
Fターム[5H301LL02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 衝突防止 (2,071) | 移動空間内の人間に対するもの (118)
Fターム[5H301LL02]に分類される特許
1 - 20 / 118
重症心身障害者の自立的移動支援装置
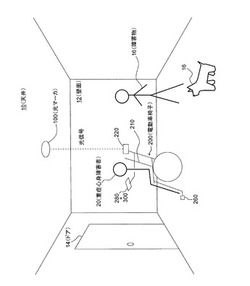
【課題】床にテープやガイドライン等を配置する必要が無く、レイアウト変更に対応可能な、重症心身障害者の自立的移動支援装置を提供する。
【解決手段】重症心身障害者の自立的移動支援装置において、移動空間の天井10や壁面12に配設された、該移動空間や移動装置200の進行方向に関する情報を発信するためのマーカ100と、移動装置200に配設された、前記マーカ100からの信号を受信するための受信手段220、周囲の壁面12や障害物16までの距離と方位を検出するための測位手段240、移動先を重症心身障害者20が指定可能な入力手段280、前記測位手段240の測定結果や前記マーカ100からの信号に基づき移動方向を判断して、前記入力手段280で指定された移動先まで移動装置200を移動するよう制御するための制御手段320、及び、該制御手段320の出力により移動装置200を駆動する駆動手段340と、を備える。
(もっと読む)
走行制御装置および車両

【課題】衝突回避対象の物体の種別に応じて、安全に物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】対象物の種別に応じて、その対象物に接触されているバネ73のバネ定数を設定し、そのバネ定数を使用して、収縮したバネ73から車両に加えられる反発力を算出する。これにより、対象物の種別に応じて適宜バネ定数を定義することにより、対象物の存在によって車両に加えられる反発力Frを、対象物の種別に合わせて大きくしたり、逆に、小さくしたりすることができる。よって、優先的に衝突を回避しなければならない物体については、より強い反発力が車両に加えられるようにすることができるので、衝突回避対象の対象物の種別に応じて、安全に物体の衝突回避を行うことができる。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
自律移動体
【課題】自律移動体が移動する障害物を避けながら移動する際に、障害物に接近しすぎることがなく、障害物が移動する流れに沿って移動しながら目的地に到達する経路を探索する自律移動体を提供する。
【解決手段】自律移動体と移動障害物の間に仮想粘性力と仮想斥力が作用するとし、経路探索技術で用いる移動コストに仮想粘性力と仮想斥力を含める。また、分岐点を仮に選択して移動コストを計算する際には、その分岐点を通過する時点における移動障害物の位置と速度を予測して仮想粘性力と仮想斥力を計算する。移動障害物に接近しすぎると移動コストが増大し、移動障害物の流れに沿って移動すると移動コストが低下することから、移動障害物に接近しすぎることがなく、しかも移動障害物の流れに沿って移動する経路が探索される。
(もっと読む)
自律移動装置
【課題】広範囲の地図情報を有し、且つ建物の窪みや行き止まりなどに進入しても脱出可能であり、目的地までの到達を保証する自律移動装置を提供する。
【解決手段】従来の自律移動装置は現時点で観測している障害物マップのみに基づいて局所経路を探索するため、建物の窪みや行き止まりなどに進入した場合、自律移動装置は次の経由点を探索できず、停止してしまう。そこで、障害物マップを保存・累積する機能を設け、累積した障害物マップから局所マップを作成する。こうすることで、前記障害物に進入した場合でも、過去の障害物マップを累積した局所マップを参照することで次の経由点に至る局所経路が探索され、前記障害物から脱出できる。局所マップは次の分岐点に到達するまで消去されないため、確実に次の分岐点に到達でき、結果として目的地までの到達が保証される。
(もっと読む)
経路探索機能付き移動体
【課題】地図データ上で自己位置と最終目標点が特定されたときに、自己位置から移動可能範囲内を伸びて最終目標点に至る大域経路を計算する技術が知られている。障害物を検出したときに、障害物を回避しながら最終目標点に至る経路を計算する技術も知られている。しかしながら両者を融合する技術が未解決であり、障害物を回避してから大域経路に復帰する経路がうまく計算できない。
【解決手段】障害物回避経路計算手段で用いる最終目標点に代えて中間目標点を用いる。障害物よりも遠方にある大域経路上の点を中間目標点とすると、障害物を回避してから大域経路に復帰する経路を計算できる。
(もっと読む)
移動予測装置、ロボット制御装置、移動予測プログラムおよび移動予測方法
【構成】移動予測装置10は複数のLRF12およびロボット14を備える。また、予測移動装置10は、複数のLRF12によって人々の移動軌跡を記録し、分析することで短期的な移動の目標となる経由点vを空間に設定する。人の移動は複数の経由点を含む経由点系列によって表すことができ、この経由点系列は、そのときの移動時間tおよびその経由点系列の移動遷移確率pが関連付けられて、経由点リストLに記録される。そして、移動予測装置10は、経由点リストLを利用して、予測移動時間T後において、人が各経由点vへ到達する到達確率Pを算出する。
【効果】移動予測装置10は、各経由点vへの到達確率Pに基づいて、人が到達する位置を予測することができる。また、予測された到達位置または設定された各経由点vに基づいて、ロボット14の行動を決めることができる。
(もっと読む)
歩行者の軌跡を予測して自己の回避行動を決定するロボット
【課題】周囲の通行への影響を抑制しながら歩行者と安全にすれ違う。
【解決手段】自律的に行動するロボットRは、自己とすれ違う歩行者Thの軌跡を示す歩行者モデルを記憶しており、自己および歩行者Thの位置を検出して、検出結果および歩行者モデルに基づいて自己とすれ違う歩行者Thの軌跡を予測し、予測結果に応じて自己の回避行動を決定する。
(もっと読む)
移動体遠隔操縦システムおよびそのための制御プログラム
【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
移動体
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
自律移動ロボットのエレベータ乗降方法
【課題】周囲の環境などに影響されずに、エレベータ籠内の状態を感知し、人との共用を排他的に制限し、人のエレベータ利用時の安全性向上を図ることを目的とする。
【解決手段】上記目的を達成するために、本発明は、エレベータ籠に乗降して複数の階にわたる領域を自律的に移動する自律移動ロボットとエレベータ装置によるエレベータ乗降システムであり、前記自律移動ロボットは自身の周囲の環境を検出する環境センシング手段と、後述の乗降システム制御部と所定の信号の送受信を行なう無線通信手段を備え、前記エレベータ装置はエレベータ籠とエレベータへの搭乗するためにエレベータ籠を呼び出すエレベータ籠呼出部とエレベータ搭乗の出入口となるエレベータ扉とエレベータ籠の重量を検出するエレベータ籠重量検出部と、エレベータ籠を上下移動させるためのエレベータ籠巻上げ部とを備えることを特徴とする。
(もっと読む)
電動車両及びその制御方法
【課題】安全に障害物を回避することが可能な電動車両を提供することを目的とする。
【解決手段】電動車椅子11は、車体部12と、操作者の操作を検出する操作部13と、車体部12の周辺にある障害物を検出する障害物センサ14と、車体部12から操作方向に生成される領域をサーチ領域21として、サーチ領域21内に存在する障害物を、回避すべき障害物と判断する障害物判断部15と、障害物判断部で判断された障害物から離れるための仮想斥力を算出する仮想斥力算出部16と、操作力及び仮想斥力の合力を算出する合力算出部17と、合力の方向へ移動するように制御する制御部18とを備える構成である。
(もっと読む)
移動体
【課題】移動体を適切な移動経路で移動させる。
【解決手段】通路内を走行する移動体であって、センサ11と、センサ11の情報から自己位置を推定する自己位置推定部12と、地図情報を有する地図データ部13と、移動始点から移動終点までのシフト前経路を算出する経路計画部14と、シフト前経路と通路の壁からの距離に基づき経路をシフトさせたシフト後経路を算出する経路シフト処理部15と、シフト後経路を走行するための走行指令値を生成する走行指令値生成部16と、走行指令値に基づき駆動部を制御する走行制御部17とを備える。経路シフト処理部15は、シフト前経路から壁までの距離が長くなる場合のシフト量を、該当箇所に比べて前記側面の壁までの距離が短い箇所において算出したシフト量に基づいて決定し、シフト処理により各経路点からの法線が交わる場合には、法線が交わる経路点から算出されたシフト後経路の経路点のいずれかを除去する。
(もっと読む)
搬送車及び搬送システム
【課題】搬送車において、走行領域に存在する障害物を好適に検出する。
【解決手段】搬送車(200)は、軌道(100)に沿って走行する走行部(210)と、走行部に取り付けられており、被搬送物(400)を積載して搬送可能な搬送部(220)と、搬送部の前面部又は後面部の端部周辺に設けられた一対の障害物センサ(261,262)とを備えている。一対の障害物センサは、正面視して互いにハの字状となるように傾斜して配置されていると共に、正面視して互いの走査範囲(A1,A2)が交差するように配置されている。
(もっと読む)
自律移動体
【課題】干渉する可能性のある障害物が存在する場合に、停止行動又は退避行動を状況に応じて適切に行うことが可能な自律移動体を提供することを目的とする。
【解決手段】自律移動体1は、レーザレンジセンサ12と電子制御装置20とを備える。電子制御装置20は、自機の大きさD2を記憶する記憶部22と、自機が移動可能な領域である通路95の幅方向の大きさを示す空間サイズD1を特定する幅特定部27と、障害物情報に基づき、路面において移動目標方向72と略直交する方向について、干渉障害物66の大きさD8を算出する算出部23と、空間サイズD1、自機の大きさD2、及び干渉障害物66の大きさD8に基づいて、停止行動又は退避行動を選択する行動選択部24と、停止行動が選択された場合、自機を停止させ、退避行動が選択された場合、自機を退避させる移動制御部25とを備える。
(もっと読む)
自律移動体
【課題】移動可能な障害物が安全に通過できるように、停留領域を予め定めることなく、自ら設定した待避方向に移動することが可能な自律移動体を提供する。
【解決手段】自律移動体1は、自機の大きさD2を記憶する記憶部22と、障害物情報を取得するレーザレンジセンサ12と、取得された障害物情報に基づき、干渉障害物66が存在する領域の両端部の位置であって、通路面と平行な面において自機の移動目標方向72と略直交する方向の両端部の位置を示すエッジ点86を特定する障害物特定部233と、自機の大きさD2、及び、エッジ点86に基づいて、待避方向を設定する方向設定部237と、待避方向へ自機が向かうように制御する移動制御部25とを備える。
(もっと読む)
移動体
【課題】ランドマークを誤認識する可能性を低減することが可能な移動体を提供する。
【解決手段】予め設定された測定領域に存在するランドマーク25までの距離及び角度を計測するレーザレンジファインダ12と、前記測定領域を決定する測定領域決定部45を有し、レーザレンジファインダ12の計測結果に基づいて予め教示された走行経路上を走行するように走行を制御する制御装置34とを備える。
(もっと読む)
移動可能領域抽出装置および移動可能領域抽出方法
【課題】移動体が移動する移動領域内の障害物を検出する際に、人や他の自律移動ロボットなど、移動経路上から移動する移動体を障害物として抽出することなく、移動体が目的地まで効率良く移動することができる移動経路を生成するための移動可能領域抽出装置および移動可能領域抽出方法を提供する。
【解決手段】第1の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第1の障害物領域を検出する第1の障害物検出手段と、第2の距離センサが観測した距離の情報に基づいて、障害物の領域を表す第2の障害物領域を検出する第2の障害物検出手段と、第2の障害物領域に基づいて継続的に移動している障害物を移動物として検出し、第1の障害物領域から、該検出した移動物の領域を表す第1の障害物領域を除いた領域を、移動体が移動することができる移動可能領域として抽出する障害物領域抽出手段と、を備える。
(もっと読む)
走行軌道作成装置
【課題】自動走行時、走行環境に合わせて進路を柔軟に変化させつつ、進路変化前後で連続性・一貫性を保持することで交通秩序の乱れを抑制することができる走行軌道作成装置を提供する。
【解決手段】走行軌道作成装置11は、環境情報、他車両情報、自車情報も取得するとともに自車両の位置を同定するセンサ部12と、センサ部12から出力された情報に基づいて自車両の運行計画を立案し、この運行計画に基づいて1又は複数の定型進路を生成する定型進路生成部13と、自車両が行動可能な進路案を1又は複数生成する進路生成部14と、定型進路生成部13から出力された定型進路と、進路生成部14から出力された進路案とに基づいて、自車両の進路を選択する進路選択部15と、進路選択部15から出力された進路に基づいて、自車両を駆動制御する駆動部16と、を備える。
(もっと読む)
移動体装置及び移動制御プログラム
【課題】ロボットを、状況に応じて適切に移動制御する。
【解決手段】ロボットは、2輪速度差方式の移動部と、移動部に保持され、移動部とともに移動する上体部と、上体部に加わる外力ベクトルを取得する外力情報取得部52と、上体部に加わった外力ベクトルの作用点を、上体部の重心位置から並進方向に所定距離だけオフセットした位置に仮想的に置き換える作用点置き換え部54と、置き換え後の作用点を用いて並進方向及び旋回方向のそれぞれにメカニカルインピーダンス(慣性、粘性、弾性)を設定し、移動部の移動を制御する移動制御部56と、を備えている。
(もっと読む)
1 - 20 / 118
[ Back to top ]