
Fターム[5H501KK06]の内容
Fターム[5H501KK06]に分類される特許
1 - 20 / 343
モータ駆動装置
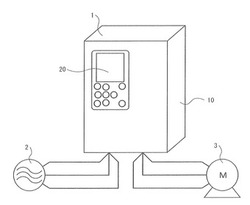
【課題】設定内容とともに設定に必要となる関連情報を同時表示する設定表示装置を用いることで簡便かつ迅速な設定を可能とするモータ駆動装置を提供する。
【解決手段】設定表示装置20によりモータ駆動に関する設定が行われるモータ駆動装置1であって、この設定表示装置20は、ある設定項目の設定内容を変更する際に、設定項目の設定内容を表示し、さらに設定項目に関連する少なくとも1以上の関連項目の関連情報を表示するようにした。
(もっと読む)
負荷制御システムおよび負荷駆動システム

【課題】負荷駆動のためのアクチュエータ等の負荷駆動要素を複数制御する場合、その制御システム構築が容易となる負荷制御システムを提供する。
【解決手段】負荷駆動のための複数の負荷駆動要素のそれぞれを駆動制御するために、該複数の負荷駆動要素に対応して設けられる複数のドライバを含む負荷制御システムであって、複数のドライバのそれぞれは、自ドライバに直接関連付けられた負荷駆動要素を制御する制御部を有する。そして、複数のドライバのそれぞれは、負荷制御システムにおいて、自ドライバの制御部から該自ドライバを除く他のドライバの全部または一部の対象ドライバの制御部に対して、該対象ドライバに直接関連付けられた負荷駆動要素の駆動制御を行うための指令信号の送信が可能となる相互制御通信状態が形成されるように、互いに電気的に接続される。
(もっと読む)
スイッチトリラクタンスモータの制御装置
【課題】巻線に流す電流の制御タイミングを最適に調整すること。
【解決手段】中性点で相互に接続された複数の相の巻線を有し、各相から中性点に向かう電流または中性点から各相へ向かう電流をロータの回転位置に応じて供給することで動作するスイッチトリラクタンスモータの制御装置において、ロータの回転に応じて順次制御対象となる相を、通電する相としての通電相または通電しない相としての非通電相のいずれかに設定する設定手段(通電相マップ23)と、ロータの回転に応じて制御対象となる相が通電相に設定されている場合には、当該相に対して通電する通電手段(駆動信号生成部30)と、通電手段によって通電する相の前後の相の通電相/非通電相の組み合わせによって、当該相の巻線に流す電流の制御のタイミングを調整する調整手段(転流信号生成部29)と、を有する。
(もっと読む)
車両用操舵装置
【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】モータや被駆動体の仕様の変更等に応じてモータの制御情報を容易に変更でき、利用者のニーズに応じて制御情報の設定をカスタマイズ可能な汎用性を持ったモータ制御装置及び画像形成装置を提供する。
【解決手段】モータ制御装置の記憶媒体11は、制御ゲインを書き換えるための外部入力データに基づいて制御ゲインを自在に書き換え可能な書き換え可能領域12と、外部入力データに基づく書き換えが禁止又は条件付きで許容された書き換え不可能領域13とを有する。また、外部入力データに基づいて、記憶媒体11の書き換え可能領域12に記憶されている制御ゲインを書き換えるモータ制御IC14を備える。
(もっと読む)
電動機装置および電気自動車
【課題】電動機をより適正に制御する。
【解決手段】同期数Nsが変更されてから時間t1の間は前回Ios*から設定した仮オフセット電流Iostmpに向かって変化量kの範囲内で変化するようようオフセット電流Iosを設定し(S100,S130,S140)、時間t1から時間t2の間は同期数Nsを用いてオフセット電流Iosを設定し(S100,S110,S150)、オフセット電流Iosを制御用目標電流に加えたものを目標相電流に設定し、d軸,q軸に流れる電流が目標相電流となるようにするためのフィードバック制御によりd軸,q軸に印加すべき目標電圧を設定し、設定した目標電圧を2相−3相変換して目標相電圧を設定し、設定された目標相電圧が各相に印加されるようインバータをスイッチング制御する。こうした制御により、モータをより適正に制御することができる。
(もっと読む)
電動コンプレッサ
【課題】電源接続の解除を検知するまでの時間を短縮し、コンデンサの残留電圧による感電を防止する電動コンプレッサを提供する。
【解決手段】高電圧電源140と接続する電源コネクタ130とパワー素子118との間を接続する電源ライン111の電源供給ライン111aに一端が設けられ、グランドライン111bに他端が設けられたコンデンサ114に対して、電源コネクタ130側の電源供給ライン111aに、高電圧電源140からパワー素子118の方向へ流れる電流を正とし、逆方向に流れる電流を負として検出する電流検出部113を設け、電流検出部113と電源コネクタ130との間に電源供給ライン111aとグランドライン111bとを直結する負荷抵抗112を設ける。制御部116は、電流検出部113によって検出された電流値が0未満になると、高電圧電源140の接続が解除されたと検知する。
(もっと読む)
交流電源の電源特性に応じてモータの出力を制限するモータ駆動制御装置
【課題】モータに電力を供給する交流電源の電圧低下による悪影響が及ぼされないモータ駆動制御装置を提供する。
【解決手段】制御パラメータ決定部10は、モータ3の駆動中に交流電源2の電圧Vminが目標値Vlowより下であるか否かを、交流電源2の電圧特性に基づいて判断し、交流電源2の電圧Vminが目標値Vlowより下であると判断した場合、交流電源2の電圧Vminが目標値Vlowとなるモータ3の出力の制限値を演算し、モータ3の出力をモータ3の出力の制限値以上に制限する制御パラメータCpを設定し、制御パラメータCpを、駆動制御部7が指令値Iを決定するために駆動制御部7に供給する。
(もっと読む)
可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置
【課題】モータ駆動式の可変バルブタイミング制御システムにおいて、モータ回転状態検出系の異常診断の誤判定を未然に防止する。
【解決手段】エンジンのクランク軸10の回転速度の1/2の回転速度に対してモータ18の回転速度を調整することでクランク軸10に対するカム軸13の回転位相(カム軸位相)を変化させてバルブタイミングを変化させる。モータ18を駆動するEDU23は、モータ回転位置に応じた位置信号とモータ回転方向に応じた方向信号をECU22に出力する。モータ回転速度が小さくなると、位置信号や方向信号のエッジを検出できないためにモータ回転状態検出系の異常診断を誤判定する可能性がある。この対策として、ECU22は、カム軸位相変化速度とエンジン回転速度に基づいてモータ回転速度を推定し、モータ回転速度が0付近の所定範囲内にあるときに異常診断を禁止する。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
電動機制御装置
【課題】 電動機のフィードバック制御部での制御パラメータの自動調整機能を有した好適な電動機制御装置を提供する。
【解決手段】 位置制御部11と速度制御部21とノッチフィルタ部32と電流制御部41とからなる電動機制御装置3において、応答状態測定部71では制御パラメータ調整部72での位置制御部11および速度制御部21の制御パラメータの変更に伴って、電動機6の回転速度などの発振状態を監視し、また、制御パラメータ調整部72では前記制御パラメータを再設定して電動機6を駆動するという作業を前記発振状態が無くなるまで行った後は、このときの前記制御パラメータを保持させる動作を行っている。また、機械振動検知部73は上述の設定動作のたびに電動機6の回転速度などの振動状態を監視し、振動状態を検知した場合には、ノッチフィルタ調整部74において、その振動周波数を検知し、検知した振動成分を減衰させるようにノッチフィルタ部72のノッチ周波数を設定する動作を行うようにしている。
(もっと読む)
モータ装置
【課題】給湯装置に使用されるファンを駆動するモータ装置に関する情報を早期に把握することができるモータ装置を提供することを課題とする。
【解決手段】給湯装置に使用されるファンを駆動するモータ装置であって、当該モータ装置の製造時期、製造数量、製造場所、工場名、製造担当者、形式、機種名、シリアル番号、ロット番号、ライン番号、及びメーカ名、のうちの少なくとも一つを含む当該モータ装置に関する情報を記憶した記憶部を備えたモータ装置。
(もっと読む)
部品実装装置および部品実装装置におけるモータ制御方法
【課題】過負荷状態の確実な防止と動作効率の維持向上を両立させることができる部品実装装置および部品実装装置におけるモータ制御方法を提供すること。
【解決手段】モータの負荷状態を負荷検出部によって検出して監視し、負荷率が当該モータの定格負荷に基づいて予め設定された基準負荷率を超えた場合には、負荷率が予め設定された低減率Δp1で減少するようにモータの回転速度・回転加速度の組み合わせで規定される駆動パラメータを変更させる負荷低減処理を行い、負荷率が低減された状態で部品実装作業を継続実行する過程において、負荷率が基準負荷率を超える状態が発生しなかった場合には、負荷率が予め設定された回復率Δp2で段階的に増加するように駆動パラメータを変更する負荷率回復処理を反復して行い、負荷率が再度基準負荷率レベルを超えた場合には、直前の負荷率に戻してこの負荷率を確定駆動パラメータとして設定する。
(もっと読む)
回転角度位置検出装置及びその誤差検出方法
【課題】簡易な構成でレゾルバから出力される多相出力信号に基づいて位置検出値を演算する位置信号演算部の検出誤差を求める。
【解決手段】ロータの回転角に応じて360°/N(Nは3以上の整数)毎の位相差を有するN相の位置信号を出力するレゾルバ30と、該レゾルバから出力されるN相位置信号が入力され、当該N相位置信号を信号処理して位置検出値を演算する位置信号演算部200と、前記レゾルバ及び前記位置信号演算部間と、当該位置信号演算部内との何れか一方に設けた前記N相位置信号の前記位置信号演算部のN相入力端子への入力を順次シフトさせたN段階に切換える信号切換回路61と、該信号切換回路で入力を切換える毎に、前記位置信号演算部から出力される位置検出値に基づいて検出誤差を計測し、計測した各検出誤差の平均値に基づいて前記位置信号演算部の検出誤差を算出する検出誤差算出部62とを備えている。
(もっと読む)
自動製パン器
【課題】モータの異常を精度よく検知し得る自動製パン器を提供する。
【解決手段】自動製パン器は、原動軸に回転動力を付与可能な粉砕モータ60と、粉砕モータ60を駆動するための電力を供給する電源部121aと、電源部121aの状態を検知する電源状態検知回路125と、粉砕モータ60の異常を検知する制御装置120と、を備える。制御装置120は、電源部121aの状態によって異なり得る基準を用いて、粉砕モータ60の異常を検知する。
(もっと読む)
モータ駆動制御装置
【課題】制御対象のモータの駆動電流がPWM制御の目標電流に増大してからPWM制御に移行し、PWM制御で駆動電流を目標電流に維持する場合に、目標電流に到達するタイミングとPWM制御のキャリア周期(制御周期)とのずれに基づくモータの駆動電流の変動ひいてはトルクの低下や変動を防止する。
【解決手段】演算処理部41の演算部41aおよび補正部41cにより、制御対象のSRモータ1の通電開始タイミングからの通電によって駆動電流がPWM制御の目標電流に立ち上がるタイミングを導出して予測し、キャリア周期と駆動電流がPWM制御の目標電流に立ち上がるタイミングとの偏差に基づいて通電開始タイミングを補正する。
(もっと読む)
回転電機制御装置
【課題】回転電機制御装置において、コスト上昇を抑制しつつ、回転電機のロック相当状態での電流制限される機会を少なくして、回転電機の出力を有効に活用できるようにすることである。
【解決手段】回転電機制御装置10は、インバータ14を制御する制御部16を備える。制御部16は、回転電機12がロック相当状態である場合に、各相電流の電気角を取得する状態取得手段34と、各相電流の電気角から複数のスイッチング素子Su1、Su2、Sv1、Sv2、Sw1、Sw2のうちで最も温度的に厳しくなる最高温度予測素子を特定する素子特定手段36と、最高温度予測素子への通電電流に応じた継続通電許容時間である最短出力許容時間を推定する最短許容時間推定手段38と、最短出力許容時間経過後に回転電機12の電流制限を実行する電流制限実行手段40とを有する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
モータ制御システム
【課題】車両に搭載される同一定格出力の2つのモータを全領域で効率よく駆動させる。
【解決手段】モータ制御システム1のECU8は、記憶部9とCPU10とを有する。記憶部9には、第1及び第2モータ4a,4bの全体としての効率に基づいて予め設定された低トルク領域、中トルク領域及び高トルク領域の境界を示す境界トルクTx,Tyが記憶される。CPU10の判定部12は、要求トルクTnと境界トルクTx,Tyとを比較して、モータ回転数Nと要求トルクTnとが属する領域を判定する。CPU10の制御部13は、判定された領域が低トルク領域の場合には、第1モータ4aのみを駆動し、中トルク領域の場合には、第1モータ4aが最大トルクを出力する状態で第1及び第2モータを駆動し、高トルク領域の場合には、第1及び第2モータを同等に駆動する。
(もっと読む)
モータに供給する電流の時系列データを生成するプログラム、方法、装置及びレーザ加工装置
【課題】モータに印加される電圧を飽和させない電流の時系列データを得るのに有利な技術を提供する。
【解決手段】対象物を移動させるモータを含む制御系を第1状態から第2状態へ遷移させるために前記モータに供給する電流の時系列データをコンピュータに生成させるプログラムであって、前記コンピュータに、前記時系列データにより前記モータに印加される電圧の絶対値の最大値を制約する条件を含む制約条件を設定させ、前記時系列データを評価するための評価関数を設定させ、前記制約条件を満たすように、且つ、前記評価関数の値が所定の条件を満たすように、前記時系列データを求めさせる、ことを特徴とするプログラムを提供する。
(もっと読む)
1 - 20 / 343
[ Back to top ]