
Fターム[5H303DD03]の内容
位置、方向の制御 (6,897) | アクチュエータ、伝動手段、機械要素 (843) | 電動機 (562) | ステッピングモータ (21)
Fターム[5H303DD03]に分類される特許
1 - 20 / 21
ステージ移動装置及び無接点充電器
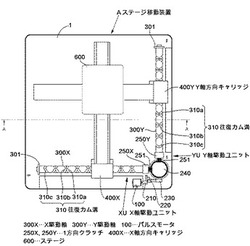
【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
位置決め装置

【課題】位置決め対象物を一台の駆動装置により互いに直交する二方向、例えば、水平方向と垂直方向とのそれぞれに移動させて位置決めすることができる位置決め装置を提供すること。
【解決手段】基台11に設けられたレール12の上にそれぞれ摺動可能に立設された第1のスライド部材21と第2のスライド部材22、但し、第1のスライド部材には、レールとの係合により第1のスライド部材を一時的に固定することのできる第1の仮固定機構31が設けられており、また第2のスライド部材には、斜面22cが設けられている;第1のスライド部材の側面21bと第2のスライド部材の斜面22cとにより摺動可能に係合支持された楔状の位置決め対象物支持部材23、但し、対象物支持部材23には、上記係合支持を一時的に固定することのできる第2の仮固定機構32が設けられている;そして、第2のスライド部材のレール上での摺動を駆動する駆動部材41を含む位置決め装置。
(もっと読む)
制御装置および制御方法、並びにプログラム
【課題】新たなハードウェアを必要とせず、タクトタイムを変化させることなく、振動を抑制する。
【解決手段】パラメータ生成部102は、基準距離について、予め定めた移動時間毎に、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを生成する。データベース103は、パラメータ生成部102から供給されたパラメータを記憶する。パラメータ決定部104は、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを決定する。軌道計算部105は、決定されたパラメータから軌道を計算する。本発明は、ロボットを制御する制御装置に適用できる。
(もっと読む)
電動アクチュエータ
【課題】制御手段に位置データを送信する際に、外来ノイズの影響を受けにくい電動アクチュエータを提供する。
【解決手段】ロッド24と一体となって収容孔13内を摺動する移動体はマグネット28を保持している。ボディ12に形成された取付溝12aには、第1の位置検出装置29および第2の位置検出装置30が取り付けられている。各停止位置検出装置29,30は、マグネット28を検出していないとき、Lレベルの信号を制御コントローラ40に出力している。一方、ロッド24と移動体が収容孔13内を移動し、各停止位置検出装置29,30がマグネット28を検出すると、Hレベルの信号を制御コントローラ40に出力する。
(もっと読む)
プローブユニット相対的平行度調整装置、プローブユニット相対的平行度調整方法、プローブユニット相対的平行度調整プログラム、プローブユニット及びパネル搬送部材
【課題】 帯状電極が短手方向に並設されているパネル部材に対し、各帯状電極と接触するプローブを設けたプローブユニットが相対的に平行であることの確認・調整を短時間で実行できる装置を提供する。
【解決手段】 本発明の装置は、パネル部材に対するプローブユニットの相対的平行度を調整する傾き調整機構と、プローブユニット及びパネル部材間の距離を検出する複数のセンサと、プローブ及び帯状電極が相対的に接近して接触する前後の各センサからの出力を取り込むセンサ出力取込手段と、取り込んだ各センサの出力に基づいて、プローブユニットの平行度調整において参照する情報を形成する調整参照情報形成手段とを備えたことを特徴とする。
(もっと読む)
情報処理装置、位置制御方法、プログラムおよび記録媒体
【課題】 ポインティング・デバイスを用いて、顕微鏡システムにおけるステージなどの操作対象を位置制御する情報処理装置、位置制御方法、プログラムおよび記録媒体を提供すること。
【解決手段】 本発明の情報処理装置110は、ポインティング・デバイス114により指し示される操作画面上の座標値を取得する手段172と、この座標値から操作対象の位置の目標値を算出する手段174と、操作対象の位置の目標値と現在値との差分を算出する手段176と、座標値の取得時間間隔内に操作対象を差分だけ移動させるために必要な速度から、予め設定された平滑化係数に応じて減速した値として、操作対象を駆動する同期モータのパルススピードの目標値を算出する手段180と、差分が有り、かつ、順方向の駆動信号が出力されている場合に、算出されたパルススピードの目標値を設定し、このパルススピードの目標値に向けた加減速制御を指令する手段184とを含む。
(もっと読む)
位置決め装置
【課題】 原点位置センサを使用せず原点位置を検出することが可能であり、また、ステッピングモータを使用した構成でありながら、脱調を起こすことなく可動部を原点位置に速やかに復帰させることが可能なようにする。
【解決手段】 位置決め装置Aは、可動部8に接触可能に設けられた原点ブロック6と、原点ブロック6に対する可動部8の接触時の衝撃を吸収してステッピングモータ2の脱調を回避するショックアブゾーバ7と、同モータ2の脱調の兆候を検出して脱調兆候信号として出力する脱調兆候検出器1と、入力位置指令aに従ってモータ2の駆動を制御するコントローラ5とを備えている。コントローラ5は、原点復帰時には同モータ2を原点復帰方向に駆動させ、その後、脱調兆候信号bがモータ2の脱調兆候を示したときは同モータ2を逆転又は正転方向に駆動させ、この状態で励磁原点信号cがアクティブとなった時点で同モータ2の駆動を停止させる。
(もっと読む)
駆動制御装置
【課題】運動伝達機構の経年劣化等を原因として、運動伝達率の値が変動した場合には、実際の運動伝達率に合わせて設定パラメータの値を変更することができると共に、設備の更新や部品交換等により、運動伝達機構が当初の運動伝達率を回復した場合には、直ちに、設定パラメータの値を初期状態へと簡単に復帰させる。
【解決手段】メモリの設定パラメータ格納領域には、運動伝達機構の初期状態及び経年状態に対応する運動伝達率に対応する単位変換比率の生成に必要な設定パラメータを格納するための第1及び第2の設定パラメータ格納領域が設けられ、それらの領域に格納された設定パラメータを参照することにより、所定の単位変換演算式にしたがって、標準単位系から駆動単位系へと単位変換を行う。
(もっと読む)
搬送制御装置、搬送装置の制御方法、及び観察装置
【課題】駆動機構の搬送量誤差と原点センサーの位置検出誤差を個別に加味した制御動作を実行する搬送制御装置を提供する。
【解決手段】本発明に係る搬送制御装置は、往復移動体を駆動する駆動機構と、原点センサー5と、駆動機構2の駆動量を検出する駆動量検出手段と、往復移動体が静止状態から移動状態に移行した時点を光学的に検知する移動検知手段とを具え、原点センサー5が第1出力状態から第2出力状態となるまで往復移動体を一方向に移動させた後、原点センサー5が第2出力状態から第1出力状態となるまで往復移動体を逆方向に移動させ、原点センサー5が第2出力状態となった後に往復移動体が静止状態から移動状態へ移行するまでの第1の駆動量と、往復移動体が移動状態へ移行した後に原点センサーが第1出力状態となるまでの第2の駆動量とを取得する。
(もっと読む)
ステージ位置決め装置
【課題】
ステージを目標位置に高精度に位置決めを行い、かつ位置決め終了時の残留振動を低減することが可能なステージ位置決め装置を提供する。
【解決手段】
モータ駆動手段からステージの位置を出力するレーザ測長計までを、速度指令入力から位置を出力する一つの制御対象としてみなし、この制御対象に速度指令を入力し、制御対象の周波数特性を取得する。得られた周波数特性から、ステージの固有周波数および除去したい周波数帯域を決定し、速度指令フィルタを設定する。通常時のステージ駆動は、ステージの現在位置と目標位置指令の差分を用いて、制御部により第1の速度指令を算出する。第1の速度指令を速度指令フィルタに通すことで、特定の周波数帯域を除去した第2の速度指令を算出する。この制御対象に第2の速度指令を入力する。
(もっと読む)
テーブル位置決め装置
【課題】高精度位置決めを迅速かつ安定して行なえるようにする。
【解決手段】 ボールねじ軸(リード1mm)を利用した全域回転駆動型でかつテーブルを最小1nmずつ移動可能で、3つの光学格子(明・暗線が2μm)を用い信号分割数を2000として1nm/1パルスの移動変位量検出信号を生成でき、オープンループ制御による高速回転とクローズドループ制御による中速回転および低速回転をこの順序で切換えて位置決めでき、低速回転中にインポジション範囲内であることを確認して迅速停止可能に形成されている。
(もっと読む)
ステージ位置決め装置
【課題】ステージを目標位置に高精度かつ高速に移動し、停止することが可能なステージ位置決め装置を提供する。
【解決手段】移動開始位置においてステージ位置検出装置によりステージの現在位置と目標位置から目標移動量R1を算出し、目標移動量と実移動量の関係を表す移動量誤差情報に基づき、前記ステージの実移動量Y1が前記目標移動量R1に一致するような補正目標移動量R2を算出する。前記補正目標移動量R2で前記ステージを駆動することで、前記ステージをR1だけ移動させることにより、高精度かつ高速な位置決めを行う。
(もっと読む)
XYステージ
【課題】 バーミラーが大きく撓んでいる場合には、それを検出して、異常として操作者に通知することで、異常時の早期発見と異常個所(バーミラー)の特定を実現する。
【解決手段】 プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダ又は前記プラテンの一辺近傍に配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計と、前記スライダの原点を検出する原点センサとを具備するXYステージにおいて、
前記スライダを前記一辺と平行をなす方向に移動制御したときの、前記原点センサの距離測定値の変化量を検出する変化検出手段と、
前記変化量が所定の閾値を超えたときに警報を発生する警報手段と、
を備える。
(もっと読む)
平面位置決め装置
【課題】 エアの供給を切ることなく歯合わせ動作を行なうことができ、ズレを電気的な演算により検出可能とした平面位置決め装置を実現する。
【解決手段】 プラテン上面をX軸方向及びY軸方向にスライドするスライダの位置検出値と位置指令の誤差を増幅する誤差増幅器と、この誤差増幅器よりモータ位置に同期し推力が極大となる位相の交流電流指令を与えるサーボモータモードの電流振幅指令を入力し、前記スライダに搭載されたモータに励磁電流を供給するするドライバ手段と、前記スライダを初期位置に規制する初期化手段とを有する平面位置決め装置において、
前記初期化手段は、
推力が極小となるように指令を与える、可変できるパルスモータモードの交流電流指令を前記ドライバ手段の入力に重畳させる可変電圧発生手段と、
前記パルスモータモードの交流電流指令を所定値よりゼロまで低下させると共に、前記誤差増幅器のゲインをゼロより所定値まで増加させる操作を連動して実行するゲイン変更手段と、
を備える。
(もっと読む)
機械部品の位置をトリガする方法および装置
【課題】ワークピースに対して迅速にかつ高位置精度で相対移動される機械部品をトリガする方法および装置を提供する。
【解決手段】ワークピース22に対して一つの移動軸18に沿って相対移動されるレーザ装置12を位置を正確にトリガする方法において、位置パルス32は、増分エンコーダ28を用いて発生され、位置パルス列30における位置パルス32の数は、レーザ装置12の移動位置を表す。レーザ装置12に対するトリガ信号54は、現在の位置パルス数が、規定されたパルス数に対応する場合に発生される。現在の位置パルス数および規定されたパルス数は、インタフェースカード48上の比較器において比較される。
(もっと読む)
回転機構付軸方向微動機構および粗微動位置決め装置
【課題】高精度で高い応答性の微動動作が可能であるとともに圧電アクチュエータの破損を防止することができる回転機構付軸方向微動機構を提供する。
【解決手段】回転機構付軸方向微動機構は、対向配置して予圧を付与した2つの転がり軸受装置と、基台に固定され、転がり軸受装置のそれぞれの外輪が嵌合するハウジングと、伸縮方向に対して並列に配置した2つの圧電アクチュエータとを有する。そして、転がり軸受装置のそれぞれの内輪をねじ軸に嵌合させ、内輪をねじ軸に軸方向に固定し、外輪の一方を軸方向に拘束し、圧電アクチュエータと外輪の他方との間に、外輪の他方を押圧するピストンと、ピストンに当接する軸方向の断面形状が円弧状となる間座とを設け、外輪間の軸方向の距離を複数の圧電アクチュエータの伸縮により変化させるようにした。
(もっと読む)
XYステージ
【課題】 原点復帰時のスライダ部同士の衝突を防止し、レーザ干渉計のつなぎ箇所にて発生する累積検出誤差をキャンセルする機能を備えたXYステージを実現する。
【解決手段】 四辺形のプラテン上で2個のスライダ部を夫々2次元方向に位置制御するにXYステージにおいて、
前記四辺形の対角点位置又は一辺の両端位置に、前記スライダ部の夫々に対応する原点位置検出手段を設けた。
(もっと読む)
XYステージ装置
【課題】 プラテンに変形が生じていても、ステージの動作への悪影響を小さくすることができるXYステージ装置を提供する。
【解決手段】 XYステージ装置1の制御系は、PID制御要素13、力・位相シフト変換要素14、位相・電流変換要素15、電流・推力変換要素16およびステージ可動体動力学要素17が閉ループを構成している。加えてXYステージ装置1の制御系は、位置(角度)指令からプラテン補正量を算出するプラテンスケーリング要素18と、プラテン補正量と検出したステージ可動体位置(角度)とから補償量に対応した位相を算出する位置・位相変換要素19を備えている。これにより、プラテンに変形が生じていても、ステージの動作への悪影響を小さくすることができる。
(もっと読む)
リニアパルスモータの制御方法
【課題】 プラテンの軌道面に沿ってX軸方向およびY軸方向に駆動される一群のフォーサを介してステージを所望位置まで高速度で円滑に駆動できるリニアパルスモータの制御方法を提供する。
【解決手段】 プラテン4のXY平面上の所望位置に一群のフォーサ5X1,5X2,5Y1,5Y2を介してステージ3を駆動する際、ステージ3の瞬時目標位置と速度フィードフォワード出力値と加速度フィードフォワード出力値との合算値によりフォーサをフィードフォワード制御するため、フォーサは、その瞬時目標位置に対し遅れを発生することなく、しかも振動を発生することなく円滑に駆動される。その結果、ステージは、所望位置まで高速度で円滑に駆動される。
(もっと読む)
リニアパルスモータの制御方法
【課題】 プラテンの軌道面に沿ってX軸方向およびY軸方向に駆動される一群のフォーサを介してステージを所望位置に高精度で位置決めでき、かつ、迅速に整定できるリニアパルスモータの制御方法を提供する。
【解決手段】 プラテン4のXY平面上の所望位置に一群のフォーサ5X1,5X2,5Y1,5Y2を介してステージ3を駆動する際、フォーサ5X1,5X2,5Y1,5Y2のオープンループ制御によりステージ3は所望位置まで迅速に駆動され、フォーサ5X1,5X2,5Y1,5Y2のクローズドループ制御によりステージ3は所望位置に高精度に整定される。
(もっと読む)
1 - 20 / 21
[ Back to top ]