
Fターム[5H505CC02]の内容
交流電動機の制御一般 (51,584) | 電源 (3,035) | 直流電源を用いるもの (1,926) | 電池を用いるもの (1,375)
Fターム[5H505CC02]の下位に属するFターム
太陽電池を用いるもの (10)
2次電池を用いるもの (983)
Fターム[5H505CC02]に分類される特許
121 - 140 / 382
操舵制御装置
【課題】操舵力を発生する電動モータに高出力が要求されるときに、インバータのスイッチング損失を低減することのできる操舵制御装置を提供する。
【解決手段】電動モータ1のPWM制御におけるキャリア周波数を、搬送波生成部28が電動モータ1の回転速度ωに応じて制御する。搬送波生成部28は、電動モータ1を定トルク領域よりも回転速度が高い回転速度領域で駆動するときに、電動モータ1を定トルク領域の回転速度で駆動するときよりもキャリア周波数を低く設定することにより、インバータ13bにおけるスイッチング損失を低減して電動モータ1の出力を向上させる。
(もっと読む)
駆動装置

【課題】要求に応じて三相交流電動機を矩形波制御モードで駆動する。
【解決手段】三相交流電動機としてのモータを矩形波制御モードで駆動する矩形波制御要求がなされたときには、高電圧系の目標電圧VH*を設定してからモータの制御モードを選択するのではなく、即ち目標電圧設定用マップを用いずに、制御モード設定用マップ(例えば図2(2)に示すマップ)と目標駆動点(例えば図2(2)に示す目標駆動点B)とに基づいてモータの実行用制御モードとして矩形波制御モードが選択されるよう高電圧系の目標電圧VH*を設定する。これにより、要求に応じてモータ32を矩形波制御モードで駆動することができる。
(もっと読む)
モータ制御装置および車両システム
【課題】放電抵抗や放電用の追加の回路を設けることなく、コンデンサに蓄えられた電荷を放電することのできるモータ制御装置および車両システムの提供。
【解決手段】モータ制御装置は、電源V1とグランドV2の間に上側トランジスタと下側トランジスタを直列接続したアームを複数並列に接続し、複数のアームの中点をモータコイルの各相の端子にそれぞれ接続したインバータ20と接続され、上側トランジスタと下側トランジスタのスイッチングを制御してモータ40を駆動する。このモータ制御装置は、さらに、バッテリ10との接続が断たれた状態で起動され、すべてのアームに配置された上側トランジスタと下側トランジスタとを交互にオンオフ制御することによって、電源V1とグランドV2の間に配置されたコンデンサ21に蓄積された電荷を、モータコイルで消費させる放電機能を備える。
(もっと読む)
ドライ真空ポンプ用電源装置、及びその運転方法
【課題】電源装置の容量を大きくすることなく、ポンプ内に異物が混入し噛み込み等が発生し、一時的に高トルク運転が必要となった場合でも、簡単な構成で一時的に大きな電動機軸出力を出力させ、噛み込みを解消できるドライ真空ポンプ用電源装置を提供すること。
【解決手段】整流器、平滑コンデンサを備えた直流回路、インバータ回路を備え、交流電源からの交流電力を整流器で直流電力に変換し、直流回路を介しインバータ回路に供給し、インバータ回路で所定周波数の交流電力に変換し、ドライ真空ポンプの駆動電動機に供給するように構成したドライ真空ポンプ用電源装置であって、補助電力回路と、駆動電動機が定格軸出力より大きい軸出力を必要とする場合、補助電力回路から所定のタイミングで直流回路に補助電力を供給し直流回路の電圧又は電流を増大させ、大きい軸出力が不必要となった場合、所定のタイミングで補助電力の供給を停止する切替手段とを設けた。
(もっと読む)
昇降圧コンバータの制御装置およびこれを搭載するハイブリッド車並びに昇降圧コンバータの制御方法。
【課題】高電圧系の電圧が高い状態で電動機の回転数が回路の共振周波数に相当する回転数帯に至らないようにする。
【解決手段】モータMG2の回転数Nm2が昇降圧コンバータやコンデンサなどにより形成されるRLC回路の共振周波数帯に対応するモータMG2の回転数帯(共振回転数帯)より大きな回転数N1未満のときには電圧V1を制限電圧Vlimに設定し、モータMG2の回転数Nm2が回転数N1以上で回転数N2以下のときには電圧V1からインバータの入力最大電圧Vsetまでリニアに増大した電圧を制限電圧Vlimに設定し、モータMG2の回転数Nm2が回転数N2以上のときにはインバータの入力最大電圧Vsetを制限電圧Vlimに設定し、設定した制限電圧Vlimにより要求電圧Vhreqを制限して得られる目標電圧Vh*となるよう高電圧系の電圧VHを制御する。
(もっと読む)
電力変換システム
【課題】コントローラの負荷増加を抑制しつつ、リップル電流の低減を図る。
【解決手段】インバータ30,30aのそれぞれについて、負荷の要求(トルク指令値)に応じて設定される各相の初期変調率指令mu1〜mw1,mu2〜mw2をそれぞれオフセットさせることにより、最終的な各相の変調率指令mu1*〜mw1*,mu2*〜mw2*を生成する。
(もっと読む)
自動車用ブラシレスモータの制御装置
【課題】自動車用ブラシレスモータの各相に流れる電流の検出誤差を補正することができる制御装置を提供する。
【解決手段】イグニッションスイッチのオン時やオフ時、更に、アイドルストップ時、燃料カット時、アイドル運転時などにおいて、ブラシレスモータの出力軸がストッパに突き当たる位置にまで回転させてから、指令電圧を零にして、そのときに電流検出回路で検出された相電流を、前記電流検出回路のオフセット誤差として学習する。そして、電流検出回路で検出された相電流に基づいてブラシレスモータを制御するときに、電流検出回路による検出電流を、前記オフセット誤差分だけ補正する。
(もっと読む)
電力変換装置の制御方法
【課題】複数の電源が出力する直流電力を脈動させずに、電力の配分を行いながらモータを駆動する電力変換器の制御方法を提供する。
【解決手段】第1の直流電源10、及び第2の直流電源11の単位時間当たりの出力電力を指令する電源電力指令値に基づいて、前記各直流電源の最終電力配分指令を生成するステップと、電力変換装置の各相の電圧指令を生成するステップと、最終電力配分指令に各相の電圧指令を加算して、最終的な出力電圧指令を生成するステップとを有する。そして、最終的な出力電圧指令が第1の直流電源の出力電圧未満である場合には、第1,第3スイッチを切り換えて負荷に電力を供給し、最終的な出力電圧指令が第1の直流電源の出力電圧以上である場合には、第2、第3スイッチを切り換えて負荷に電力をする。また、最終電力配分指令を変化させる周期を、電源電力指令値が変化する周期よりも短くする。
(もっと読む)
電動コンプレッサ制御装置
【課題】モータの運転範囲を一律に狭めることなく、モータを脱調により停止させることのない電動コンプレッサ制御装置とする。
【解決手段】モータ指令速度生成部11はエアコンの設定温度と室内温度の基づいてモータ指令速度ωoを生成する。負荷判定部17ではモータトルク演算部15からのモータトルクと過負荷判定閾値設定部16で設定された過負荷判定閾値Tzとを比較してモータMの負荷状態を判定する。指令速度補正部12はモータが過負荷であるときはモータ指令速度を減少させて最終指令速度ωtとし、これに基づいてモータ制御部13がモータを駆動する。低速領域において、過負荷判定閾値Tzはモータトルクの変動速度が小さくてモータの回転速度減少後のオーバーシュートが小さいほど高く設定され、高速領域では変動速度に関わらずモータの回転速度に対する限界トルクの変化にそわせて設定される。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】モータに共振が発生することを抑制することができるモータ制御装置及びモータ制御方法を提供する。
【解決手段】モータ20のロータ2の回転速度を検出し、検出された回転速度でモータ20に発生する周期的な振動の振動周波数を導出し、導出された振動周波数が所定の共振周波数α、βの何れかである否かを判定し、振動周波数が共振周波数α、βの何れかである場合、共振を低減させるように複数相の巻線6に印加される電圧を補正する。
(もっと読む)
電動機の制御装置
【課題】電動機が有する2重回転子の相対位相角を変更する位相変更機構に作動流体を導入する装置の元圧が変化しても、2重回転子の相対位相角が可変閾位相角に到達したことを正確に判断可能な電動機の制御装置を提供すること。
【解決手段】回転軸の周囲に同心円状に設けられた第1回転子及び第2回転子と、第1回転子及び第2回転子の周方向の相対変位角を変更する位相変更機構と、を備えた永久磁石界磁型の電動機の制御装置は、位相変更機構に導入する作動流体の流体圧によって位相変更機構を駆動する位相変更機構駆動部と、位相変更機構駆動部が位相変更機構に導入する作動流体の流体圧を検出する圧力検出部と、圧力検出部の検出結果の直流成分を導出する直流成分導出部と、直流成分導出部が導出した直流成分を微分した値の極性が所定時間範囲内で変化した変極回数に応じて、相対位相角が可変閾位相角に到達したか否かを判断する判断部とを備える。
(もっと読む)
同期モータの制御装置
【課題】低速から高速までの広範囲な運転領域において高トルクと高回転を両立した、高効率な同期モータの制御装置を提供する。
【解決手段】ステータに第1の三相コイルUH、VH、WHおよび第2の三相コイルUL、VL、WLを有する同期モータ7と、これらの三相コイルに交流出力を個別に印加する第1および第2のインバータ回路3、4と、バッテリBと、バッテリBとインバータ回路3、4の間に設けられたメインコンタクタ5と、インバータ回路3、4間に設けられたコンタクタ6と、外部信号の入力に基づいて、メインコンタクタ5およびコンタクタ6の制御ならびにインバータ回路3、4の出力の制御を行うことにより、同期モータ7を、第1および第2のインバータ回路4の両方の交流出力で駆動させる第1の駆動モードと、第1のインバータ回路3のみの交流出力で駆動させる第2の駆動モードとで駆動させる制御部2と、を備えた。
(もっと読む)
車両用電力変換装置および電動車両
【課題】駆動モード時に低温時の耐電圧低下に制限されることなくインバータ回路を駆動することができる、信頼性の高い車両用電力変換装置の提供。
【解決手段】車両用電力変換装置は、上アーム用半導体スイッチング素子および下アーム用半導体スイッチング素子を相毎に備えて回転電機を駆動するインバータ回路144と、上下アーム間に第1の電圧Vbを印加してトルク指令に基づくスイッチング動作を行わせる駆動モード、および、上下アーム間に第1の電圧Vbよりも低い第2の電圧Vcを印加してスイッチング動作を行わせる暖機モードの、いずれか一方を選択してインバータ回路144を制御する制御回路172を備える。そして、車両起動信号が入力されると、暖機モードでインバータ回路144を制御し、IGBT328,330を暖機する。その結果、駆動モード時における耐圧オーバーが防止され、信頼性の向上を図ることができる。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、矩形波電圧位相制御モードから過変調電流制御モードに切り替わる際の電流のオーバーシュートを抑制することである。
【解決手段】回転電機18,20に対する制御部30は、過変調電流制御モジュール34、矩形波電圧位相制御モジュール36、矩形波電圧位相制御モードから過変調電流制御モードへのモード切替の際の電流偏差が予め定めた閾値偏差を超えるか否かを判断する電流偏差判断モジュール40、その判断が否定の場合に通常条件の下の電流フィードバック制御を実行し、判断が肯定の場合に、電流偏差の時間変化について予め定めた所定の電流偏差変化率以下の範囲で電流フィードバック制御を行う切替時制御モジュール42を含んで構成される。
(もっと読む)
モータ制御装置
【課題】低コストの構成により、モータの回生による制動力の調整をすることができるモータ制御装置を提供する。
【解決手段】モータ制御装置1は、インバータ回路4、制御回路13、及び、回生スイッチ(入力スイッチ)111を備える。制御回路13は、回生モードにおいて、回生スイッチ111から入力されるオンとオフとに対する時間間隔に応じて、インバータ回路4のPWM制御のデューティ比を設定することにより、モータ5が発生する交流電圧を直流電圧に変換させて、電源装置2に充電する。
(もっと読む)
駆動装置
【課題】インバータが故障したときでも二次故障を生じない範囲で電動機を駆動する。
【解決手段】モータに印加される矩形波電圧の目標電圧位相ψtmpが位相リミッタψmin,ψmaxのいずれかになって異常カウンタC1がインバータ異常判定閾値C1ref以上に至ったときにインバータに異常が生じていると判定し(S100〜150)、この状態でモータ温度tmが所定温度trefを超えて異常カウンタC2が駆動系異常判定閾値C2refに至ったときに駆動系に異常が生じていると判定する(S160〜S210)。これにより、インバータが故障したときでもモータの不可逆減磁などの二次故障が生じない範囲でモータを駆動することができる。
(もっと読む)
エンジンスタータ/発電機のための方法およびシステム
エンジンスタータ/発電機のための方法およびシステムが提供される。スタータ/発電機システムには、三相かご形誘導機と、該三相かご形誘導機に電気結合された三相インバータ/コンバータが含まれる。スタータ/発電機システムには、さらに、三相インバータ/コンバータに電気結合された双方向DC−DCコンバータと、始動モードの間、誘導機に対する複数の相電流から、センサを使用することなく回転子角度を決定するように構成されたディジタル制御基板が含まれる。始動モードの間、ディジタル制御基板内の論理は、スタータ/発電機システムを誘導電動機、三相DC−ACインバータおよびDC−DC昇圧コンバータの組合せに構成し、また、発電モードの間、ディジタル制御基板内の論理は、スタータ/発電機システムを誘導発電機、三相AC−DCコンバータおよびDC−DCバックコンバータの組合せに構成する。 (もっと読む)
電動機の制御装置及びこれを搭載する車両並びに電動機の過熱の報知方法
【課題】電動機の負荷率に応じて電動機が過熱に至る報知をより適正に行なう
【解決手段】要求負荷率Pm*が大きいときにはモータ温度Tmが比較的低い温度でも過熱に至ると判定すると共に要求負荷率Pm*が小さいときにはモータ温度Tmが比較的高い温度でも過熱に至らないと判定するモータ過熱警告判定用マップに対して要求負荷率Pm*とモータ温度Tmとが過熱警告範囲に属するか否かを判定し(S160,S170)、過熱警告範囲に属するときに過熱警告ランプを点灯する(S190)。これにより、要求負荷率Pm*に応じたモータ温度Tmを用いてモータが過熱に至ることを報知する過熱警告ランプを点灯することができる。
(もっと読む)
電力変換装置
【課題】分圧点の電圧変化を抑制する。
【解決手段】コントローラ4は、制御周期毎に、補助スイッチンング回路のそれぞれを通過する電荷量に基づいて、補助スイッチング回路側から分圧点側へ通過する電荷量と、分圧点側から主スイッチング回路側に通過する電荷量とを比較する。そして、コントローラ4は、この比較結果に基づいて、補助スイッチング回路を通過する電荷量が最大となる補助スイッチング回路についてスイッチング動作の動作期間を短く補正する。
(もっと読む)
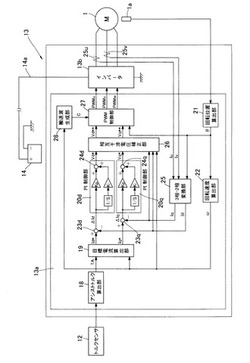
電動機の磁極位置推定装置
【課題】演算負荷の増大を抑制しつつ、磁極位置の推定精度の低下を防止する。
【解決手段】電動機の磁極位置推定装置は、モータ11が発生する誘起電圧が回転速度によって変化することを利用してdq座標系に対するγδ座標系の位相差Δθeを推定する磁極位置誤差推定部46と、位相差Δθeから磁極位置推定値θeを演算する回転速度−磁極位置演算部47とを備え、磁極位置誤差推定部46は、モータ11の簡易的な電圧方程式をキャリア信号の1周期Tsによるサンプリング時間で0次ホールドにより離散化して得た離散時間状態方程式により、モデル電流を算出し、このモデル電流とモータ11に通電される実電流との電流偏差に基づき、位相差Δθeを推定する。
(もっと読む)
121 - 140 / 382
[ Back to top ]