
Fターム[5H303EE03]の内容
位置、方向の制御 (6,897) | 位置の設定内容、設定方法、設定手段 (374) | 位置設定値が変化するもの (232)
Fターム[5H303EE03]に分類される特許
201 - 220 / 232
同期制御装置
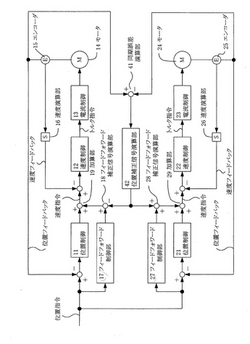
【課題】 2軸間の位置及び速度の同期誤差を最小にするように制御する同期制御において、1軸目、2軸目どちらに外乱が与えられた場合でも、また、2軸間で摩擦の大きさが大きく異なるような場合でも、2軸を同期させることができるとともに、定常状態においても過渡状態においても、また、速度フィードバックだけでなく位置フィードバックも同期させることができるようにする。
【解決手段】 各軸について位置フィードバックによる位置制御手段を備えた同期制御装置において、位置指令に基づいて各軸のフィードフォワード信号を作成するフィードフォワード制御部と、2軸間の位置フィードバックの差から同期誤差を求める同期誤差演算部と、求められた同期誤差から位置補正信号を求める位置補正信号演算部と、各軸のフィードフォワード信号と位置補正信号から各軸のフィードフォワード補正信号を求めるフィードフォワード補正信号演算部と、フィードフォワード補正信号を速度指令に加える加算部と、を備える。
(もっと読む)
同期制御装置

【課題】 機械にショックを与えることなく、緩やかに同期倍率の変更を行う。また、同期倍率変更の緩やかさを設定できるようにする。
【解決手段】 同期倍率変更前後のブロック間に同期倍率を緩やかに変更するブロックを追加する。該ブロックで指定されている、同期倍率変更前後の同期倍率a、b、マスタ軸の移動量p、スレーブ軸の移動量q及び同期倍率変更が完了してからのマスタ軸の残移動量v(又は、当該ブロックの移動開始から同期倍率変更開始位置までのマスタ軸の移動量u)を読み出す。これらのデータより同期倍率変更の傾き、及び、移動量u(残移動量v)を求める。移動量u、残移動量v、同期倍率変更の傾きに基づいて、スレーブ軸を制御する。同期倍率が緩やかに変更されるから、機械にショックを与えることはない。又、この同期倍率の傾きは、指定データp,q,v(又はu)によって決めることができる。
(もっと読む)
ディスクドライブのトラック探索モードでの適応的載置制御方法及び装置
【課題】ディスクドライブのトラック探索制御時に探索距離に関係なく向上された載置制御を実行させる載置制御方法及び装置を提供する。
【解決手段】ディスクドライブのトラック探索モード制御方法であって、トラック探索モードの加減速制御モードから載置制御モードへ遷移される時点のヘッド動きの初期状態をシステムの固有ベクトル線上に遷移させて、固有ベクトルに沿ってヘッドを目標位置及び速度値に収斂するように制御することを特徴とするディスクドライブのトラック探索モードでの適応的載置制御方法。
(もっと読む)
立体形状再生装置および立体形状記録再生装置
【課題】移動物体に対しても適用可能であり、精度の高い立体形状を簡易かつ迅速に再生し、さらには立体形状を測定し、再生することができること。
【解決手段】三角形の各辺上に配置され、電気的変位量を機械的変位量に変換する駆動素子と、各駆動素子に電気的変位量を与えて各駆動素子を機械的に変位させる駆動制御を行う制御手段とを備え、立体形状を簡易かつ迅速に再生する。また、三角形の各辺上に配置され、機械的変位量を電気的変位量に変換する検出素子を併用して、立体形状を測定し、再生する。
(もっと読む)
制御装置
【課題】 機械の経年変化による強度低下により保守必要性や、動作異常等を検出する制御装置を得る。
【解決手段】 サーボモータで駆動される被駆動体に加速度検出手段と取り付ける。サーボモータの位置、速度のフィードバック制御を行う軸制御回路のプロセッサは、位置、速度制御処理周期毎、位置、速度フィードバック制御処理を行い電流指令を求め電流ループ処理に出力する(a1〜a6)。また、加速度検出手段より加速度検出値αfを読み取り(a7)、該加速度検出値αfがスレショルド値αs以上のとき(a8)、異常信号を出力し、アラーム表示、機械動作停止等を行う。被駆動体の加速度を加速度検出手段で直接検出するから、機械が古くなり振動が多くなったとき、被駆動体が他の物と衝突したとき、部品の破損等の機械異常が発生したときなど、異常を確実に検出できる。
(もっと読む)
回転軸の制御装置
【課題】 回転体と検出器との間に剛性の低い部分が存在することによる振動を抑制または防止する。
【解決手段】 回転体10の回転角加速度を検出する角加速度センサ16を設け、角度/角速度指令値を角加速度の値に従って補正(18)する。
(もっと読む)
駆動制御装置
【課題】 加速度センサの動作及び取付け方向についての異常の有無を判定することができる駆動制御装置を提供する。
【解決手段】 駆動装置10を介して被駆動体12の動作を制御する駆動制御装置が、被駆動体の位置又は速度を検出する位置又は速度検出手段20,22と、被駆動体に取り付けられ、位置又は速度検出手段とは別に被駆動体の加速度を検出する加速度検出手段26とに加えて、加速度検出手段からの加速度情報に基づいて加速度検出手段の動作又は被駆動体への取付けについての異常の有無を判定する判定手段130を具備するように構成される。判定手段からの判定情報が異常を示すときには、加速度検出手段からの加速度情報を使用することなく、位置又は速度検出手段からの位置又は速度に基づいて、被駆動体の動作を制御する。
(もっと読む)
サーボモータ制御装置
【課題】両モータの停止時相対回転位置のずれ量を短時間に補正することができるサーボモータ制御装置を提供する。
【解決手段】被加工物を動作制御する2個のサーボモータの駆動中に両モータへの電力の供給が突然遮断され両モータのブレーキ機構の制動差によって両モータの停止時の回転位置にずれが発生したときにこのずれを補正する手段を有するサーボモータ制御装置において、両モータへの電力の供給が再開されたときは両モータの停止時回転位置を検出する検出手段と、検出された両モータの停止時回転位置に基づいて両モータの停止時回転位置間の差である停止時相対回転位置を算出しこの停止時相対回転位置と予め定められた初期設定相対回転位置とのずれ量を算出するずれ量算出手段と、ずれ量が零になるように両モータのいずれか一方又は両方を自動的に回転駆動させる補正駆動手段とを備えている。
(もっと読む)
サーボ制御装置および方法
【課題】 時間や温度ともに変化する摩擦力をより正確に求め、時間や温度の変化に依存することなく常に位置制御や柔軟制御の制御性能を高く維持することができるようにする。
【解決手段】 実制御と同一構成のシミュレーション位置制御器15およびシミュレーション速度制御器16と、制御対象を模擬したメカモデル演算部18と、実制御とシミュレーションを比較する比較部19と、比較部19の出力から摩擦モデルを生成する摩擦モデル生成部20と、摩擦モデル生成部20の出力に基づいた摩擦補償値を補償する補償部21とを備える。
(もっと読む)
基板位置決め装置
【課題】 2ヘッドレーザ加工機における2個の加工ヘッドの光軸の位置ずれや傾斜による加工不良を低減化できる基板位置決め装置を提供する。
【解決手段】 基板が載置されるテーブル33およびこのテーブルを保持するテーブル保持台34と、基板の直交する2辺に当接して基板の位置決めをおこなうX軸方向ストッパ37およびY軸方向ストッパ36と、テーブル保持台34に対するX軸方向ストッパ37のX軸方向位置を、所定の基準位置とオフセット位置とに切換えるX軸方向ストッパ位置切換装置47と、テーブル保持台34に対するY軸方向ストッパ36のY軸方向位置を、所定の基準位置とオフセット位置とに切換えるY軸方向ストッパ位置切換装置41と、テーブル33をX軸およびY軸に斜交する斜行方向に水平移動させて基板をX軸方向ストッパ37およびY軸方向ストッパ36に当接させるテーブル駆動装置50とを具備した。
(もっと読む)
サーボシステムの異常検出装置
【課題】通常動作でも誤検出することなく、制御対象が暴走により移動範囲外に移動するのを未然に検出できるサーボシステムの異常検出装置を提供する。
【解決手段】上位機器12から入力される位置指令パルスとサーボモータ2に設けられた位置検出手段3により出力されたフィードバックパルスから制御演算手段10により制御量を決定し、モータ駆動手段11によりサーボモータ2の回転量を制御するサーボシステムにおいて、位置指令パルスの正方向または負方向の積算値と許容パルスPから移動量を演算する最大移動量演算手段6と、フィードバックパルスの積算値を演算する積算値演算手段7と、最大移動量とフィードバックパルスの積算値とを比較する比較手段8と、比較手段8の結果により制御対象の暴走を検出する異常検出手段9とを備え、最大移動量演算手段6は移動量の最大値を更新保持する。
(もっと読む)
モータ制御装置
【課題】位置制御とトルク制御を切替えてモータを制御する場合に、簡単な構成で制御モード切替が実現できるモータ制御装置を提供する。
【解決手段】位置指令Pとモータ現在位置Pmの差分から速度指令ωを生成する位置制御手段と、速度指令ωとモータ現在速度ωmの差分から第一トルク指令T1を生成する速度制御手段と、位置指令Pに変換定数をかけて第二トルク指令T2を生成するトルク指令変換手段3と、生成した第一トルク指令T1と第二トルク指令T2の出力が入力される制御モード切替手段4とを備え、位置指令Pからモータ位置を制御するための第一トルク指令T1とモータトルクを制御するための第二トルク指令T2を生成する。
(もっと読む)
リニアアクチュエータ
【課題】 一対のリニアモータのスライダ間をアーム部材で結合するリニアモータで発生する各モータ間の位置誤差を補正して高精度の位置決め制御を可能とするリニアアクチュエータを実現する。
【解決手段】 位置検出手段を備えた一対のリニアモータのステータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力の和に基づき前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記一対の位置検出手段の出力の差に基づき前記スライダ間の位置誤差信号を算出する位置誤差検出手段と、
前記中点位置信号と目標位置信号との偏差に基づく推力指令によりドライバを介して前記リニアモータのスライダを駆動する中点位置制御手段と、
前記位置誤差信号を演算した補正信号を前記推力指令に差動的に重畳させる姿勢制御手段と、
を備える。
(もっと読む)
ステージ駆動装置
【課題】ステージを精度よく移動させることができるステージ駆動装置を提供する。
【解決手段】ステージを移動させるモータと、モータを駆動する駆動回路を有するドライブ装置と、ドライブ装置を制御するコントロール装置を備えたステージ駆動装置において、ドライブ装置が駆動回路に送出する電流指令PIのゲインを、コントロール装置が送出する切替信号CCにより検査区間以外は電流指令PIを高ゲインで増幅してステージの移動を高速度にし、検査区間は低ゲインで増幅してステージの移動を低速度に切替える。
(もっと読む)
負荷のアンバランス補正方法
【課題】本発明は、制御対象のアンバランス分をキャンセルするためのアンバランスオフセットをトルク指令に加算して制御対象の応答性を向上させることを目的とする。
【解決手段】本発明による負荷のアンバランス補正方法は、制御対象(1)のアクチュエータ(50)を制御する際に、制御対象(1)がアンバランスを生じている場合、トルク指令(Tcmd)に対してアンバランス分をキャンセルするための予め設定されたアンバランスオフセット(KF)を加算する方法である。
(もっと読む)
位置決め制御装置
【課題】 位置制御時の速度超過やオーバーシュートを抑制しつつ位置決め時間を短縮でき、制御応答が低い場合においても安定した制御ができる位置決め制御装置を得る。
【解決手段】 サーボ制御に理想的なモデルトルク、モデル速度、モデル位置を出力するモデル演算部1と、モデル位置と実位置との位置偏差に対して位置制御ゲインを掛けて速度指令を演算する位置比例補償手段3aと、この速度指令およびモデル速度と実速度の偏差に対してフィードバックトルク指令を出力する速度比例積分補償手段5,6,7と、このフィードバックトルク指令にモデルトルクを加算した加算値を予め設定されたトルク制限値で制限してモータを駆動するトルク指令として出力するトルク制限手段9と、を備え、位置比例補償手段3aは、動作中にモデル速度の多項式に基づいて位置制御ゲインを連続的に変化させる。
(もっと読む)
駆動装置
【課題】 アクチュエータを構成する駆動コイルを滑らかに動作させることが出来る駆動装置を提供することを目的としている。
【解決手段】 ステップST13で、動作速度定数の累積値ΣΔTを所定値Sで割っているため、ΣΔT/Sが自然数でない有理数や無理数を取ることも可能になる。その結果、本発明では、従来では得られなかった移動速度を得ることが可能になる。所定値Sや移動速度定数ΔTを違う値に設定すれば、また違った移動速度を得ることができ、従来に比べて細かく移動速度の設定を行なうことが可能になる。
(もっと読む)
サーボ制御装置およびサーボ制御方法
【課題】指令の遅れがなく負荷の機械振動、あるいは負荷の制御振動を抑えることができるサーボ制御装置およびサーボ制御方法を提供する。
【解決手段】サーボ制御装置は、時間で変化する関数であり、負荷にあわせた、すなわち負荷の機械振動、あるいは負荷の制御振動を抑える関数である指令関数xを用いて、指令の速度や移動量に応じて、ある時間ごとの位置指令の差分又は速度指令を作成するための指令関数作成手段12を有し、指令関数作成手段12は加減速プロファイルを作成する時に指令関数xを用いて行い、加速時間以内で加速、指令速度以上で指令速度とし、移動量の残りが減速距離以下で減速とする指令を算出する。
(もっと読む)
バルブポジショナ,バルブ駆動装置
【課題】 バルブの動作角度に応じて,前記制御感度を自動で適切に調節することが可能なバルブポジショナ,及びバルブ駆動装置を提供することにある。
【解決手段】
バルブの目標角度に対する検出角度の偏差に基づいてバルブ駆動用アクチュエータを制御する場合に,バルブの検出角度(実際の動作角度)に基づいて,バルブ駆動用アクチュエータの制御感度を調節することを特徴とするバルブポジショナとして構成される。
具体的には,A/D変換器2bからのデジタル信号(検出信号)が変化した場合,動作感度算出回路9が記憶部8に記憶されている動作感度テーブルを参照し,バルブの検出角度に応じて判断回路3における不感帯の幅を設定する。
(もっと読む)
制御装置、搬送制御装置、搬送システム及び画像形成システム
【課題】 駆動対象に大きな負荷が生じている場合であっても、高精度に駆動対象を所定の移動量、移動させることが可能な技術を提供すること。
【解決手段】 制御部は、駆動回路に操作量uに応じた目標電流指令を入力することによりモータを制御し、これにより搬送ローラ及び排紙ローラの回転を制御し、搬送ローラ及び排紙ローラ等から構成される搬送部に、用紙Pを搬送路の下流側へと搬送させる。この際、制御部は、操作量uが上限値未満であると、目標位置演算部601及びフィードフォワード制御部603を動作させる。一方、操作量uが上限値以上であると、目標位置演算部601及びフィードフォワード制御部603の動作を停止する。そして、動作停止前に、目標位置演算部601にて設定された目標位置xと、実位置を表す位置カウンタ57のカウント値yとに基づき、偏差Θを算出し、これに基づき操作量uを算出する。
(もっと読む)
201 - 220 / 232
[ Back to top ]