
Fターム[5H301LL06]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 衝突防止 (2,071) | 迂回によって衝突を回避するもの (312)
Fターム[5H301LL06]に分類される特許
1 - 20 / 312
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム
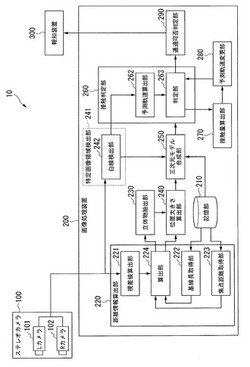
【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
走行装置

【課題】自律歩行が困難な歩行者を安全に先導することができる歩行支援装置を提供する。
【解決手段】移動方向を入力する操作入力部17を有するとともに、走行部を有して任意の方向に走行可能な自走体2と、前記操作入力部で入力された移動方向に基づいて前記自走体の走行を制御する走行制御手段51と、前記自走体の周囲の障害物の位置を検出する障害物検出手段52と、前記障害物検出手段で検出した障害物の位置情報と前記走行制御手段の指令値とに基づいて自走体の前記障害物への接触の有無を判定する障害物接触判定手段53と、該障害物接触判定手段の判定結果に基づいて前記走行制御手段の走行方向を補正する走行方向補正手段54とを備えている。
(もっと読む)
推定装置、推定方法、および推定プログラム
【課題】移動体が特定の領域に位置する場合の推定精度の向上を図ること。
【解決手段】推定装置は、粒子フィルタを用いたシミュレーションにより、直前の移動体の状態を示す粒子群から、現在の移動体の状態を示す粒子群psを推定する。次に、推定装置は、推定された現在の移動体の状態を示す粒子群psに加えて、危険領域Dの近傍領域の状態を示す心配粒子群asを生成する。そして、推定装置は、推定された粒子群psと生成された心配粒子群asとの各粒子の尤度に基づいて、粒子群psをリサンプリングする。これにより、推定装置は、移動体の真の位置が危険領域の近傍領域にある場合に、移動体の位置の推定精度の向上を図ることができる。
(もっと読む)
ロボット操作入力用グリップ及びそれを備えた案内用ロボット
【課題】被案内者が手首を捻らずに把持して入力操作を行うことが可能なロボット操作入力用グリップと、そのロボット操作入力用グリップを備える案内用ロボットを提供する。
【解決手段】基体2の上面に取り付けられ、且つ被案内者によるロボット操作入力用グリップ26への入力操作を検出する入力操作検出部と、入力操作検出部が検出した入力操作に応じて基体2を移動させるための駆動力を発生する移動用アクチュエータを備えた案内用ロボット1であって、ロボット操作入力用グリップ26が備えるグリップ本体部30は、入力操作検出部よりも上方に配置されており、グリップ本体部30が備える十個所のグリップ側凹部32は、グリップ本体部30を回転軸の方向から見て、少なくとも案内用ロボット1の前進方向を含む方向へ放射状に伸びている。
(もっと読む)
ロボット清掃機及びその制御方法
【課題】走行経路上で障害物が感知されても、それがロボット掃除機システムを構成する付加装置領域である場合は、補助掃除ユニットが突出しないように制御するロボット掃除機及びその制御方法を提供すること。
【解決手段】ロボット掃除機は、床を走行する本体、前記本体に近接する障害物を感知する障害物感知部、前記本体の下部に突出及び収納可能に装着された補助掃除ユニット、及び、前記障害物が感知されると、前記補助掃除ユニットが突出または収納されるように制御し、充電器領域を認知し、前記充電器領域では前記補助掃除ユニットが突出しないように制御する制御部を備える。
(もっと読む)
走行制御装置および車両
【課題】衝突回避対象の物体の種別に応じて、安全に物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】対象物の種別に応じて、その対象物に接触されているバネ73のバネ定数を設定し、そのバネ定数を使用して、収縮したバネ73から車両に加えられる反発力を算出する。これにより、対象物の種別に応じて適宜バネ定数を定義することにより、対象物の存在によって車両に加えられる反発力Frを、対象物の種別に合わせて大きくしたり、逆に、小さくしたりすることができる。よって、優先的に衝突を回避しなければならない物体については、より強い反発力が車両に加えられるようにすることができるので、衝突回避対象の対象物の種別に応じて、安全に物体の衝突回避を行うことができる。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
走行制御装置および車両
【課題】車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供すること。
【解決手段】仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー領域71の適用仮想バンパー幅を基準形状の仮想バンパー幅(以下「基準仮想バンパー幅」と称す)である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。
(もっと読む)
飛行経路特定方法およびプログラム
【課題】複数の航空機が衝突を回避しつつ、迅速かつ効率的にそれぞれの目標位置に移動する。
【解決手段】飛行経路特定方法では、複数の航空機のうち任意の1の航空機が、他の航空機の目標位置と飛行経路とを受信し(S200)、他の航空機の目標位置を除く複数の目標位置から、到達までの時間が最短となる、または、到達に要するエネルギーが最小となる目標位置を選択し(S202)、自機の飛行状態に基づいて現地点から目標位置までの飛行経路を導出し(S204)、導出された飛行経路と他の航空機の飛行経路とを比較して、自機と他の航空機とが衝突するか否か判定し(S206)、衝突すると判定した場合、衝突しない飛行経路となるまで、飛行速度または飛行経路自体を変更する。
(もっと読む)
移動体の走行制御装置、走行制御方法、走行制御プログラム
【課題】移動体が外部環境との衝突を回避しながら走行するのに必要となる計算コストを抑制する技術を提供する。
【解決手段】自立走行ロボット1の走行を制御する走行制御部6は、進行方向側に存在する外部環境と、基準点Aと、の間の距離を計測して複数の距離データを生成する距離データ生成部60と、複数の距離データのうち、基準点Aから見て進行方向右側に分類されるものであって、最も小さい距離データを右側最短距離データDminRとして抽出し、複数の距離データのうち、基準点Aから見て進行方向左側に分類されるものであって、最も小さい距離データを左側最短距離データDminLとして抽出する、最短距離抽出部61と、自立走行ロボット1が外部環境との衝突を回避するのに必要となる旋回角θRAを決定する旋回角決定部62と、を備える。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】掃除領域の床面の材質または状態に応じて効率よく掃除作業を行うことができるように改善された構造を有するロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機は、本体と、本体を駆動する駆動輪と、駆動輪を有する駆動輪組立体と、制御部と、を備える。制御部は、被感知体を感知して、基準位置に対する駆動輪の変位を検出し、駆動輪の変位によって床面の材質または状態を判断し、判断された床面の材質または状態によってロボット掃除機の走行を制御する。
(もっと読む)
自律移動体
【課題】自律移動体が移動する障害物を避けながら移動する際に、障害物に接近しすぎることがなく、障害物が移動する流れに沿って移動しながら目的地に到達する経路を探索する自律移動体を提供する。
【解決手段】自律移動体と移動障害物の間に仮想粘性力と仮想斥力が作用するとし、経路探索技術で用いる移動コストに仮想粘性力と仮想斥力を含める。また、分岐点を仮に選択して移動コストを計算する際には、その分岐点を通過する時点における移動障害物の位置と速度を予測して仮想粘性力と仮想斥力を計算する。移動障害物に接近しすぎると移動コストが増大し、移動障害物の流れに沿って移動すると移動コストが低下することから、移動障害物に接近しすぎることがなく、しかも移動障害物の流れに沿って移動する経路が探索される。
(もっと読む)
自律移動装置
【課題】広範囲の地図情報を有し、且つ建物の窪みや行き止まりなどに進入しても脱出可能であり、目的地までの到達を保証する自律移動装置を提供する。
【解決手段】従来の自律移動装置は現時点で観測している障害物マップのみに基づいて局所経路を探索するため、建物の窪みや行き止まりなどに進入した場合、自律移動装置は次の経由点を探索できず、停止してしまう。そこで、障害物マップを保存・累積する機能を設け、累積した障害物マップから局所マップを作成する。こうすることで、前記障害物に進入した場合でも、過去の障害物マップを累積した局所マップを参照することで次の経由点に至る局所経路が探索され、前記障害物から脱出できる。局所マップは次の分岐点に到達するまで消去されないため、確実に次の分岐点に到達でき、結果として目的地までの到達が保証される。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】停止せずに走行方向を変更するために停止せずに掃除領域を掃除するのにかかる時間を減少させることができる、ロボット掃除機及びその制御方法に関する。
【解決手段】ロボット掃除機は、掃除領域を走行しながら確保した位置データに基づいて、掃除を行う区域を設定し、前記掃除を行う区域を掃除できるように掃除経路を予め設定し、前記掃除経路にジグザグ走行経路が含まれると、ジグザグ走行経路に沿って移動中に、曲線走行して方向を転換することによって、走行方向の転換時に、掃除領域を掃除するのにかかる時間を減少させることができる。
(もっと読む)
経路探索機能付き移動体
【課題】地図データ上で自己位置と最終目標点が特定されたときに、自己位置から移動可能範囲内を伸びて最終目標点に至る大域経路を計算する技術が知られている。障害物を検出したときに、障害物を回避しながら最終目標点に至る経路を計算する技術も知られている。しかしながら両者を融合する技術が未解決であり、障害物を回避してから大域経路に復帰する経路がうまく計算できない。
【解決手段】障害物回避経路計算手段で用いる最終目標点に代えて中間目標点を用いる。障害物よりも遠方にある大域経路上の点を中間目標点とすると、障害物を回避してから大域経路に復帰する経路を計算できる。
(もっと読む)
衝突防止機能付き車両
【課題】障害物との衝突を防止しつつ、必要以上に車両の運動が制限されないことを可能とする。
【解決手段】 この車両は、入力された目標速度及び目標進行方向で車体50が所定時間だけ移動するときに車体が通過すると予測される車体通過予測領域と、障害物検知部で検出された障害物の位置とから、車体と障害物とが衝突するか否かを判定する。そして、車体と障害物とが衝突すると判定されるときは、入力部への入力に応じた目標速度及び目標進行方向の少なくとも一方を修正する。車体通過予測領域は、予め設定された車体モデル70に基づいて算出され、その車体モデル70は入力された目標速度及び目標進行方向に応じて変化する。
(もっと読む)
歩行者の軌跡を予測して自己の回避行動を決定するロボット
【課題】周囲の通行への影響を抑制しながら歩行者と安全にすれ違う。
【解決手段】自律的に行動するロボットRは、自己とすれ違う歩行者Thの軌跡を示す歩行者モデルを記憶しており、自己および歩行者Thの位置を検出して、検出結果および歩行者モデルに基づいて自己とすれ違う歩行者Thの軌跡を予測し、予測結果に応じて自己の回避行動を決定する。
(もっと読む)
移動動作決定装置、その方法及びプログラム
【課題】簡素化された構成で確実に障害物を回避し、移動体の最適な経路を決定すると共に、様々な目的に応じた適応的な行動選択を行うことができる移動動作決定装置等を提供する。
【解決手段】検出対象物の大きさに応じてポテンシャルを設定するポテンシャル設定部21と、検出領域を区画する区画検出領域のうちポテンシャルを含んでいる区画検出領域を特定する区画検出領域特定部22と、区画検出領域ごとに、含まれるポテンシャル値を検出値として算出する検出値算出部23と、区画検出領域の組み合わせ検出パターン、及びそれに対応する出力動作を動作設定情報として記憶する動作設定情報記憶部27と、動作設定情報の組み合わせ検出パターンとを比較して、移動体10の出力動作を特定する出力動作特定部24と、特定した出力動作に対して、検出値に基づいて出力動作を最適化して決定する動作決定部25とを備える。
(もっと読む)
経路情報修正装置、軌道計画装置、及びロボット
【課題】障害物と干渉するノードを含まない非干渉経路の算出確率を高めること。
【解決手段】軌道計画装置100は、エッジを介したノード間の接続により構成される経路情報を修正する。軌道計画装置100は、環境情報に基づいて経路情報に含まれるノードの干渉性を判定する干渉判定部42と、干渉判定部42により干渉有りと判定されたノードの周囲に追加ノードを生成する追加ノード生成部70と、干渉判定部42による追加ノードの干渉性の判定結果に応じて、干渉有りと判定されたノードを追加ノードに置き換えるノード置換実行部44と、を備える。
(もっと読む)
自律カバレッジロボットナビゲーションシステム
【課題】ナビゲーションビーコンにより自律モバイルロボットを隣接する有界領域に移動可能とする。
【解決手段】ナビゲーションビーコンは、第1の有界領域と、隣接する第2の有界領域との間のゲートウェイ内に配置されたナビゲーションビーコンによって、ゲートウェイマーキングエミッションを伝送するように構成されたゲートウェイビーコンエミッタを有し、自律カバレッジロボットは、ビーコンエミッションに応答するビーコンエミッションセンサ(104、106)と、ゲートウェイマーキングエミッションの検出に応えてロボットの方向を変える清掃モードで、ロボットを第1の有界領域周辺にて動かすように構成された駆動システムとを含み、駆動システムは、マイグレーションモードにおいて、ゲートウェイを通って第2の有界領域へとロボットを動かす。
(もっと読む)
1 - 20 / 312
[ Back to top ]