
Fターム[5H501LL32]の内容
Fターム[5H501LL32]に分類される特許
1 - 20 / 193
モータを制御するための方法およびシステム
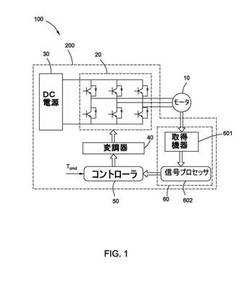
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
モータ制御装置およびトルク値取得方法

【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
電動機の制御装置、制御システム及び制御方法
【課題】電動機のトルクを、安定して高い精度で制御できる、電動機の制御装置、制御システム及び制御方法を提供する。
【解決手段】永久磁石同期電動機の回転軸に、半導体歪みセンサの出力を無線送信する無線送信装置を取り付ける一方、電動機本体に無線送信装置からの送信を受信する無線受信装置を設ける。電動機を駆動制御する制御装置は、無線送受信装置を介して歪みセンサの出力を入力し、電動機のトルクを検出し、トルク検出値とトルク指令値との偏差に基づき、電動機のPWM制御信号を演算して出力する。これにより、電動機における電流とトルクとの相関が、永久磁石の温度変化や劣化によって変動しても、電動機のトルクを高精度に制御できる。
(もっと読む)
車両用操舵装置
【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
制振制御装置及び制振制御方法
【課題】制御ループの高い安定性を確保することができる制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、第1フィルタを用いて、車両の車両情報に基づいて、第1トルク目標値を設定する第1トルク目標値設定手段と、モータの回転速度を検出するモータ回転速度検出手段と、第2フィルタを用いて、モータ回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を設定する第2トルク目標値設定手段と、第1トルク目標値設定手段により設定された第1トルク目標値と、第2トルク目標値設定手段により設定された第2トルク目標値とを加算して、トルク指令値を算出する第1加算手段と、第1加算手段により算出されたトルク指令値に基づき、モータを制御するモータ制御手段とを備え、第2フィルタの制御定数は、車両の駆動系の固有振動周波数より低い周波数に基づいて設定されている。
(もっと読む)
車両用駆動制御装置
【課題】駆動系の機械共振を適切に抑制する。
【解決手段】アクセル開度および速度に基づく要求駆動力に応じて走行用モータに対するトルク指令を出力するトルク指令生成部41と、トルク伝達系の固有振動周波数成分を減衰させるようにして、トルク指令に減衰フィルタ処理を行なって処理後のトルク指令を出力するトルク指令ノッチフィルタ42と、処理後のトルク指令に応じたトルクを発生させるように走行用モータを制御する動力指示部と、調整パラメータ演算部43とを備え、調整パラメータ演算部43は、走行用モータの回転数が所定回転数以下かつトルクが所定トルク以上である場合にトルク指令ノッチフィルタ42の減衰フィルタ処理の減衰特性を同定する。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの回転角速度に基づいて精確に電動モータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、モータ方程式に基づいて電動モータの回転角速度を算出する。そして、電動モータの運動状態に基づいてモータ方程式の近似式を算出し、この近似式に基づいてモータ方程式の逆起電圧定数を更新する。電動モータのトルクが付与される駆動体の動作に応じて信号を出力するセンサと、センサの出力信号に基づいて電動モータの回転角速度の演算値を算出する演算器とを備え、電動モータの電流の測定値が所定範囲内のとき、電動モータの電圧の測定値および前記回転角速度の演算値を記憶し、記憶した電圧の測定値の数または回転角速度の演算値の数が所定数以上のとき、近似式を算出する。
(もっと読む)
モーター駆動方法、モーター駆動装置およびロボット
【課題】ロボットアームなどの被駆動部を高速で動作させることができるモーターの駆動方法、駆動装置およびロボットを提供する。
【解決手段】モーターの駆動トルク計測データと回転数計測データと、を取得する駆動データ取得工程と、前記駆動トルク計測データと前記回転数計測データと、を前記モーターの回転数/トルク特性テーブルと比較する比較工程と、前記比較工程の比較結果において、前記駆動トルク計測データと前記回転数計測データとが、前記回転数/トルク特性テーブルの駆動可能領域境界にある場合、前記モーターの駆動電圧を昇圧させる昇電圧工程と、を備えるモーター駆動方法。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵トルクに対して電流指令値が零に設定される不感帯が適正に設定できない場合でも、モータ電流零の状態を検出してモータ電流検出値のオフセット誤差を補正する電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値I、操舵トルクT、及び操舵速度Vを読み込み、操舵トルクTと電流指令値のコラム軸換算トルクTec(Tec=I×Kt ×G)との和P(P=T+Tec)を演算(P11、12)、値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)か否かを判定し、(P<Tfc)の場合はモータ電流零と見なせる状態が検出されたものと判定、その時点で検出されたモータ電流検出値iをオフセット補正値としてオフセット誤差の補正演算を行う(P13、15)。値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)でない場合はオフセット誤差の補正演算を中止する(P16)。
(もっと読む)
電動機の脈動抑制装置および電動機の脈動抑制方法
【課題】システム同定モデル誤差を推定することができる電動機の脈動抑制装置を提供する。
【解決手段】インバータのベクトル制御により駆動される電動機(実プラントPn)の軸トルクTnに、トルクリプル補償電流指令値から軸トルク検出値までの周波数伝達関数の逆関数を乗算して外乱トルクを推定する周期外乱オブザーバPDOと、トルクリプル抑制制御開始直前の初期状態時の軸トルクTnとトルクリプル抑制制御開始後に十分トルクリプルが打ち消された最終状態時に、前記PDOにより推定された外乱推定値dI^nを外乱とみなしシステム同定モデルP^nから推定した軸トルク推定値T^nとを比較してシステム同定モデル誤差ΔPnを求める誤差推定器100と、前記誤差ΔPnを格納するメモリー110とを備え、メモリー110内の誤差ΔPnによってPDOのシステム同定モデルP^nを補正する。
(もっと読む)
温度推定装置及び温度推定方法
【課題】モータを備える電子機器を構成する機器構成部材の温度の推定精度を向上させることができる温度推定装置及び温度推定方法を提供する。
【解決手段】温度推定部53は、モータ20への入力電力Pinとモータ20からの出力電力Poutとの差分に基づき、モータ20の発熱エネルギ速度Einを演算する発熱エネルギ演算部533と、対象部材の前回の温度推定値Tm(n−1)と雰囲気温度Tfとの差分と、対象部材の熱特性を示す熱係数とに基づき、対象部材からの放熱エネルギ速度Eoutを演算する放熱エネルギ演算部535と、発熱エネルギ速度Einと放熱エネルギ速度Eoutとの差分とに基づき対象部材の温度上昇速度ΔTm(n)を演算する温度上昇量演算部536と、温度上昇速度ΔTm(n)と前回の温度推定値Tm(n−1)とに基づき対象部材の今回の温度推定値Tm(n)を演算する温度推定値演算部537と、を備えている。
(もっと読む)
モータ駆動制御装置、モータ駆動制御方法及びプログラム
【課題】トルクの検出結果をモータの駆動に反映する制御を行うにあたり、トルクの検出を簡単に実現することができるモータ駆動制御装置、モータ駆動制御方法及びプログラムを提供する。
【解決手段】物体を駆動させるモータと、モータにより駆動された物体に加圧されることでモータのトルクを検出するトルク検出手段と、トルク検出手段による検出結果に基づいてモータの駆動を制御する制御手段と、を有し、トルク検出手段は、物体の駆動範囲の端部に設けられている。
(もっと読む)
モータの制御装置、及びモータの制御方法
【課題】モータ内におけるロータの位置を推定せずに、コンプレッサの振動及び騒音を低減できるモータの制御装置及びモータの制御方法を提供する。
【解決手段】制御装置は、周期的に変動する負荷トルクを有する負荷を駆動するモータを指令回転数で動作させるように制御するモータの制御装置であって、前記モータを駆動する駆動部と、前記駆動部により前記モータを駆動する際にモータ巻線に流す相電流を検出する検出部と、前記検出部により検出された相電流に応じた値の変動成分を抽出する抽出部と、前記抽出部により抽出された前記値の変動成分に基づいて、前記負荷トルクの変動特性を推定する推定部と、前記推定部により推定された負荷トルクの変動特性を用いて、前記駆動部の制御信号を生成する制御部とを備え、前記駆動部は、前記制御部により生成された制御信号に従って、前記モータを駆動する。
(もっと読む)
制御装置
【課題】回転電機の応答遅れが伝達トルク振動の周波数に対して無視できない領域においても、十分な制振効果が得られる制御装置が求められる。
【解決手段】伝達トルク振動を打ち消すトルクを回転電機に出力させる制御装置であって、回転速度振動を抽出する回転振動抽出部と、トルク振動周波数を算出する振動周波数算出部と、位相遅れ回転速度振動を算出する位相遅れ回転振動算出部と、回転速度振動及び位相遅れ回転速度振動を固定座標系で表す固定座標系設定部と、回転速度振動及び位相遅れ回転速度振動を回転座標変換する回転座標変換部と、フィードバック値を算出する回転座標系フィードバック制御部と、フィードバック値を固定座標変換する固定座標変換部と、打消トルク振動の指令値を生成する打消トルク制御部と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、実際のモータの抵抗と算出されるモータの抵抗とが乖離することを抑制することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、抵抗マップによりモータ抵抗Rmを算出する。モータ電流とモータ電圧とに基づいて推定誘起電圧を算出する。そして、推定誘起電圧が、電流の大きさに応じて設定される判定値以下の旨判定されるとき、モータ抵抗(推定モータ抵抗Rma)を算出し、この推定モータ抵抗Rmaに基づいて抵抗マップを更新する。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】誘導電動機の回転速度を把握し、その回転速度よりトルク指令値を演算した後、そのトルク指令値で誘導電動機を制御することでトルクモータと同等の回転速度−トルク特性が得られるようにすることができる誘導電動機の制御装置又は制御方法を提供する
【解決手段】誘導電動機の制御装置10は、基本トルク指令値と誘導電動機106の検出速度又は速度推定部112からの推定速度とからトルク指令値を演算するトルク指令値演算部18と、トルク指令値に基づいて、トルク電流指令値を演算するトルク電流指令値演算部19とを備える。
(もっと読む)
ロボット駆動テンドンに張力を付与するためのシステムおよび方法
【課題】ワイア駆動において、高張力を少ない電力で実現すること。
【解決手段】テンドン張力付与システムは、近位端および遠位端を備えるテンドンと、アクチュエータと、モーターコントローラとを含む。アクチュエータは、ドライブスクリューおよびモーターを含むことができ、また、テンドンの近位端に連結され、電流に応答してテンドンに張力を付与するように構成される。モーターコントローラは、アクチュエータに電気的に連結され、テンドンにストール張力が達成されるまで、第1の大きさを備える電流をアクチュエータに提供するように構成される。また、モーターコントローラは、ストール張力の達成に続いてアクチュエータにパルス電流を提供するように構成される。パルス電流の大きさは、第1の大きさよりも大きい。モーターコントローラはさらに、パルス電流の終了に続いて、モーターを安定状態保持電流に戻すように構成される。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10では、トルク軸電圧が印加されているにも関わらず、トルク軸電流が第1閾値以下の状態において、相間電圧がゼロボルト近傍になっている組合せの相以外の相を異常相として検出する。
(もっと読む)
1 - 20 / 193
[ Back to top ]