
Fターム[5H303CC05]の内容
Fターム[5H303CC05]に分類される特許
1 - 20 / 36
アクチュエータの制御方法及びアクチュエータの制御装置
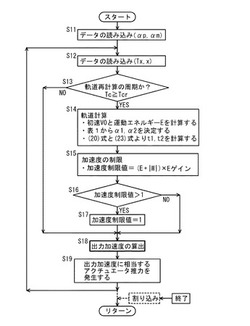
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
モータ駆動装置

【課題】最適なゲイン設定ができるゲイン切換判定手段を有したモータ駆動装置を提供する。
【解決手段】トルク指令25どおりにモータを駆動させるよう制御する電流制御手段3と、ゲイン切換信号34で選択されたゲインで制御する速度フィードフォワード手段4と、ゲイン切換信号34で選択されたゲインで制御するトルクフィードフォワード手段5と、モータ速度30を算出する速度検出手段6と、位置指令速度31を算出する位置指令速度検出手段7と、ゲイン切換信号34をオン/オフするゲイン切換判定手段8と、判定遅延時間設定手段9と、判定閾値設定手段10とを有し、ゲイン切換判定手段8にて判定遅延時間32経過後の位置指令速度31の絶対値が判定閾値33以下であればゲイン切換信号34をオンし、判定閾値33より大きい場合はゲイン切換信号34をオフのままとする。
(もっと読む)
弁開度制御システム
【課題】開又は閉指令を、開度に対応した時間、出力することで、弁を目標開度に操作する場合、目標開度近くで開/閉方向の反転動作を頻繁に繰り返すことなく、目標開度とすることが可能な弁開度制御システムを提供する
【解決手段】弁11を所望の開度に開閉制御する弁開度制御システムであって、弁11の開閉速度に基づき、設定された所望の目標開度に達するまでの開又は閉指令の出力時間を出力時間演算手段17で求め、 この出力時間の間、出力手段と18により弁11に開又は閉指令を出力する。この際、弁11の実測開度を開度制御手段19に入力し、この実測開度と目標開度との差が、予め設定した不感帯の範囲に入ると、弁11に対する開又は閉指令の出力を停止させる。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
位置制御装置
【課題】フルクローズ位置制御において、極低速域の送りで発生するスティックスリップを抑制することができる位置制御装置を提供する。
【解決手段】加算器5および加算器24が、実速度偏差Elに比例ゲインPlを乗算して得られた出力と、実速度偏差Elを積分補償器25に入力して得られた実速度偏差の積分成分Tilと、モータ速度偏差Emに比例ゲインPmを乗算して得られた出力と、モータ速度偏差Emを積分補償器9に入力して得られたモータ速度偏差の積分成分Timと、を加算しトルクフィードバック指令Tfbとして出力する。このとき、積分補償器25と積分補償器9は、積分ゲインKlと積分ゲインKmを速度フィードフォワード指令Vrまたは速度指令Vcの値に応じて調節するために、0から1の間で可変できる係数可変器を備え、ロストモーションの影響が小さい極低速域において積分ゲインKlを大きく設定することで静摩擦トルクから動摩擦トルクへの切換応答速度を早め、スティックスリップを抑制する。
(もっと読む)
位置制御装置
【課題】位置検出にインクリメンタルタイプのパルスエンコーダを使用すると、低速領域ではパルスが発生しなくなるため、低速領域では大きな速度変動が発生する。
【解決手段】位置制御装置のマイナーループに速度制御を持たない位置制御とし、
この位置制御部をPID制御器とし、入力θrefと出力θdet比のPID制御器の伝達関数を次式で求めた後、位置制御部のパラメータKPθ、KIθ、KDθを求めたものである。
θdet/θref=(KDθs2+KPθs+KIθ)/{Jdys3+(KDθ+Ddy)s2+KPθs+KIθ}
(ただし、KPθは比例要素、KIθは積分要素、KDθは微分要素、Jdyはモータ慣性、Ddyは回転損失、sはラプラス演算子)
(もっと読む)
位置制御装置
【課題】 制御対象機械を目標位置へ移動させて停止させるための位置制御装置において、オーバーシュートの抑制とサイクルタイムの短縮を可能にする。
【解決手段】 フィードフォワード制御ブロック27aは位置指令ブロック21からの前記位置指令値に対して、フィードフォワード設定手段41で設定し出力されるフィードフォワードゲインを乗じた値を、新たな補正量として出力する機能を有し、この位置制御装置40が位置決め制御動作を開始すると、フィードフォワード設定手段41では、位置指令ブロック21からのパルス列形式の位置指令値に含まれるパルス周波数の変化に基づく速度指令演算値を求めつつその変化を監視し、この速度指令演算値が予め定めた切換設定値より小さいときにはフィードフォワード制御ブロック27aへのフィードフォワードゲインのより小さく設定することにより、位置決め終了時のオーバーシュートの抑制と位置決め開始から終了までのサイクルタイムの短縮とを可能にしている。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
モータ制御装置
【課題】 フィードバック制御系のサンプリング速度とモデル制御系のサンプリング速度との差に起因する影響を、従来よりも少ない演算量で抑制して、モデル追従制御を実施できるモータ制御装置を提供する。
【解決手段】 速度制御器115は、モデル制御系105のサンプリング速度の遅れに相当する伝達関数を有するローパスフィルタ113と、速度積分器117を含む積分制御系116と、比例制御系118と、速度比例ゲイン乗算部119とを含んでいる。積分制御系116は、加算部SP2によって加算された速度指令とモデル速度指令とを合算した指令から、ローパスフィルタ113から出力された遅延速度情報を減算部SP4で減算した指令を、速度積分器117に入力する。
(もっと読む)
ステージ装置、露光装置、及びステージ制御方法
【課題】ステージを駆動する際に生じる振動を効果的に抑制する。
【解決手段】所定タイミングで検出された制御対象301の位置と所定位置との誤差を、前記タイミングからの時間経過に応じてフィードフォワード制御部102による操作量を変更することによって補正するとともに、フィードバック制御部103への外部入力をフィードフォワード制御部102による補正量に応じて変更する制御部104を備える。
(もっと読む)
モータによる位置制御装置
【課題】
本発明は、フィードバック制御系の構造および応答に無関係に、位置および速度フィードフォワード制御系を周波数応答に基づいて、個別に調整可能となる位置制御装置を提供する。
【解決課題】
本発明は、モータの位置検出値を位置指令値に追従させることを目的としたモータによる位置制御装置において、速度規範指令値を出力する速度規範モデルと、速度制御器と、速度フィードフォワード出力信号を出力する速度フィードフォワード部と、位置規範指令値を出力する位置規範モデルと、位置制御器と、位置フィードフォワード出力信号を出力する位置フィードフォワード部と、から構成されることを特徴とする。
(もっと読む)
サーボゲイン調整装置およびサーボゲイン調整方法
【課題】調整結果中の任意の整定時間と目標位置からの位置ずれ量の組み合わせでサーボ制御装置の制御パラメータの選択を行うことができるサーボゲイン調整装置を得ること。
【解決手段】制御パラメータ一覧情報中の制御パラメータをサーボ制御装置20に設定するパラメータ変更部35と、設定された制御パラメータでの制御対象の位置決め動作時に測定された整定時間と目標位置からの位置ずれ量とを格納する調整結果格納部36と、各制御パラメータで制御対象の位置決め動作を行った調整結果から整定時間と目標位置からの位置ずれ量について作成した散布図と、制御パラメータ一覧情報と、を含む調整画面を表示部32に表示する調整制御部37と、調整画面の散布図または制御パラメータ一覧情報中の任意の位置を選択する入力部33と、を備え、調整制御部37は、選択された位置に対応する制御パラメータを選択制御パラメータとして設定する。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
機械部材の運動経過を制御する方法及び装置
【課題】機械部材の運動経過がオーバーシュートすること又は負の値をとることを効率的に防止する機械部材の制御を可能にする。
【解決手段】関数的依存関係(3,20)が、n次多項式から形成された少なくとも1つの第1のセグメント(I)と、a次多項式から形成された、前記第1のセグメントから少なくとも部分的に分離された少なくとも1つの第2のセグメント(II)を有するようにし、ただし、aはnよりも小さいものとする。
(もっと読む)
ディジタル制御装置とその制御方法
【課題】 サーボ剛性を上げ,且つフィードフォワードの位相を調整することで位置指令に対してオーバシュートの少ない位置決めができるディジタルサーボ制御装置とその制御方法を提供する。
【解決手段】 位置制御部(1)と、速度制御部(2)と、を備えるディジタル制御装置において、位置指令を2回微分した値に慣性モーメント設定値を乗じてトルクフィードフォワード信号を生成するトルクFF生成部(5)と,mを正の実数として、位置指令をmサンプリング遅らせて第1位置指令を生成する一段目位相調整部(7)と,nを正の実数として、第1位置指令をさらにnサンプリング遅らせて第2位置指令を生成する二段目位相調整部(8)と、第1位置指令を1回微分し速度フィードフォワード信号を生成する速度FF生成部(6)と,gを正の実数として、位置検出値を微分した速度に対してgサンプリング先の速度フィードバック値を生成する速度生成部(9)とを備えた。
(もっと読む)
リニアアクチュエータ
【課題】ディジタル処理上で発生する遅延時間をみかけ上補正したフィードバック信号を生成することを可能としたリニアアクチュエータを実現する。
【解決手段】面モータを有するスライダの位置検出値と位置指令値との偏差を演算して速度指令値を出力する位置制御手段と、前記スライダの速度検出値と前記速度指令値との偏差を演算して前記面モータに推力指令を出力する速度制御手段とを具備するリニアアクチュエータにおいて、
前記位置検出値の現在値及び過去にサンプルした位置検出値に基づいて、1サンプル後の前記速度検出値を予測演算する速度予測手段を備える。
(もっと読む)
小型高精度位置決め機構、その制御方法及びそれを用いた高エネルギー粒子発生装置
【課題】従来のものと比較してより小型で、かつバックラッシによる誤差を防止して位置決め対象を正確に位置決めすることができる小型高精度位置決め機構、その制御方法及びそれを用いた高エネルギー粒子発生装置を提供する。
【解決手段】
制御部270は、直流モータ(DCモータ210)に対して前方の所定の停止位置に向かって位置決め対象を前進させる際には、位置決め対象を初期位置から停止位置を超えて前進させた後、後退させて位置決め対象が停止位置に達するまで直流モータを回転させる一方、直流モータ(DCモータ210)に対して後方の停止位置に向かって位置決め対象を後退させる際には、位置決め対象が停止位置に達するまで直流モータを回転させるように制御する。
(もっと読む)
サーボ制御装置、方法及びプログラム、並びにインクジェット記録装置
【課題】オーバシュート現象の発生を抑えるとともに、CPU負荷を低減したサーボ制御装置、方法及びプログラムを提供する。
【解決手段】プリンタヘッド404と、これを駆動するDCモータ6004と、プリンタヘッド404の位置及びを速度を検出する検出手段と、プリンタヘッド404を駆動する速度の目標値である目標速度プロファイルを生成し、DCモータ6004による駆動力の指示値である駆動出力値を演算するCPU401とを有し、駆動出力値をデジタル演算によって特定の制御周期で離散的に演算して、少なくとも被駆動体の速度を速度目標値に近づけるように制御するサーボ制御装置であって、デジタル演算を行う制御周期が可変である。
(もっと読む)
位置制御装置
【課題】非線形ばね特性をモデル化し、最適なパラメータを事前に把握することを可能とし、そのため簡単な調整作業によって高精度な位置制御を行うことが可能な位置制御装置を提供する。
【解決手段】転がりガイド5によってガイドされるステージ4の位置制御を行う位置制御装置である。ステージ4の速度に基づき転がりガイドの非線形ばね特性から求めた摩擦力によって、制御系におけるステージの推力を補正する。指令位置と実際位置との位置偏差に基づいてステージの位置制御を行うフィードバック制御系を有し、この制御系に転がりガイド5の摩擦力をフィードフォワードゲインとして組み込む。転がりガイド5の非線形ばね特性はブラシモデルを用いて構成する。
(もっと読む)
ステージ機構、及びそれを備えた電子顕微鏡、並びにステージ機構の位置決め制御方法
【課題】低振動でドリフトが小さく高精度の位置決めを行える電子顕微鏡用ステージ機構を実現する。
【解決手段】ステージの駆動機構に超音波モータを用いるとともに、停止剛性を高める固定機構をモータと一体化する。すなわち、与圧機構に超音波モータと共に固定機構のピエゾ素子をマウントする構造を用い、ステージの加速減速及び位置決めを駆動機構で行った後、固定機構によりステージを固定する際、ステージの両側に位置するピエゾ素子が伸長し、ステージを押圧するように構成する。
(もっと読む)
1 - 20 / 36
[ Back to top ]