
Fターム[5H505BB04]の内容
交流電動機の制御一般 (51,584) | 目的 (3,865) | 騒音、振動を低減するもの (475)
Fターム[5H505BB04]に分類される特許
1 - 20 / 475
交流モータの制御装置
駆動装置
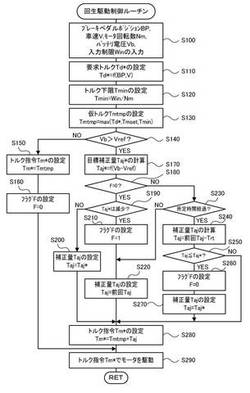
【課題】電動機を含む駆動系の共振の発生を抑制しつつ二次電池を適正使用する。
【解決手段】バッテリ電圧Vbがバッテリの適正な使用範囲における電圧上限値としての補償電圧Vrefを超えているときには、バッテリ電圧Vbが補償電圧Vref以下になるようフィードバック制御における補正量として目標補正量Taj*を計算し(S170)、計算した目標補正量Taj*を基本的には補正量Tajとしてモータトルク指令Tm*を設定する際に用い、目標補正量Taj*が減少したときには、モータを含む駆動系の共振周波数の周期とは異なる時間として予め定められた所定時間に亘って、目標補正量Taj*が減少する前の値を補正量Tajとして保持してモータトルク指令Tm*を設定する際に用いる(S220,S230)。これにより、モータを含む駆動系が共振するのを抑制することができると共にバッテリを適正使用することができる。
(もっと読む)
モータ駆動装置

【課題】直流電源から電力供給を受けるモータ駆動装置において、1パルス制御の実行中に、直流電源に流れる電流に含まれるリップルを抑制することのできるモータ駆動装置を提供することを目的とする。
【解決手段】直流電源3から直流母線を介して入力される直流電力を三相交流電力に変換してIPMモータ8に出力するインバータ2と、電気角1周期の間に、各相に対応するスイッチング素子に対して正負1パルスの矩形波電圧をゲート駆動信号として印加する1パルス制御モードを有するインバータ制御装置10とを備え、インバータ制御装置10は、1パルス制御モードを実行する場合に、矩形波電圧の立ち上がり時および立ち下がり時において、所定の位相角幅でデューティを徐々に増加または減少させるモータ駆動装置1を提供する。
(もっと読む)
モータ制御装置
【課題】 少ないメモリ容量のトルク補正データで、負荷トルク変動および発生トルク変動を抑制するとともに、モータをより平滑に駆動し、モータを内蔵した圧縮機の振動および騒音を抑制することができるモータ制御装置を提供する。
【解決手段】 補正データ作成部21は、回転位置検出部19によって更新された回転位置情報に基づいて、補正用正弦波データテーブル20から、負荷トルク変動補正データとと発生トルク変動補正データとを読み出し、読み出した発生トルク変動補正データをトルク定数の周期変動成分kとする。そして、トルク定数の周期変動成分kから、発生トルク変動補正データicを求め、負荷トルク変動補正データiと発生トルク変動補正データicとを合算し、合算したトルク変動補正データをPWM作成部18に送る。
(もっと読む)
交流電動機の制御装置
【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
電力変換装置
【課題】エンジン発電機による電動機駆動システムにおいて、電力変換器の高調波や直流電圧変動の影響によって、d軸とq軸の電圧外乱による電流脈動の強めあい現象により軸振動が増加し、dq軸間干渉の影響により振動やd軸電流が増加する恐れがある。
【解決手段】エンジン発電機システムの電力変換器105において、発電機104の回転子磁束方向のd軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにd軸電圧調整手段117により発電機104を制御するためのd軸電圧Vd*をΔVd*調整し、さらに、q軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにq軸電圧調整手段118によりq軸の電圧Vq*をΔVq*調整する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びに電動パワーステアリング装置
【課題】CPUに大きな演算負荷を掛けることなく、IPMモータのトルクリプルを低減可能なモータ制御方法・装置を提供する。
【解決手段】IPM型ブラシレスモータ3の制御装置50は、最大トルク制御による巻線電流値を示す基本波電流を算出する基本電流算出部52と、電流センサ64にて検出した相電流値に基づいて、マグネットトルクによるトルクリップルを相殺する第1高調波成分Bsin6(θ+β)と、リラクタンストルクによるトルクリップルを相殺する第2高調波成分Asin6(θ+α)とを算出する補正成分算出部59と、相電流と第1及び第2高調波成分のパラメータA,B,α,βとの関係が格納された補正マップ58と、第1及び第2高調波成分を基本波電流に重畳して供給電流を補正し電流指令値Id’,Iq’を作成する電流補正部60と、を有する。
(もっと読む)
電力変換装置
【課題】電力変換装置において、直流リンク電圧の脈動に起因して生ずるモータの振動や騒音を抑制する。
【解決手段】脈動成分を有する直流リンク電圧(vdc)を交流に変換して永久磁石同期電動機(7)に出力するインバータ回路(4)を設ける。ベクトル制御によってインバータ回路(4)を制御し、基本電圧ベクトルがゼロベクトル(モータ端子電圧がゼロとなる電圧ベクトル)を含まない制御状態においては、脈動に応じて永久磁石同期電動機(7)のd軸電圧ベクトルとq軸電圧ベクトルの2つの電圧ベクトルの合成電圧ベクトル(V0)のq軸から見た位相を脈動させる制御部(5)を設ける。
(もっと読む)
ブラシレスモータ用制御装置およびそれを備えた洗濯機
【課題】簡単、安価な構成および簡単な演算での回転位置センサの取付誤差を補正して、振動、騒音を低減できるブラシレスモータ用制御装置およびそれを備えた洗濯機を提供する。
【解決手段】ブラシレスモータ用制御装置5は、ホールセンサ55u,55v,55wの出力に基づいて、複数のホールセンサ55u,55v,55wの複数の間隔データを得ると共に、複数の間隔データの平均値を求める誤差検出部80とを備える。上記複数の間隔データおよび平均値はセンサ誤差メモリ部65に記憶される。センサ誤差補正部66は、上記間隔データおよび平均値に基づいて、ホールセンサ55u,55v,55wの間隔のズレを補正する。これにより、角速度推定部67は、ホールセンサ55u,55v,55wの間隔のズレを補正した結果を示す信号に基づいて、ブラシレスモータ4のロータの回転速度を正確に求めることができる。
(もっと読む)
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
モータ制御装置、圧縮機およびヒートポンプ装置
【課題】実際の負荷トルクの変動態様に一層一致するようにトルク変動を補償する。
【解決手段】電流演算手段は、モータの巻線電流に基づいてd軸電流およびq軸電流を求める。速度制御手段は、回転速度が指令回転速度に一致するように指令d軸電流および指令q軸電流を生成する。電流制御手段は、d軸電流およびq軸電流が指令d軸電流および指令q軸電流に一致するように制御する。トルクデータ演算手段は、モータの回転角度に応じて記憶手段から基準負荷トルクデータを読み出し、その基準負荷トルクデータからゼロ点設定値を減算するとともにゲインを与えた負荷トルクデータを求める。変化傾向判断手段は、速度変動幅演算手段が求める回転速度の変動幅の変化傾向を判断する。ゲイン調整手段は、回転速度の変動幅が減少傾向であると判断されるようにゲインの値を調整する。補正手段は、負荷トルクデータをモータのトルク定数で除算した電流に基づいて指令q軸電流補正値を演算し、その指令q軸電流補正値により指令q軸電流を補正する。
(もっと読む)
回転機の制御装置
【課題】d軸電流フィードバック制御部32,q軸電流フィードバック制御部34とdn軸電流フィードバック制御部44,qn軸電流フィードバック制御部46とで干渉を生じ、ひいては制御が収束しないおそれがあること。
【解決手段】dn軸電流フィードバック制御部44,qn軸電流フィードバック制御部46では、実電流id,iqの高調波成分を高調波指令電流Σidkr,iqkrにフィードバック制御する。d軸電流指令値補正部24,q軸電流指令値補正部26では、基本波指令電流idr,iqrに高調波指令電流Σidkr,iqkrが加算される。d軸電流フィードバック制御部32,q軸電流フィードバック制御部34では、基本波指令電流idr,iqrおよび高調波指令電流Σidkr,iqkrの和と実電流id,iqとの差をゼロにフィードバック制御する。
(もっと読む)
電動コンプレッサ
【課題】電動コンプレッサの効率の低下を抑えつつ静粛性を高めること。
【解決手段】駆動制御部11は、信号波と搬送波とからPWM信号を生成し、駆動部12は、PWM信号による制御に従ってパワー素子13を駆動し、パワー素子13は、駆動部12の制御に従って、蓄電池2から供給される直流電流を通電または遮断し、電動モータ21は、パワー素子13から供給される交流電流によって回転し、スクロール部22を駆動させ、スクロール部22は、電動モータ21により駆動されて冷媒を圧縮する。駆動制御部11は、信号波と搬送波とからPWM信号を生成する際に、PWM信号の搬送波周波数をスペクトラム拡散する。
(もっと読む)
モータ制御装置及びモータ駆動システム、並びにモータ制御方法
【課題】モータの制御を不安定にすることなく、モータを駆動するための電力に重畳する基本波成分を除去する、ことを目的とする。
【解決手段】モータ制御装置2は、3相/2相変換部12によって、電流センサ7によって検出された3相交流測定電流を2相交流測定電流へ変換し、2相測定交流電流に重畳する基本波成分を含む周波数帯域を阻止帯域とし、交流モータ4の回転数に基づいて該阻止帯域が変化するノッチフィルタを有する可変ノッチフィルタ部13によって、該阻止帯域の周波数成分を減衰させる。そして、モータ制御装置2は、電流PI制御部14、及び極座標/3相変換部15によって、交流モータ4を駆動させる3相交流電力指令値を、可変ノッチフィルタ部13から出力された2相交流測定電流と電流指令値に基づいて生成する。
(もっと読む)
交流電動機の制御装置
【課題】過渡電圧飽和に起因して生じ得る電動機の不安定現象を抑制すること。
【解決手段】交流電動機の制御装置は、速度指令を生成する位置制御器と、電流指令を生成する速度制御器と、電圧指令を生成する電流制御器と、q軸電圧方程式の過渡電圧成分に相当するq軸電圧飽和量ΔVqを算出するdi/dtリミッタ部と、q軸電圧飽和量ΔVqを用いて位置指令修正量ΔPを生成する飽和量F/B部105と、を備える。また、この飽和量F/B部105は、q軸電圧飽和量ΔVqを通過させ、その出力の換算値を位置指令修正量ΔPとして位置制御器の入力側にフィードバックするLPF121と、電動機の電気回路時定数の逆数相当値をLPF121の帯域を決定するフィルタ定数ωとしてLPF121に設定する帯域設定器122と、を備える。
(もっと読む)
駆動信号生成回路
【課題】処理負荷を抑制しつつモータの回転を安定化させることができる駆動信号生成回路を提供する
【解決手段】駆動信号生成回路は、電流検出部と、d軸電流及びq軸電流を算出する算出部と、三相モータの回転速度を示す速度信号と、三相モータの目標回転速度を示す目標信号とに基づいて、q軸電流の第1基準値を示す基準信号出力部と、d軸電流の電流値及び第2基準値の誤差に応じた第1制御信号出力部と、q軸電流の電流値及び第1基準値の誤差に応じた第2制御信号出力部と、三相モータを駆動する駆動回路に対し、第1及び第2制御信号に基づいて、d軸電流が第2基準値となり、q軸電流の電流値が第1基準値となるような駆動信号を出力する駆動信号出力部と、三相モータの回転速度が所定の回転速度となった後に、第2制御信号に基づいて、第2制御信号のリップルが小さくなるよう検出出力を調整する調整部と、を備える。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
1 - 20 / 475
[ Back to top ]