
Fターム[5H303EE03]の内容
位置、方向の制御 (6,897) | 位置の設定内容、設定方法、設定手段 (374) | 位置設定値が変化するもの (232)
Fターム[5H303EE03]に分類される特許
81 - 100 / 232
サーボ調整方法および装置

【課題】機械の条件が変動しても、フィードバック制御系の安定を確保することができるするサーボ調整方法を提供する。
【解決手段】複数の異なる条件の下で、それぞれ前記フィードバック制御系の周波数伝達関数を表すゲイン、位相の周波数特性を測定し、各条件の周波数特性の測定結果に基づいて、各周波数におけるゲインの最大値と、位相の最小値とを求め、各周波数におけるゲインの最大値からゲインの最大抱絡線と、位相の最小値から位相の最小抱絡線を求め、ゲインの最大抱絡線、位相の最小抱絡線を基準にして、ゲインの調整を行う。
(もっと読む)
操作方法および操作装置

【課題】動作範囲が異なるジョイスティックとモバイルロボットとの間で力覚フィードバックを得ながらの操作を可能とする。
【解決手段】動作範囲が異なるジョイスティック10とモバイルロボット11とを用い、ジョイスティック10によりモバイルロボット11を操作する。モバイルロボット11の移動中に、当該モバイルロボット11が受ける時系列な力の触覚情報を取得し、取得した前記触覚情報を時間領域で解析処理し、解析処理結果からの接触情報をジョイスティック10にフィードバックするから、力覚フィードバックを得ながら操作を行うことができ、動作範囲の異なるジョイスティック10とモバイルロボット11との間で、直感的な操作が可能となる。
(もっと読む)
運動指令生成装置
【課題】複雑な動作条件を満足する運動指令値をリアルタイムで計算できる指令値生成装置を得るものである。
【解決手段】制御対象の動作条件が入力される入力部と、時間の関数である基本関数と前記基本関数毎に未知の重み係数を乗じて足し合わせた重み付き線形和によって運動指令値を表した線形和情報を作成し、前記動作条件に応じて前記重み係数を含む最適化変数に対する線形の等式及び不等式によって制約条件及び評価指標を表した線形計画問題を作成して線形計画問題情報として記憶する線形計画問題設定部と、前記線形計画問題情報が表す前記線形計画問題を解くことによって、前記重み係数を求める重み係数算出部と、前記線形和情報に基づき前記基本関数に前記重み係数算出部で求めた重み係数を乗じて足し合わせた重み付き線形和によって前記運動指令値を算出する指令値算出部とを備えた。
(もっと読む)
サーボ装置
【課題】サーボ装置で駆動される模型飛行機の引込み脚を、停止位置に保持電流を消費せずに維持できるようにする。
【解決手段】サーボ装置10は、出力軸の目標位置信号と、サーボモータ16から得られる出力軸の現在位置信号等との誤差を増幅手段21で増幅し、PWM 波形としてモータに与え、誤差が小さくなる方向にモータを駆動する。不感帯設定手段23は、誤差がフィードバック制御によって修正すべき大きさか否かを判断する基準値を設定する。モータ停止と判断された場合、不感帯は通常の0.4 °から10°に変更される。モータが停止すると外力が加わってもサーボ装置には停止位置で外力に対する保持電流は流れず、電力の無駄な消費が抑えられる。
(もっと読む)
情報処理装置および方法、プログラム、並びに記録再生装置
【課題】制御対象の角度又は位置を目標値へ向けて動作制御する制御系の制御パラメータの適切な値を、より容易に求めることができるようにする。
【解決手段】制御パラメータ生成部124は、開ループ周波数特性におけるゼロクロス周波数fxから位相進み遅れフィルタの制御パラメータの暫定値を決定し、開ループ周波数特性に基づき、ゼロクロス周波数が目標とするfxに一致するよう制御器ゲインKpを設定し、ユーザに、条件安定のゲイン余裕が12dBとなるように低域ブースタのゲインを決定させ、さらに、位相余裕が32°以上となるよう位相遅れ周波数を変更させて全体の微調整を行わせる。本発明は、例えば、記録再生装置に適用することができる。
(もっと読む)
位置決め制御システム
【課題】従来のビルの清掃作業手法に比べ、清掃用ゴンドラを上下駆動できる装置を簡単に設置することができ、しかも、作業が終了すれば簡単に撤去することができ、さらに、清掃用作業員が効率的に清掃作業を行うことができ、そして、安全で、安価に提供できる位置決め制御システムを提供することを目的としている。
【解決手段】位置決め制御システムは、夫々モータ3で回転駆動される複数のプーリー6と、該各プーリー6に夫々巻回されてなる索体7と、該各プーリー6に巻回されてなる少なくとも2本の索体7を使用して上方向に支持されてなる作業装置12と、前記各モータ3の回転駆動を夫々制御するモータ制御装置2と、前記各モータ制御装置2に前記モータ3の回転駆動量を指令する制御装置1とからなるものとしている。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】A/D変換の精度をデバイスの分解能以上に高め、位置決めの精度を向上させる。
【解決手段】ステージの位置決め制御をする位置決め制御ユニット120であって、1制御周期あたりの操作量を算出する操作量算出部121と、ステージ140の駆動のために、算出された操作量を出力する出力部126と、センサ150により1制御周期あたり複数回検出されたステージ140の検出位置の、1制御周期にわたる平均値を現在位置として算出する現在位置算出部129と、を備える。これにより、検出の分解能をデバイスの分解能以上に高くして、位置決めの精度を向上させることができる。たとえば、位置換算値1nmの分解能のA/D変換部127を用いて0.1nm単位の位置検出を行うことができる。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】D/A変換の精度をデバイスの分解能以上に高め、位置決めの精度を向上させる。
【解決手段】ステージの位置決めを制御する位置決め制御ユニット120であって、1制御周期あたりの操作量を算出する操作量算出部121と、算出された操作量を、1制御周期の積分値が等しくなるように、時間的に分割して所定分解能で出力する出力制御部123と、出力された操作量をデジタル信号からアナログ信号へ所定分解能で変換するD/A変換部124と、を備え、アナログ信号により圧電素子を駆動させることで、ステージの位置決めを制御する。これにより、D/A変換の精度をデバイスの分解能以上に高くして、位置決めの精度を向上させることができる。
(もっと読む)
位置制御装置
【課題】一つの負荷機械を複数の電動機で駆動する場合、簡単な調整で制御系の安定性を損なうことなく複数の電動機と各々に対応した負荷機械の位置のずれを抑制する。
【解決手段】第1から第nの駆動制御回路103、203は、それぞれ位置指令信号と位置信号とに基づいて第1のトルク指令信号を演算する第1の位置制御回路104、204と、第1から第nの位置検出器102、202の出力する位置信号に基づいて第2のトルク指令信号を演算する第2の位置制御回路105、205と、第1のトルク指令信号と第2のトルク指令信号とを加算した統合トルク指令信号に一致するよう電動機のトルクを制御するトルク制御回路106、206と、第1の位置制御回路と第2の位置制御回路の制御係数を演算し、変更するゲイン演算回路107、207とを備えている。
(もっと読む)
位置決め装置
【課題】プラテンの表面や周囲に突起した部品を設けることなくスライダの領域検出を行うことができる位置決め装置を実現する。
【解決手段】スライダをプラテン上の所定領域内で移動させる位置決め装置において、
前記スライダの前記プラテンと対向する面の辺縁部に埋設され、前記プラテンへ向けてセンサ信号を発生するセンサ信号発生部と、
前記プラテンの前記所定領域の辺縁部に埋設され、前記センサ信号を検出するセンサ信号検出部と、
を備えたことを特徴とする。
(もっと読む)
アクチュエータの角度伝達誤差補償方法
【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
流体船積みおよび/または荷降ろしシステム用の直接制御、特に比例制御および/または直線的制御式装置
本発明は、海洋船積みシステム(2)用の結合器の動きと位置決めのための制御装置に関する。前記海洋船積みシステムは、ベースに固定されているライン端部を有する少なくとも1つの流体移送ラインと、目標ダクトへの接続用に適合されている結合器が設けられている可動ライン端部とを備え、前記システムは、ベースに対して少なくとも3自由度を結合器が有するように、複数の機械的接続部を更に有しており、制御装置は、それぞれが自由度においてシステムの動きを比例的に制御する少なくとも3つの比例式制御アクチュエータ(27、28、29)と、各自由度を追尾するシステムの位置センサ(30、31、32)と、結合器を動かすコマンドを入力するためのコマンド入力インタフェース(60)と、結合器の瞬間的位置を、センサから提供される情報から計算し、コマンド入力インタフェースの動きコマンド入力から、アクチュエータの組み合わされた動きが、コマンド入力インタフェースにおいてオペレータにより提供される動きコマンドに対応する結合器の動きとなるように、アクチュエータのそれぞれに与える同時制御指令を計算する計算機(41)と、を備える。 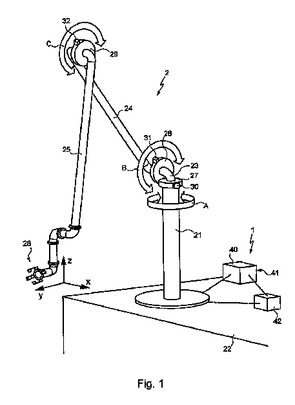 (もっと読む)
(もっと読む)
ロボットの制御方法、ロボットの制御装置及び部品実装機
【課題】ビーム上の2地点間で移動体を移動させるときの移動体の移動時間がロボットの固有周期に近接している場合であっても移動体の移動時間を本来の適切な時間に保持することができるロボットの制御方法、ロボットの制御装置及び部品実装機を提供することを目的とする。
【解決手段】X軸ビーム5b上の第1の位置に停止している移動ステージ5cをX軸ビーム5b上の第2の位置まで移動させて停止させるとき、移動ステージ5cを第1の位置から起動させて所定速度まで加速移動させる加速移動指令信号S1、移動ステージ5cを所定速度で定速移動させる定速移動指令信号S2、移動ステージ5cを所定速度から減速移動させて第2の位置に停止させる減速移動指令信号S3をこの順で出力し、加速移動指令信号S1の出力継続時間t1及び減速移動指令信号S3の出力継続時間t3をそれぞれXYロボット5の固有周期Tの25%以下とする。
(もっと読む)
位置制御装置
【課題】上位装置からの位置指令値に対してスキュー時間が存在する場合でも、外挿演算結果に制御性悪化の要因となるパルス状の乖離発生を抑制する機能を備える位置制御装置を実現する。
【解決手段】自己のサンプル周期とは異なるサンプル周期を有する上位装置から与えられる位置指令値を、外挿演算手段により自己のサンプル周期の位置指令値に変換して位置制御手段に入力する位置制御装置において、
前記外挿演算手段からの位置指令値を所定サンプル周期遅らせて前記位置制御手段に出力すると共に、現サンプル周期における前記外挿演算手段からの位置指令値の差分値が前記上位装置からの位置指令値の差分値を超える場合には、超過した差分値を所定サンプル周期前の前記外挿演算手段からの位置指令値の差分値に加算する外挿演算補正手段を備える。
(もっと読む)
サーボゲイン調整装置およびサーボゲイン調整方法
【課題】調整結果中の任意の整定時間と目標位置からの位置ずれ量の組み合わせでサーボ制御装置の制御パラメータの選択を行うことができるサーボゲイン調整装置を得ること。
【解決手段】制御パラメータ一覧情報中の制御パラメータをサーボ制御装置20に設定するパラメータ変更部35と、設定された制御パラメータでの制御対象の位置決め動作時に測定された整定時間と目標位置からの位置ずれ量とを格納する調整結果格納部36と、各制御パラメータで制御対象の位置決め動作を行った調整結果から整定時間と目標位置からの位置ずれ量について作成した散布図と、制御パラメータ一覧情報と、を含む調整画面を表示部32に表示する調整制御部37と、調整画面の散布図または制御パラメータ一覧情報中の任意の位置を選択する入力部33と、を備え、調整制御部37は、選択された位置に対応する制御パラメータを選択制御パラメータとして設定する。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
精密ステージ制御システム
【課題】 補正マップのメモリ容量の増加や補正処理時間を増加することなく、補正マップを使用した複数の位置補正処理を行うことがきる精密ステージ制御システムを提供する。
【解決手段】 上位コントローラ11と、ステージ14と、ステージ制御装置10と、電流アンプ/アクチュエータ13と、位置検出器12とで構成され、ステージ14の基準軸の位置に応じた補正量を、ステージ14の補正軸に加える位置補正機能を複数有した精密ステージ制御システムにおいて、上位コントローラ11に位置補正情報を設定記憶する複数の補正マップ121,122と、複数の補正マップ121,122を一つの合成補正マップ123に合成する補正マップ合成処理部112と、を備えた。
(もっと読む)
2軸同期駆動制御装置およびこの装置を用いたサーボプレスおよびダイクッション装置
【課題】2軸駆動制御の同期性を向上する。
【解決手段】第1、第2のサーボ駆動制御系40,50を、信号X、Yを加減算してフィードバック信号Xf、Yfを生成可能かつ指令信号S1(“2S”)、S2(“0”)からフィードバック信号Xf、Yfを減算して前段偏差E1f、E2fを求め、さらに前段偏差E1fをサーボ駆動制御系50に同期調整入力可能でかつ前段偏差E2fをサーボ駆動制御系40に同期調整入力可能に形成されている。
(もっと読む)
回転構造物の位置制御方法
【課題】精度の高い位置制御を実施することができ、より高精度な加工等の実現に寄与することができる回転構造物の位置制御方法を提供する。
【解決手段】回転構造物のねじり剛性係数Kθを用いて角度誤差Δθを算出する第1工程と、回転構造物のたわみ剛性係数Kδを用いて、角度誤差Δθの補正により生じる位置誤差δY、δZを算出する第2工程と、角度誤差Δθ及び位置誤差δY、δZを補正量として出力する第3工程とを実行するようにした。当該位置制御方法によれば、角度補正により回転軸以外の軸方向に位置誤差が生じたとしても、該位置誤差を補正することが可能となり、精度の高い位置制御を実行することができる。
(もっと読む)
スライド駆動装置
【課題】複数のスライド部が同期してスライド駆動可能なスライド駆動装置を提供する。
【解決手段】スライド駆動装置1では、可動プレート106とスライドブロック11におけるフランジ113、114との間にワイヤ131、132が張設されている。また、可動プレート106とスライドブロック12におけるフランジ123、124との間にワイヤ141、142が張設されている。ワイヤ131、132、141、142は、プーリ151〜153、161〜163などを介して張設されている。可動プレート106が一の方向に移動するとき、ワイヤ131、141およびワイヤ132、142の一方に引っ張り力が作用し、他方が送出されることにより、可動プレート106の移動量に応じたストロークをもってスライドブロック11、12がY軸方向にスライドする。
(もっと読む)
81 - 100 / 232
[ Back to top ]