
Fターム[5H501JJ18]の内容
Fターム[5H501JJ18]に分類される特許
1 - 20 / 88
油圧制御装置及びそれを備えた四輪駆動車両の駆動力配分装置
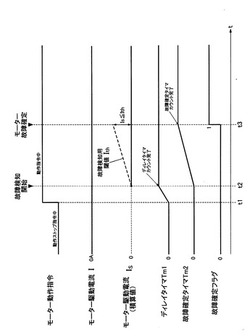
【課題】電動モータの故障を高い精度で検知できると共に、電動モータの正常状態を故障と誤検知する確率を低く抑えることができるようにする。
【解決手段】モータ(電動モータ)(37)により駆動されるオイルポンプ(35)から供給される油圧によって前後トルク配分用クラッチ(10)の作動制御を行う四輪駆動車両用の油圧制御装置(60)において、モータ(37)の故障判定を行うモータ故障判定手段(50)は、モータ(37)の故障検知開始時点(t2)からモータ(37)の駆動電流値(I)を積算したモータ駆動電流積算値(Is)の算出を行うと共に、モータ故障判定用の閾値(Ith)を所定の割合で増加させる。そして、モータ駆動電流積算値(Is)が闇値(Ith)以下となった場合、故障確定タイマ(Tm2)のカウント完了を待ってモータ(37)の故障確定判定を行う。
(もっと読む)
同期制御システム

【課題】コントローラ装置の制御周期Tcがドライブ装置の駆動周期Tdの整数倍ではない場合にも同期を確保して設計上の自由度を増大させる。
【解決手段】コントローラ装置1の制御周期よりも駆動周期が短いドライブ装置30Aが、コントローラ装置1からの同期信号に合わせて駆動周期の起動タイミングを調整する周期タイミング補正手段33を備え、調整後の起動タイミングに従って駆動されるシステムにおいて、制御周期が駆動周期の整数倍でない場合に、制御周期に含まれる駆動周期の回数と端数時間とを求め、駆動周期の回数を変えずに1回以上の駆動周期を増加させた時の増加分の合計時間が前記端数時間に一致するように当該駆動周期を演算し、または、駆動周期の回数を増加させて1回以上の駆動周期を減少させた時の減少分の合計時間が元の駆動周期と端数時間との差に一致するように当該駆動周期を演算する周期演算手段32を備える。
(もっと読む)
モータ制御装置
【課題】単相のエンコーダ信号によって三相スイッチング制御を実行する。
【解決手段】エンコーダ8は、二相のエンコーダ信号PA、PBを出力する。二相制御手段17は、両方のエンコーダ信号PA、PBに同期して励磁相を切換える。ひとつのエンコーダ信号だけが失われると、単相制御手段18によってモータ7が制御される。単相制御手段18は、失われたエンコーダ信号に代わって切換時期を推定する推定手段23を備える。単相制御手段18は、初期にオープン制御手段25によるオープン制御を実行する。オープン制御によってモータ7の回転が安定すると、単相フィードバック制御手段24による制御へ移行する。単相フィードバック制御手段24は、正常なエンコーダ信号と、推定された切換時期との両方に応答して励磁相を切換える。この結果、単相だけでもモータ7の制御が実行される。
(もっと読む)
モータ制御装置
【課題】基準位置を設定する壁当て制御の回数を抑制する。
【解決手段】壁当て制御手段23は、マニュアルレバー4をP壁5に押し付けることによってモータ7を制御するための基準位置を設定する。壁当て制御は、初期化条件の成立に応答して実行される。初期化条件は、電源スイッチ31のオン操作、および外部電源33の接続である。禁止手段は、初期化条件が非成立となってから、利用者が車両10から所定の閾値Dthを越えて離れるまで、初期化条件が再び成立しても、壁当て制御を禁止する。この結果、再度の壁当て制御を回避することができる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
射出成形機
【課題】整流部に流れる循環電流を抑制できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102と、前記駆動回路と整流器102との間に設けられたコンデンサ301と、前記駆動回路と整流器102との間の直流電力を交流電力に変換するブリッジ回路104と、ブリッジ回路104の交流部側に接続された高調波成分抑制部63と、整流器102に並列接続された回生経路82とを有し、ブリッジ回路104と高調波成分抑制部63とを回生経路82に備える、射出成形機あって、ブリッジ回路104を構成する複数のスイッチング素子は、コンデンサ301の電圧が所定値以上のとき、前記モータの電力を回生するようにオン/オフし、コンデンサ301の電圧が前記所定値未満のとき、全てオフする、ことを特徴とする、射出成形機。
(もっと読む)
モータ制御装置、モータ制御方法及びイオン発生装置
【課題】モータの回転の開始指示から、該開始指示に応じた駆動電圧でモータが回転を開始するまでの遅れをなくすことが可能なモータ制御装置、モータ制御方法及びイオン発生装置を提供する。
【解決手段】電源投入時を含めてモータ2が停止した時以降に、断続回路91のコンデンサ913による充放電信号のレベルがコンパレータ915の上側閾値を上回った場合は、断続回路91がPWM駆動回路92に与えられるべきPWM制御信号を断続するため、モータ2に印加されるべき駆動電圧が断続される。これに対し、制御部のCPUは、PWM制御信号のデューティを制御することによってモータ2に印加されるべき駆動電圧を制御しており、電源の投入時以降及びモータ2の回転の停止指示の入力時以降、PWM制御信号が、モータ2の回転数で言う「微弱」に対応するデューティとなるように制御する。
(もっと読む)
電動機の制御方法
【課題】低負荷時の効率を従来よりも向上できる電動機の制御方法を提供する。
【解決手段】要求動作点Dとなる可変の要求回転数n1および要求トルクTn1に基づき、実際の出力動作点である出力回転数および出力トルクを要求動作点に一致させるように電気入力を制御する電動機の制御方法であって、所定の単位時間tAを通して、要求回転数n1に出力回転数を継続的に一致させるとともに、要求回転数n1の条件下で要求トルクTn1を継続的に出力することによって得られる効率よりも高い効率が得られるトルク値でありかつ要求トルクTn1よりも大きい高効率トルク値(最高効率トルク値Tn1e−max)を含んで電動機が実際に出力する瞬時トルクT(t)を変遷させ、瞬時トルクT(t)の単位時間tAを通した時間平均値で求められる出力トルクが要求トルクTn1に一致するように電気入力を制御する。
(もっと読む)
モータ駆動制御装置
【課題】共有メモリに調整用データとモニタデータとをこの順に排他的に保存する場合にユーザに特別な操作を要求することなく、自動的に共有メモリへの保存データの切り替えが行えるモータ駆動制御装置を得ること。
【解決手段】データ入出力装置10を用いた制御機能の調整設定時において、スイッチ7に調整用データ取得部5aの出力端と共有メモリ8のデータ入力端とを接続させ、その後、データ入出力装置10が出力する制御機能の調整設定の完了通知に応答してスイッチ7にモニタデータ取得部6の出力端と共有メモリ8のデータ入力端とを接続させるスイッチ切替信号17を発生する手段を備えた。
(もっと読む)
信号伝達装置及びこれを用いたモータ駆動装置
【課題】ドライバチップの異常検出期間が短過ぎると、異常パルス信号のパルス生成が停止された後、異常判定期間の経過前に異常パルス信号のパルス生成が再開されてしまい、コントローラチップでドライバチップの異常を認識することができなくなるおそれがあり、2つの回路を絶縁しつつ一方の異常を確実に他方に伝達することのできる信号伝達装置、及びこれを用いたモータ駆動装置を提供する。
【解決手段】信号伝達装置100は、第1回路110と第2回路120との間を絶縁しながら信号伝達を行うものであり、第1回路110は、第2回路120から伝達される異常パルス信号Sbを監視して第2回路120の異常有無を判定し、第2回路120は、第2回路120で異常が検出されてから少なくとも第1回路110で第2回路120の異常有無が判定されるまで異常パルス信号Sbを異常状態に保持する。
(もっと読む)
モータの駆動制御プログラム、駆動制御方法及び駆動制御装置
【課題】従来のモータ制御方法では、モータの制御性を十分に確保することができない問題がある。
【解決手段】本発明にかかるモータ駆動制御プログラムは、モータの回転位置に応じて生成するPWM信号の状態を遷移させる演算コア10と、ドライバ回路3を介して前記PWM信号をモータに出力する出力インタフェース13と、ドライバ回路3がPWM信号に基づき生成した3相の駆動信号から選択した比較対象検出信号SPと3相の駆動信号の中点電圧を示すのセンタータップ電圧CTとを比較するコンパレータ15と、を有するプロセッサにおいて演算コア10で実行されるモータの駆動制御プログラムであって、コンパレータ15の出力信号の値に基づきコンパレータ積分値を増減し、コンパレータ積分値がカウント初期値に達したことに応じてモータの回転位置が遷移したことを検出し、検出結果に応じてPWM信号の状態を次状態に遷移させる。
(もっと読む)
自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法
【課題】自動扉が傾いた場所に設置された場合であっても、扉の開動作及び閉動作を所定の時間で行うことができる自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法を提供する。
【解決手段】モータ駆動装置29の駆動制御部41は、カウンタ部44の記憶部Cnt2A、Cnt2B、Cnt4に予め設定された切替条件に従って、移動速度を切り替えながら自動扉の開又は閉動作を行い、自動扉の移動開始位置から移動停止位置までの移動時間をタイマ部45にて測定する。測定した移動時間が仕様などに規定された所定時間より短い/長い場合、減速開始点補正部46にて自動扉の高速移動から減速移動への切り替えを早める/遅らせるよう、切替条件の変更を行う。
(もっと読む)
自動機械の制御装置
【課題】稼働率の低下を抑えること。
【解決手段】サーボ制御部17が、サーボモータ21の回転を制御し、異常検出部18が、サーボ制御部17への電源供給遮断状態(すなわち、サーボ制御部17によるサーボモータ21の制御が非制御の状態)において、エンコーダ23によって検出されたサーボモータ21の回転位置(エンコーダ値)を取得するとともに、取得したエンコーダ値に基づいてブレーキ22の異常を検出するように制御装置1を構成する。
(もっと読む)
回転電機およびその制御方法
【課題】 不連続なトルク変動を起こさず、相ごとの巻線部のインダクタンス成分の変更を行うことができる回転電機を提供する。
【解決手段】 SRモータには、ステータの突極ごとに巻線が巻回されている。ひとつの巻線、または複数の巻線を直列あるいは並列に接続すること、により構成される巻線組は、さらに電気的かつ機械的に接続することで、相ごとの巻線部を構成する。ECUは、巻線部のインダクタンス成分の変更が必要であると判定したとき(S101)、巻線部に電流が流れているか否か判定する(S102)。巻線部に電流が流れておらず、かつ巻線部に電流が流れるまでの時間が当該巻線部のインダクタンス成分を変更するための時間に比べて長い場合(S103)、巻線部のインダクタンス成分を変更する(S104)このとき、SRモータでは、複数の巻線組を直列接続または並列接続に切り換える。
(もっと読む)
電流制御装置
【課題】モータ回転速度センサを不要とし、適用範囲の広い故障検出が可能な電流制御装置を提供することにある。
【解決手段】電流制御用半導体素子1は、同一半導体チップ上に、負荷を駆動するトランジスタ4と、負荷の電流を検出する電流検出回路7と、電流指示値と電流検出回路が出力する電流値より、トランジスタのオンDutyを演算する補償器8と、オンDutyに基づいてトランジスタをオンするパルスを生成するPWMタイマ12とを有する。マイクロコントローラ6は、電流制御用半導体素子1に電流指令値を送信するとともに、電流制御用半導体素子1から、電流検出回路7が出力する電流値と、補償器8が出力するオンDutyを受信し、受信した電流値とオンDutyから電流制御用半導体素子1の故障を検出する。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】逆転暴走状態を誤認することなく正確に検出可能なドア駆動制御装置、及び、従来よりも安全性を向上させたドア駆動制御方法を提供する。
【解決手段】ドア1の駆動用のモータ2に電力を供給する電力変換器14を備え、ドア1の速度検出値と速度指令値とを用いたフィードバック制御により電力変換器14を運転し、ドア1の速度を制御するドア駆動制御装置に関する。速度検出値を用いてドアの加速度を演算する加速度演算手段と、この加速度演算手段から出力された加速度検出値と前記速度検出値とから所定時間後のドアの速度を予測し、その予測速度が正または負の第3の設定速度を超えた場合に、予測速度異常信号を出力する異常判定手段と、を備える。
(もっと読む)
自動製パン器
【課題】モータの異常を精度よく検知し得る自動製パン器を提供する。
【解決手段】自動製パン器は、原動軸に回転動力を付与可能な粉砕モータ60と、粉砕モータ60を駆動するための電力を供給する電源部121aと、電源部121aの状態を検知する電源状態検知回路125と、粉砕モータ60の異常を検知する制御装置120と、を備える。制御装置120は、電源部121aの状態によって異なり得る基準を用いて、粉砕モータ60の異常を検知する。
(もっと読む)
自動製パン器
【課題】供給される交流電力の周波数の影響を簡易的に抑制する自動製パン器を提供する。
【解決手段】自動製パン器は、混練モータ50及び粉砕モータ60と、これらのモータを駆動するための交流電力を供給する電源部121aと、電源部121aが供給する交流電力の周波数を検知する電源周波数検知回路125と、上記のモータの駆動を制御する制御装置120と、を備える。制御装置120は、電源周波数検知手段125が検知する、電源部121aが供給する交流電力の周波数に応じて、上記のモータを駆動させる時間の長短を調整する。
(もっと読む)
操舵装置
【課題】 不揮発性メモリに推定温度データを書き込むことができなかった場合でも、過熱防止機能を維持しつつ、電動モータによる操舵機能が十分得られるようにする。
【解決手段】 マイコンは、EEPROMのデータが異常である場合には、予め高温設定された仮基板温度Tbmaxから温度センサにより検出された基板温度Tbを減算した基板温度変化値ΔT(Tbmax−Tb)を使って、モータ推定温度を計算するための各仮温度値SUM1max,SUM2max,SUM3maxを補正する(S61,S62)。従って、基板温度Tbに応じた初期値SUM1(n-1),SUM2(n-1),SUM3(n-1)を設定することができる。この場合、温度センサが異常である場合には、基板温度変化値ΔT(Tbmax−Tb)を使った補正を行わない(S63)。
(もっと読む)
リニアソレノイド制御装置
【課題】定常状態以外でも良好にコイルの抵抗値が推定でき、高いロバスト性を有してリニアソレノイドのフィードバック制御を実施する。
【解決手段】リニアソレノイドに印加する駆動電流の目標値である目標電流Irを調整する目標値フィルタ11を通過後の目標電流と実際の駆動電流の検出値である検出電流Ifbとの偏差を積分演算部13において積分補償し、比例微分演算部14において検出電流Ifbを比例補償すると共に微分補償し、抵抗値推定部15において駆動電流の推定値と検出電流Ifbとの偏差に抵抗値推定パラメータRを乗じて積分補償してコイルの抵抗値を推定し、積分演算部13及び比例微分演算部14の演算結果の偏差に基づいて基本電圧指令を演算すると共に、推定されたコイルの抵抗値に基づいて基本電圧指令を補正して電圧指令Vrを演算する。
(もっと読む)
1 - 20 / 88
[ Back to top ]