解決手段】荷役ステーションから加熱炉Yに向かって走行する無人搬送車1を、加熱炉Yの外部において第1および第2ガイドセンサ78a,78bと第1マークセンサ79aとを使用して走行させ、加熱炉Yの内部において第1〜第3レーザセンサ80a,80b,80cとを使用して走行させることで、加熱炉Yの内部に設定された停止位置(目標点)に停止させることができる。
(もっと読む)
搬送車システム
【課題】搬送車の自動走行を継続させつつ、作業用エリアへの搬送車の侵入を防止することが可能な搬送車システムにおいて、作業用エリアでの安全性を向上させる。
【解決手段】搬送車システム1について説明する。搬送車3は、軌道2に沿って走行する。第2光電センサ48は、搬送車3に設けられている。通行禁止ゲート71は、軌道2に設置可能であり、第2光電センサ48によって検出可能なミラー87を有する。第1リミットスイッチ95は、軌道2に設けられ、通行禁止ゲート71が軌道2に設置されたことを検出する。コントローラ本体54は、第2光電センサ48からの検出結果によって通行禁止ゲート71が設置されたことを把握すれば、通行禁止ゲート71の片側を自動走行許可エリアに設定することを有効にする。
(もっと読む)
無人搬送車および走行制御方法
【課題】障害物を回避する無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】経路データ上に、回避距離を予め設定しておき、進行方向前方に障害物1701を検知すると、回避距離だけ横行した後、前方へ走行することを特徴とする。また、回避距離は、回避方向と共に経路データにおける区間毎に設定されていてもよい。さらに、回避経路を走行中に取得した計測データに、障害物1701が検出されなくなったときから、車長+所定距離だけ前方に移動した後、元の経路1702に戻る。
(もっと読む)
無人搬送車および走行制御方法
【課題】自車位置の推定精度を向上させる無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】計測データと地図データ132とのマッチングにおいて、不一致箇所が検出されても、その不一致箇所をマッチングの対象から除外するマスクエリア510を、地図データ132において設定することを特徴とする。無人搬送車の位置推定の際には、その不一致箇所を除外した計測データを用いる。マスクエリア510には、無人搬送車の走行エリアにおいて、レーザ距離センサで計測するたびに状況が変わるエリア(例えば、パレット置場や、充電器置場など)が設定されるのが望ましい。
(もっと読む)
搬送車システム
【課題】 搬送車に効率的に充電できるシステムを提供する。
【構成】 蓄電部材を電源として走行する複数台の搬送車を、所定の走行経路に沿って、地上側コントローラの制御下に走行させる。走行経路は搬送車の蓄電部材への充電設備を備えた充電エリアを備え、搬送車は位置と蓄電部材の残容量とを地上側コントローラへ報告する。地上側コントローラは、蓄電部材の残容量が閾値以下の搬送車を充電エリアへ走行させて、蓄電部材に充電させると共に、搬送要求に応じて充電エリア内の搬送車を充電エリア外の位置へ走行させる。
(もっと読む)
無人搬送車走行方法及び無人搬送車走行システム
【課題】合流点や交差点での無人搬送車の待ち合わせの発生を抑えることができる無人搬送車走行方法及び無人搬送車走行システムを提供する。
【解決手段】無人搬送車走行システム1は、複数台の無人搬送車(AGV)2と、コントローラ6と、メモリ8とを備えている。無人搬送車2は、予め決められた走行経路に沿って走行し、移載装置に荷物を搬送する。メモリ8には、無人搬送車2が走行する走行経路を複数のブロックに分割してなる走行経路ブロックデータが設定記憶されている。コントローラ6は、無人搬送車2により搬送される荷物が移載装置に到着する予定時刻を計算し、出発地ブロックから目的地ブロックまでの各ブロックにおける無人搬送車2の通過時刻を、目的地ブロックから出発地ブロックに向かって順次予約していき、無人搬送車2が走行を開始する時刻を求め、その走行開始時刻のデータを当該無人搬送車2に送信する。
(もっと読む)
物品搬送装置
【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
走行台車システムとその自己診断方法
【課題】
移動体システムでのトラブルの発生を予防する。
【構成】
複数の走行台車が地上側コントローラの指示により走行経路に沿って走行するシステムを自己診断する。地上側コントローラは、走行経路上の位置を一意に特定する絶対座標により、異常検出用センサによる検出を行う位置を走行台車に指定し、走行台車は、指定された位置で異常検出用センサによる検出を行い、検出位置と検出時刻を含む検出データを地上側コントローラへ報告する。
(もっと読む)
移動体の制御システム
【課題】無線通信装置の受信能力の低下による通信障害の発生を予測できる移動体の制御システムを提供すること。
【解決手段】移動体が、その走行位置を検出する走行位置検出手段と、無線通信装置にて受信する運行情報及び走行位置検出手段にて検出される走行位置情報に基づいて走行作動を制御する走行制御装置とを備えて構成され、運行制御装置が、移動体が無線通信装置にて送信する走行位置情報Pp、及び、無線通信装置が通信中継装置から受信している無線信号の受信強度を示す受信強度情報Prに基づいて取得される移動体の走行位置に対応した受信強度と、当該走行位置についての基準受信強度Ls1・Ls2とを比較して、無線通信装置の受信能力が低下している受信能力低下状態であるか否かを判別する受信能力評価手段を備えて構成されている移動体の制御システム。
(もっと読む)
ステレオカメラによる平面検出方法とこの方法を用いた移動ロボット
【課題】Hパラメータ推定の安定性を高めることができ、舗装路、砂利道、泥地、砂地、草原等の様々な帯域の模様をもつ平面領域を検出でき、撮影位置の変化による平面検出上の抜けを防ぐことができ、これにより、平面検出の安定性を高めることができるステレオカメラによる平面検出方法とこの方法を用いた移動ロボットを提供する。
【解決手段】異なる標準偏差を有する複数のLOGフィルタを設定し、最大の標準偏差を有するLOGフィルタを用いて画像情報取得ステップと射影変換行列算出ステップを実行し、最大の標準偏差による射影変換行列を動的に推定し(S101〜S104)、次いで、推定した射影変換行列を初期値として、順次小さい標準偏差を有するLOGフィルタを用いて画像情報取得ステップと射影変換行列算出ステップを実行して順次小さい標準偏差による射影変換行列を動的に推定し、これを最小の標準偏差を有するLOGフィルタまで繰り返して最終の射影変換行列を動的に推定する(S111〜S112)。
(もっと読む)
1 - 20 / 105
[ Back to top ]