
Fターム[5H505CC02]の内容
交流電動機の制御一般 (51,584) | 電源 (3,035) | 直流電源を用いるもの (1,926) | 電池を用いるもの (1,375)
Fターム[5H505CC02]の下位に属するFターム
太陽電池を用いるもの (10)
2次電池を用いるもの (983)
Fターム[5H505CC02]に分類される特許
21 - 40 / 382
回転電機制御装置
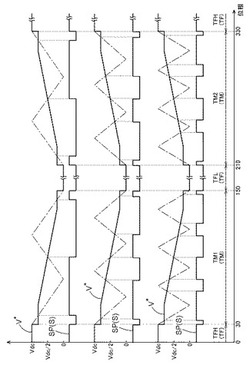
【課題】2相変調によりインバータをスイッチング制御する際にも安定した3相交流が励起されるように、2相変調パルスを生成する。
【解決手段】3相の内の少なくとも1相を所定の固定期間TFの間ハイ状態又はロー状態に固定して、他相を変調する2相変調によりインバータをスイッチング制御する2相変調パルスSPを生成する2相変調パルス生成部は、固定期間TFを回転電機の回転に同期させて固定パルスを生成すると共に、固定期間TF以外の期間TMではパルス幅変調により変調パルスを生成する。
(もっと読む)
インバータ制御装置および車両

【課題】変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるようにする。
【解決手段】インバータ制御装置60は、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する。変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
(もっと読む)
インバータ制御装置および電力変換システム
【課題】所定期間内に加速や減速等のような回転数の変動が生じる場合であっても、従来より正確に角度補正ができるようにする。
【解決手段】インバータ制御装置60は、レゾルバ41(第1角度検出器)によって出力される回転電機40の回転角度に関する信号情報に基づいて理想角度と回転角度との誤差を補正する誤差補正手段67と、レゾルバ41によって出力される信号情報に基づいて基準角度θsを検出する基準角度検出手段66と、基準角度検出手段66によって検出される基準角度θsに基づいて検出角度θdとの誤差を補正する基準となる基準周期Tsを決定する基準周期決定手段68とを有する。誤差補正手段67は、基準周期決定手段68によって決定される基準周期Tsに基づいて理想角度を推定し、推定した理想角度とレゾルバ41によって出力される信号情報に基づいて検出される検出角度θdとの誤差を補正する。
(もっと読む)
モータドライバ及びこれを用いた車両
【課題】モータドライバの入力信号が異常時にモータを停止するか、フルスピードで回転するかを選択できるようにしたモータドライバ及びこれを用いた車両を提供する。
【解決手段】モータドライバは、制御信号VTH、PWMに基づいてモータのトルクまたは回転速度を可変制御する制御部103と、前記制御信号の異常時に前記モータを選択信号MODESELに応じた動作状態とするように前記制御部に指示S1、S2を送る出力モード選択回路108bと、を有する。
(もっと読む)
回転機の制御装置
【課題】インバータの出力電圧ベクトルのノルムをフィードバック補正するものにあって、このフィードバック補正精度が低下するおそれがあること。
【解決手段】推定トルクTeを要求トルクTrにフィードバック制御するための操作量としての位相δと、電気角速度ωおよび要求トルクTrに応じて開ループ制御によって定まる基本ノルムVn1とに基づき、操作信号生成部40では、インバータの操作信号を生成する。ここで、基本ノルムVn1は、モータジェネレータを流れる電流の位相を指令電流idr,iqrの位相にフィードバック制御するための操作量としての補正量ΔVnによって補正される。指令電流idr,iqrは、基本的には、最小電流最大トルク制御を実現可能なものに設定されつつも、そのベクトルノルムが規定値となることで、この規定値を維持するように設定変更がなされている。
(もっと読む)
回転機の制御装置
【課題】インバータIVの出力電圧ベクトルについての開ループ操作量(基本ノルムVn1)を設定するものである場合、モータジェネレータ10の永久磁石の磁束の異常の有無を基本ノルムVn1等からは診断することができないこと。
【解決手段】補正量算出部34では、指令電流設定部32によって設定されたd軸の指令電流idrと実電流idとの差に基づき、基本ノルムVn1の補正量ΔVnを算出する。補正部36では、基本ノルムVn1を補正量ΔVnにて補正することで最終的なノルムVnを算出する。操作信号生成部38では、インバータIVの出力電圧ベクトルのノルムをノルムVnに制御する。補正量ΔVnが負であって且つその絶対値が規定値以上である場合、永久磁石の磁束が減少する異常が生じたと診断する。
(もっと読む)
インバータ制御装置およびインバータ制御システム
【課題】従来よりもインバータを操作する操作信号の分解能を相対的に維持または向上できるインバータ制御装置およびその制御システムを提供する。
【解決手段】制御装置60(インバータ制御装置)は、回転機40に対する要求トルクT*と実際に検出される検出トルクTとの偏差に基づいてフィードバック制御を行って位相指令値P*を出力するPI制御部62(フィードバック制御手段)と、回転機40の回転に伴ってレゾルバ41(回転センサ)から出力されるSIN検出信号Ss,COS検出信号Sc(センサ信号)に基づいてインバータ20を操作する操作信号Spを生成する操作信号生成手段66と、センサ信号の角度情報を所定数で逓倍する信号逓倍手段68とを備える。操作信号生成手段66は、信号逓倍手段68によって角度情報が逓倍されたセンサ信号に基づいて操作信号Spを生成する。
(もっと読む)
電源装置及びその電源装置を備えた電動工具
【課題】インバータを備えた電源装置であって、電源装置の主要装置であるインバータを大型化させずに、位相制御によるモータ回転速度制御機能を備えた電動工具であっても駆動可能とする。
【解決手段】電源装置1は、電池パック5からの直流電力を交流電力に変換して出力するインバータ2と、インバータ2の出力波形を変換する変換アダプタ3のインバータ2への接続状態に応じてインバータ2の出力波形を制御するマイコン28と、を備えたことを特徴としている。
(もっと読む)
電子装置
【課題】直流電源の電圧が変化しても、抵抗回路が異常であるか否かを正しく判定することができる電子装置を提供する。
【解決手段】制御回路13は、抵抗電圧検出回路131と、高電圧バッテリ電圧検出回路132と、マイクロコンピュータ135とを備えている。マイクロコンピュータ135は、高電圧バッテリ電圧検出回路132の検出した高電圧バッテリB10の電圧に基づいて、予め設定されている第1及び第2異常判定閾値の値を変更する。そして、抵抗電圧検出回路131の検出した抵抗121の電圧を変更した第1及び第2異常判定閾値と比較し、抵抗回路12が異常であるか否かを判定する。高電圧バッテリB10の電圧が変化しても、そのため、第1及び第2異常判定閾値を適切な値に変更することができる。従って、高電圧バッテリB10の電圧が変化しても、抵抗回路12が異常であるか否かを正しく判定することができる。
(もっと読む)
回転機の制御装置
【課題】永久磁石を備えるモータジェネレータ10の減磁の有無を判断するための処理手段を適合するに際し、その工数が多くなること。
【解決手段】モータジェネレータ10は、クラッチC1を介して駆動輪14に機械的に連結されて且つクラッチC2を介してエンジン16に機械的に連結されている。車両の起動スイッチがオンされた直後、クラッチC1,C2を解除した状態において、電流フィードバック制御によってモータジェネレータ10のトルクを制御し、この際の実際のトルクが要求トルクを下回ることに基づき、永久磁石の磁束が減少したと判断する。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を行うものにあって、スイッチング状態の切り替えに起因して制御性が低下するおそれがあること。
【解決手段】操作状態設定部31によって設定される電圧ベクトルと、電流センサ16によって検出される電流に基づき、予測部33では、予測電流ide,iqeを算出する。一方、評価部34では、指令電流idr,iqrと予測電流ide,iqeとの乖離が大きいほど評価が低いとする評価関数Jを用いて、評価の最も高くなる電圧ベクトルViを選択し、操作部26に出力する。操作部26では、選択された電圧ベクトルViとなるようにインバータIVを操作する。スイッチング状態の切り替えがなされてから所定の長さを有する時間に渡って、電流の検出値に代えて前回の予測値を用いる。
(もっと読む)
バッテリ制御装置及び車両
【課題】小型軽量であるバッテリ制御装置、及び当該装置を備える車両を提供する。
【解決手段】バッテリ制御装置1は、外部電源PSから供給される電力により充電が可能なバッテリBの充放電を制御するものであって、バッテリBから供給される直流電力をモータMTの駆動に用いられる交流電力に変換する第1変換と、外部電源PSから供給される交流電力をバッテリBの充電に用いられる直流電力に変換する第2変換とが可能な電力変換回路12と、外部電源PSの接続が行われた場合に、モータMTが有する巻線m1〜m3の結線状態を切り替え、モータMTの巻線m1〜m3を介して外部電源PSを電力変換回路12に接続させる切替器13とを備える。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10の制御量の制御のための電流の振幅が大きくなる状況下、高周波電圧vdhの重畳に伴ってモータジェネレータ10に実際に流れる高周波電流idh,iqhの振動方向に基づき電気角θを推定すると、ノイズが大きくなること。
【解決手段】高周波電圧発生部52の発生する高周波電圧vdhと、モータジェネレータ10を実際に流れる高周波電流idh,iqhとの外積値opは、電気角θの誤差信号として角度推定部56に入力される。角度推定部56では、外積値opをゼロにフィードバック制御すべく電気角θを操作する。高周波電圧発生部52では、要求トルクTrが大きくなるほど高周波電圧vdhの振幅vhを小さくする。
(もっと読む)
回転電機制御装置
【課題】複数のバッテリセルが直列接続されたバッテリ群のコンディションに応じて適切に3レベルインバータを制御し、効率良く回転電機を制御する。
【解決手段】3レベルインバータ60は、正極電圧Pと負極電圧Nと正負両極間電圧が分圧された中間点電圧Mとの3レベルの電圧を交流出力電圧Vu,Vv,Vwとして出力可能であり、中間スイッチSmは、上段バッテリ31及び下段バッテリ32が直列接続されたバッテリ群33の中間接続点と正負両極間電圧の分圧点との電気的接続を開閉可能であり、回転電機制御装置10は、バッテリ群33の少なくとも温度に基づいてバッテリ群33の暖機が必要と判定した場合に、中間スイッチSmを閉じ、上段バッテリ31及び下段バッテリ32をそれぞれ流れる電流値が所定の切替周期以上で交互に偏重されるアンバランスモードで3レベルインバータ60をスイッチング制御する。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】高回転・高電流時に誘起電圧の歪みによる誘起電圧補償誤差が著しく大きくなる場合に、誘起電圧補償誤差を低減させるようにしたモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】3以上の相数nの電動モータ12を駆動するモータ駆動制御装置であって、前記電動モータを駆動する電流指令値を演算する電流指令値演算部82と、前記電動モータのモータ角度を検出するモータ角度検出部13と、前記電動モータのモータ角速度を検出するモータ角速度検出部80と、前記モータ角速度で回転するd−q座標に沿って演算されたd軸電流及びq軸電流値の少なくとも一方と、前記モータ角速度及び前記モータ角度とに基づいて補償用誘起電圧を演算する補償誘起電圧演算部84とを備え、前記電動モータの誘起電圧を前記補償誘起電圧演算部で演算した補償用誘起電圧でフィードフォワード補償する。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、電流指令値が負値からゼロクロス近傍の所定範囲に属する値になった場合には、正値の前記デッドタイム補償量を各相DUTY指令値に加算し、電流指令値が正値からゼロクロス近傍の所定範囲に属する値になった場合には、負値の前記デッドタイム補償量を各相DUTY指令値に加算する。
(もっと読む)
三相交流電動機の駆動制御装置
【課題】位相制御上の要求に対して適切な通電制御を行いつつ、電流の急激な変動を抑える。
【解決手段】モータ駆動制御装置は、三相モータの駆動制御を180°通電モードにより行い、算出した位相角度φ1,φ2によって通電パターンの出力タイミングを進角制御する。位相切り替わりタイミング(時刻t1)において60°以上の位相角度の変化が生じた場合、全相のMOSFETを一時的にOFFにさせ、切り替わり後の位相角度φ2で通電パターンの出力タイミングを進角制御する。
(もっと読む)
ゲート駆動回路
【課題】トランジスタの遮断遅延を抑制し、絶縁ゲート型トランジスタ(IGBT)の保護動作を向上できるゲート駆動回路を提供する。
【解決手段】絶縁ゲート型トランジスタ31のゲートに、相補型の対のトランジスタ41A,41Bを接続し、対のトランジスタ41A,41Bのベースライン42の電流制御により絶縁ゲート型トランジスタ31を駆動するゲート駆動回路25において、トランジスタ41A,41Bのベースライン42に、ターンオン時にベースライン電流で充電されるコンデンサCsと、ターンオフ時にコンデンサCsに充電された電荷を消費すると共に、絶縁ゲート型トランジスタ31のゲート電位上昇によりトランジスタ41Aのベースに供給された電荷を消費する抵抗Rb2とを並列接続した電荷消費回路43Aを設けた。
(もっと読む)
電動機の制御装置
【課題】車両用の昇圧コンバータに流れる電流を所定範囲内に制限すると共に、所定条件における制御遅れを防止することのできる電動機の制御装置を提供する。
【解決手段】電動機の制御装置10は、全体制御を司るコントロールユニット11と、操作者からの運転操作を受け付ける操作部34と、電池12の電池電圧を昇圧する昇圧コンバータ回路20と、交流電圧によって回転する電動機14のため、昇圧された直流電圧を交流電圧に変換するインバータ回路13と、電動機14と、を有している。また、コントロールユニット11は、デューティ比決定手段31と、デューティ比算出手段32と、スイッチング素子制御手段33と、を有している。デューティ比算出手段32は、出力キャパシタから電池へ電流を流すことのできる上アームのデューティ比制御値を、電池の直流電圧に応じてデューティ比決定手段31に設定する。
(もっと読む)
角度検出器付き回転電機を用いた回転制動方法および回転制動装置並びにカメラ雲台
【課題】連続可変調節の容易な粘性感を持つ回転制動特性を、メンテナンスフリーで長期間安定して維持できる回転運動制御装置並びにカメラ雲台を供給する。
【解決手段】N極及びS極が交互となるように複数の永久磁石を回転方向に沿って配列したロータと、該ロータに対抗させて半径方向に突出するティースを円周方向に所定間隔を保って所定数配設したステータコア、及び前記ティースに巻装したコイルを有するとともに、前記ロータの回転角に応じた出力信号を出力する角度検出手段を備えたステータとで構成される回転電機を用いて、前記回転電機の外部に電気接続する回転制動制御手段によって、ロータの回転運動を粘性感を持って減衰制御させる構成とする。
(もっと読む)
21 - 40 / 382
[ Back to top ]