
Fターム[5H303EE03]の内容
位置、方向の制御 (6,897) | 位置の設定内容、設定方法、設定手段 (374) | 位置設定値が変化するもの (232)
Fターム[5H303EE03]に分類される特許
161 - 180 / 232
位置検出方法および位置合わせ方法

【課題】矩形状の検出対象物の位置とその向き検出して基準位置への位置合わせを効率的に、しかも高精度に行うことのできる位置検出方法および位置合わせ方法を提供する。
【解決手段】検出対象物の一辺のエッジ位置をそれぞれ検出する第1および第2のラインセンサの出力から前記検出対象物の向きのずれ角を求め、求められた検出対象物のずれ角と前記第1〜第3のラインセンサの出力とから前記ずれ角を補正後における前記検出対象物の各軸方向へのずれ量を求める。そしてx軸およびy軸方向のずれ量X,Yとずれ角θとを3軸同時に制御する。
(もっと読む)
位置制御装置

【課題】フルクローズ位置制御に於いて、送り軸駆動系の剛性が低下した場合に、低周波の振動が発生せず、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差であるたわみ量Psを検出する。たわみ量Psに応じて位置演算器比例定数Kp、前記たわみ量Psを入力とした1次遅れ回路の時定数Tp、被駆動体の速度検出値V1とモータの速度検出値Vmの差分を入力とした1次遅れ回路の時定数Tvを可変する。
(もっと読む)
移動装置
【課題】サーボ制御系が宿命的に持つ位置決め完了後のゆらぎ振動現象を、実用上、問題にならない値に抑制し、位置決め完了後の位置の安定性の向上を図ること。
【解決手段】移動体13の位置を検出するリニアスケール14と、前記第1の位置検出手段の分解能より高い分解能を有し移動体駆動用のサーボモータ26の位置を検出するロータリエンコーダ34とを設け、リニアスケール14によって検出される位置情報に基づく位置決めが完了した後は、リニアスケール14によって検出される位置情報に基づく位置制御を無効にし、ロータリエンコーダ34によって検出される位置情報のみに基づいて位置制御を行う。
(もっと読む)
磁気ディスク装置
【課題】磁気ディスク装置において、機構共振をモデル化した簡単なフィードフォワード制御により高速高精度なシーク動作を行わせること。
【解決手段】磁気ディスク装置は、磁気ディスク、磁気ヘッド、磁気ヘッドを支持して位置決めするヘッドアクチュエータ、磁気ヘッドが所定位置にあるように制御する制御装置を備える。制御装置は、ヘッド位置信号を生成する手段と、磁気ヘッドの目標位置までの目標位置軌道101を生成する手段と、目標位置軌道101からヘッドアクチュエータの近似逆モデル105Aを用いてフィードフォワード制御入力を生成する手段とを有する。フィードフォワード制御入力を生成する手段は、ヘッドアクチュエータの近似逆モデル105Aに共振逆モデル1を追加してヘッドアクチュエータの機構系の共振を含む周波数帯までモデル化している。
(もっと読む)
回転機構付軸方向微動機構および粗微動位置決め装置
【課題】高精度で高い応答性の微動動作が可能であるとともに圧電アクチュエータの破損を防止することができる回転機構付軸方向微動機構を提供する。
【解決手段】回転機構付軸方向微動機構は、対向配置して予圧を付与した2つの転がり軸受装置と、基台に固定され、転がり軸受装置のそれぞれの外輪が嵌合するハウジングと、伸縮方向に対して並列に配置した2つの圧電アクチュエータとを有する。そして、転がり軸受装置のそれぞれの内輪をねじ軸に嵌合させ、内輪をねじ軸に軸方向に固定し、外輪の一方を軸方向に拘束し、圧電アクチュエータと外輪の他方との間に、外輪の他方を押圧するピストンと、ピストンに当接する軸方向の断面形状が円弧状となる間座とを設け、外輪間の軸方向の距離を複数の圧電アクチュエータの伸縮により変化させるようにした。
(もっと読む)
無限インパルス応答フィルタ回路、及び磁気ディスク装置
【課題】係数を適応的に変化させても安定的に動作可能なIIRフィルタ回路を提供する。
【解決手段】係数を適応的に変化させる無限インパルス応答フィルタ回路であって、 その伝達関数が、zの次数がN以下である多項式B(z)と、次数がNである多項式A(z)とを用いて、
で規定され、
として、前記多項式A(z)のzのN乗の項を1としたとき、前記Nが偶数及び奇数に対応して、前記多項式A(z)をあらかじめ定めた条件を満足するよう定められてなることを特徴とする無限インパルス応答フィルタ回路。
(もっと読む)
慣性モーメント同定器を備えたモータ制御装置
【課題】微小動作のみで可動範囲の限定された負荷を低剛性に連結したモータの負荷慣性モーメントを同定することができる慣性モーメント同定器を備えたモータ制御装置を提供する。
【解決手段】トルク指令を入力しトルク指令フーリエ係数を出力するトルク指令フーリエ変換器108と、モータ位置を入力しモータ位置振幅を出力するモータ位置振幅演算器109と、トルク指令フーリエ係数とモータ位置振幅を入力し慣性モーメント同定値を算出する慣性モーメント演算器110と、を有する慣性モーメント同定器107を備える。
(もっと読む)
インパクト駆動アクチュエータ
【課題】 設置位置の調整の手間がなく簡単に移動対象物の位置を検知することができるインパクト駆動アクチュエータを提供する。
【解決手段】 インパクト駆動アクチュエータ100は、パルス電圧の印加により急峻な変形を起こし、衝撃的な慣性力を移動対象物21に与えて移動対象物21を移動させる積層型圧電素子110と、該圧電素子110を移動対象物21に接触させるエアシリンダ120と、圧電素子110と一体的に設けられて移動対象物21の位置を検知する接触式の変位センサ140とを有する。
(もっと読む)
回転軸の定位置停止制御装置
【課題】回転軸が定位置にて停止するまでに要する時間を短縮する。
【解決手段】定位置停止制御装置(10)が、制御周期毎に移動指令を作成する移動指令作成手段(22)と、移動指令作成手段により作成された移動指令に応じて制御周期毎に回転軸(61)を位置制御する位置ループ制御手段(25)と、上位制御装置(45)により作成された速度指令(V0)と所定の速度指令(V1)とのうちの一方の速度指令に応じて回転軸を速度制御する速度ループ制御手段(35)とを具備し、速度ループ制御手段による回転軸の速度制御から位置ループ制御手段による回転軸の位置制御への切換えを行う。この定位置停止制御装置において、移動指令作成手段により作成される移動指令は、回転軸の加減速能力に相当する加速度以下の加速度を有するようにする。
(もっと読む)
電動機制御装置及びそれを用いた搬送システム
【課題】寸法精度を保持したり寸法的な余裕を付与しなくても必要な位置精度が得られるようにした搬送システムとそれを可能にした電動機駆動制御装置を提供すること。
【解決手段】マッピングセンサ4をウエハ7の積載方向に移動させるマッピング装置5と、その電動機2を制御する電動機制御部15を備え、電動機制御部15は予めその内部に持っているラック8の基準位置と、実際にマッピングセンサ4により測定したラック8の基準位置の偏差量を演算し、搬送ロボットによるウエハ7の搬出と搬入に対するティーチングデータの補正が与えられるようにしたもの。
(もっと読む)
基板検査装置
【課題】より高精度な検査面の位置を保つ基板検査装置を提供する。
【解決手段】基板101を検査する基板検査装置において、水平方向に移動するXYステージ121と、XYステージ121上に配置され、上下方向に移動するZステージ103と、Zステージ103を3箇所で上下方向に移動させる圧電素子を有する3つのアクチュエータ機構107a、107b、107c、およびZステージ103を支持する弾性ヒンジ108を備えた。また、Zステージ103上には基板101の中心を仮想中心軸として回転方向に移動するθステージ106が配置され、直線方向に移動するロッド308と、ロッド308に接続され弾性変形しながらθステージ106を回転させる弾性部材113とを備える。
(もっと読む)
加速度センサを用いた制御装置及び調整装置
【課題】被駆動体の加速度に関する情報を用いて、駆動体の制御ゲイン又は時定数を適切かつ定量的に設定可能な制御装置、及び制御ゲイン又は時定数を調整する機能を備えた調整装置を提供する。
【解決手段】制御装置10は、第1加速度センサ6による被駆動体3の加速度検出値を用いて、速度指令作成部14及び電流指令作成部16の制御ゲインを補正する制御ゲイン補正部18を有する。
(もっと読む)
位置制御装置、位置制御方法及び位置制御プログラム
【目的】物体の位置を、物体を保持する移動機構によって目標位置に速やかに追従させる技術を提供する。
【構成】本発明は、物体の位置を検出する位置検出器と、物体を保持しており物体に加える力の指令値が入力され入力された指令値を実現するように動力によって動作する移動機構と、物体に加える力の指令値を移動機構へ出力する指令装置を備える。指令装置内に構築された制御ロジックは、スライディングモード制御ロジックに対してs/(L+K・s+B・s2)の局所的なフィードバックループを付加したものである。この局所的なフィードバックループにより、物体の位置を目標位置に追従させる際にオーバーシュートを生じさせることなく、さらに指令装置が出力する指令値がチャタリングすることを防止できる。
(もっと読む)
モータ制御方法及びモータ制御装置
【課題】 駆動対象を駆動するモータを速度フィードバック制御するにあたり、減速期間中の再加速の発生を防ぎ、再加速発生に起因して生じる騒音の発生を防止する。
【解決手段】 定速駆動状態から減速させて停止させるまでの減速期間において、速度フィードバック制御部へ入力する速度指令として、位置フィードバック制御により得られた速度指令ではなく、減速期間開始時からの経過時間の関数である減速関数を用いて得られた減速指令を用いる。この減速関数は、それ自体が単調減少するものであって、且つ、その導関数が単調関数若しくは定数となるような関数である。このような減速関数に基づいて生成される減速指令によりキャリッジを駆動させると、減速中に再加速することがなく、安定して速度が低下していく。そのため、キャリッジのメカ的なガタに起因する騒音発生も防止される。
(もっと読む)
制御情報生成装置、及び制御情報生成方法
【課題】 自動運転装置の可動部の移動経路、移動順序が変更されても、可動部の動作を制御するプログラムの更新が不要な制御装置、及びその制御装置で使用する制御情報を生成する制御情報生成装置及び方法を提供する。
【解決手段】 可動部が複数の動作ステップの基準位置にいる状態の画像データを動作ステップの実行順に特定する動作ステップ設定部31と、可動部の基準位置を画像データ上で特定する基準位置設定部33を有するシーケンス設定手段21と、可動部の移動方向、及び動作ステップの開始から可動部の移動開始までの遅延時間を設定するタイミング設定手段22と、シーケンス設定手段21及びタイミング設定手段22への入力に基づいて移動経路情報R、遅延時間情報T、及び動作信号情報Sを生成する制御情報生成手段23を有するように制御情報生成装置2を構成する。
(もっと読む)
モータ位置決め装置
【課題】 位置決め制御部とモータ制御部を別筐体とするモータ位置決め装置において、位置決め制御部からモータ制御部に伝達される速度指令の電気的変動要素を排除し、かつ制御特性の自由度を確保する。
【解決手段】 位置決め制御部18は、指令パルス発生器19からの指令パルスを偏差カウンタ20により積算しロータリーエンコーダ27からのパルスを減算して偏差量を得、パルス変換器21により偏差量に応じた周波数のパルスに変換し、サーボアンプ22にパルス周波数指令信号Cとして出力する。モータ制御部22は、周波数カウンタ23によりパルス周波数指令信号Cの周波数を速度指令として速度演算部24に送り、回転制御部25により回転されるモータ26の回転軸に取り付けられたロータリーエンコーダ27から出力されるパルス周波数が速度指令と等しくなるようにモータを回転させる。また、偏差カウンタ20からの偏差量が0になると、モータが停止する。
(もっと読む)
磁気予圧及び運動誤差補正機能を有する定圧ベアリング移送装置
本発明は、永久磁石の磁力による予圧を発生させ、予圧に作用される磁力を変化させ、定圧ベアリングの浮上間隙を調整することのできる、磁気予圧及び運動誤差補正機能を有する定圧ベアリング移送装置を提供するものである。このために、本発明の構成は、テーブルと向い合う一側面にだけガイド面が形成されるガイドと、前記ガイド面と対応するように定圧ベアリングパッドが配置されるテーブルと、前記ガイドとテーブルの間に予圧を発生させる磁気予圧装置と、前記磁気予圧装置を制御する制御器及び該当電流を印加させる電力増幅器の具備された運動誤差補償制御手段とを含み、前記磁気予圧装置は、永久磁石と、前記永久磁石の磁力線と同一線上に位置するコアに巻線される電磁石コイルから成り、前記磁気予圧装置が定圧ベアリングパッドとガイドの間で予圧に作用して、磁気予圧及び運動誤差補正機能を有する定圧ベアリング移送装置を提供する。従って、本発明は、両面パッド型から単面パッド型に構造が改善されることによって、テーブルとガイドの単純化を図る一方、浮上間隙の誤差を補正して、定圧ベアリングガイドの運動誤差を減少させることができる効果がある。 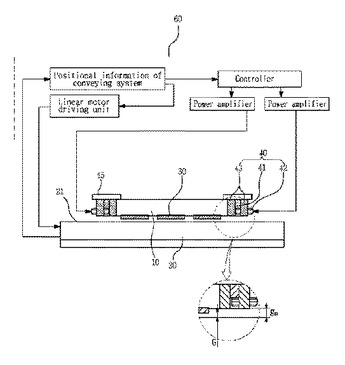 (もっと読む)
(もっと読む)
位置決め制御装置および位置決め制御方法
【課題】 質量中心がすれた場合でも簡便に質量中心座標を演算し、座標変換精度を向上させ、良好な位置制御性能を得る位置決め制御装置および位置決め制御方法を提供する。
【解決手段】 少なくとも2個のX軸モータと、少なくとも2個のY軸モータを駆動する位置決め制御装置において、位置センサの位置情報に基づいてスライダの姿勢情報を生成する座標変換部106と、座標変換部より出力される信号と目標姿勢より各モータの電流指令を決定する位置決め制御部102と座標変換部より出力される信号と位置決め制御部より出力される各推力指令及びトルク指令より推定外乱を出力する外乱オブザーバ部104と外乱オブザーバ部より出力される推定外乱よりスライダの質量中心位置を演算する質量中心位置推定部105とを備える。
(もっと読む)
位置決め制御装置
【課題】複数軸の同期制御において演算周期単位での同期が可能な位置決め制御装置を得ること。
【解決手段】所定の位置決めポイント毎に、指令位置、加速演算周期数、定速演算周期数及び減速演算周期数を指定したポイントテーブル形式の制御データを格納したメモリと、メモリに格納された、位置決めポイント毎の指令位置、加速演算周期数、定速演算周期数及び減速演算周期数を解析し、位置決めポイント毎の指令速度、加速度及び減速度を求める解析手段と、解析手段により求められた、位置決めポイント毎の指令速度、加速度及び減速度に基づいて、位置決めポイント毎の速度及び位置指令値を求め、ポイントテーブルに指定された加速演算周期数、定速演算周期数及び減速演算周期数で位置決めポイント毎の位置決めが完了するように、駆動軸ドライバに位置決めポイント毎の速度及び位置指令値を出力する位置指令手段と、を備える。
(もっと読む)
歩行ロボット
【課題】 複数のリンクからなるロボットの体幹に固定された加速度センサの出力に含まれるバイアス値をキャンセルするオフセット値を設定する。
【解決手段】 ロボット本体100に所定の静止姿勢をとらせる。その状態で体幹に固定された加速度センサの出力と、加速度センサの鉛直方向に対する姿勢角を検出する姿勢角センサの出力を読み込む。姿勢角から加速度センサの加速度検出方向を算出する。その方向の重力加速度ベクトルの成分を算出する。取り込んだ加速度センサの値から、算出した重力加速度ベクトルの成分を減算する。減算した結果の値がバイアス値に対するオフセット値となる。ロボット制御時には、加速度センサの出力値を取り込む際、取り込んだ値からオフセット値を減算して制御に用いる。ロボット制御装置内で正確な加速度の値を使用することができる。
(もっと読む)
161 - 180 / 232
[ Back to top ]