
Fターム[5H505CC04]の内容
交流電動機の制御一般 (51,584) | 電源 (3,035) | 直流電源を用いるもの (1,926) | 電池を用いるもの (1,375) | 2次電池を用いるもの (983)
Fターム[5H505CC04]に分類される特許
41 - 60 / 983
車両
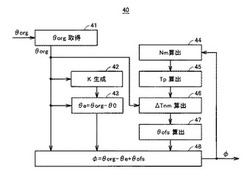
【課題】レゾルバを用いて検出された回転角に含まれる誤差を適切に補正する。
【解決手段】制御装置40は、レゾルバからの電気信号をレゾルバ−デジタル変換回路で変換して得られるレゾルバ検出角θorgを用いてモータの理想回転角θ0を設定し、理想回転角θ0とレゾルバ検出角θorgとの差分の波形を誤差学習値θeとして記憶する(43)。さらに、制御装置40は、実際のモータ回転速度Nmに対応する位相遅れ時間Tpを算出し(45)、位相遅れ時間Tp分だけレゾルバ検出角θorgを理想回転角θ0に沿って変位させた波形を用いて基準信号Kのずれ時間ΔTnmを算出し(46)、ずれ時間ΔTnmから真の回転角と理想回転角θ0とのオフセット量θofsを算出する(47)。制御装置40は、誤差学習値θeおよびオフセット量θofsを用いてレゾルバ検出角θorgを補正する(48)。
(もっと読む)
モータ制御装置

【課題】モータに矩形波電圧を印加するモータ制御装置において、過電流の発生を抑制する。
【解決手段】モータに印加する電圧の位相を変化させてトルクを調整するとともに、モータに印加する電圧波形を矩形波形とPWM波形の間で切り替えてモータを制御するモータ制御装置であって、モータの回転数に応じて電圧位相の下限値を規定する下限値曲線a,c,eを含むマップを備え、モータの回転数Nに応じた電圧位相φvが所定の下限値曲線a,c,e以下となった場合に、モータに印加する電圧波形を矩形波形からPWM波形に切り替える。
(もっと読む)
回転電機の制御装置および制御方法
【課題】総磁束制御の信頼性の低下を防止することができる回転電機の制御装置を得る。
【解決手段】トルク指令とマップ制御指令との関係が記された3次元マップ11を用いて、トルク指令からマップ制御指令を生成するマップ制御電流指令生成部10と、トルク指令と回転電機の回転速度および電機子電流とから、総磁束制御指令を生成する総磁束制御電流指令生成部20と、マップ制御指令と総磁束制御指令との少なくとも位相および大きさの何れか一方を比較し、総磁束制御指令の位相または大きさが、マップ制御指令を基準として所定の範囲を超えた場合に、マップ制御指令を駆動指令として出力するとともに、総磁束制御指令の位相または大きさが、マップ制御指令を基準として所定の範囲内にある場合に、総磁束制御指令を駆動指令として出力する電流指令判定部30とを備えたものである。
(もっと読む)
モータ制御装置
【課題】 バッテリーを1台のみ備えるHEVやEVで、車両走行中であっても、このバッテリーを構成する二次電池のSOCを正確に求めるための二次電池の端子間電圧測定のために、このバッテリーの定電流駆動を行う方法を提供する。
【解決手段】
本発明はモータ制御装置であって、モータの負荷変動により二次電池の充放電電流が変化する第一のモードと、モータの負荷変動に拘わらず、二次電池の充放電電流が所定時間は一定になる第二のモードとのいずれかのモードを設定するモード設定手段と、モード設定手段により設定されたモードと、トルク指令値と、モータ回転数とに基づいて、モータを駆動する駆動信号を生成する駆動信号生成手段とを備える。
(もっと読む)
電動圧縮機制御システム
【課題】空調性能の悪化を最低限に抑え、簡便な方法で電動圧縮機9の回転数制御を実施することで、性能スペックの低い安価な電子回路を使用した圧縮機電子ユニット1内で電動圧縮機9の消費電力制限機能を実現する。
【解決手段】車両空調装置の冷媒を吐出する電動圧縮機9を電池3の電力を用いて駆動するシステムにおいて、電動圧縮機9は、該電動圧縮機9と一体に電動機10の回転数を制御する圧縮機電子ユニット1を有し、車両用空調装置が要求する回転数指令と、電池3の電池電力残量から演算された電力上限値とを上位電子ユニット2から圧縮機電子ユニット1に導く多重通信線8aを有し、圧縮機電子ユニット1内で回転数指令と電力上限値と電動機10が消費する実消費電力とから目標回転数を演算する電力制限制御を実行し、該演算された目標回転数に応じて電動機10の回転数制御を行う。
(もっと読む)
駆動制御システムおよび電動車両
【課題】コンバータにおける損失を低減することが可能な技術を提供する。
【解決手段】本明細書では、バッテリとモータの間に配置されており、直流電圧を昇降圧可能なコンバータと、コンバータのモータ側電圧の目標値を設定する制御装置を備える駆動制御システムを開示する。前記コンバータは、バッテリ側正極線と、モータ側正極線と、共通負極線と、モータ側正極線と共通負極線の間に直列に接続された第1逆導通型半導体スイッチおよび第2逆導通型半導体スイッチと、一端がバッテリ側正極線に接続され、他端が第1逆導通型半導体スイッチと第2逆導通型半導体スイッチの接続部に接続されているリアクトルを備えている。前記制御装置は、前記モータの回生動作時のモータ側電圧の目標値を、基準電圧を下回らないように設定する。前記基準電圧は、第1逆導通型半導体スイッチのオン抵抗損失とスイッチング損失の和が極小値となる電圧である。
(もっと読む)
車両および車両の制御方法
【課題】インバータによりモータジェネレータを駆動して走行が可能な車両において、インバータに含まれるスイッチング素子に短絡故障が生じた場合の車両搬送時に、車両内の機器の二次故障を抑制しつつ車両の移動を可能とする。
【解決手段】車両100は、モータジェネレータ140と、インバータ130と、ECU300とを備える。インバータ130は、各々が上下アームを構成する2つのスイッチング素子を有する三相の駆動アーム131,132,133を含み、蓄電装置110からの直流電力を交流電力に変換してモータジェネレータ140を駆動する。ECU300は、車両100がモータジェネレータ140からの駆動力で自走していない場合に、インバータ130に一相短絡故障が生じたときには、車速に応じてインバータ130のスイッチング状態を変更する。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を用いる場合、スイッチングモードの更新可能タイミングの都度、スイッチングモードを最適なものに変更することが可能であることから、スイッチングモードの切り替え頻度が高くなるおそれがあること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じて、モータジェネレータ10を流れる電流と指令電流id*,iq*との差ベクトルのノルムが閾値rとなるまでの所要時間Tsを予測する。モード決定部34では、所要時間Tsが最も長いものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
回転駆動装置
【課題】装置の小型化を図りつつ、スイッチング素子の短絡故障時にモータジェネレータで発生した逆起電力から装置を保護することができる回転駆動装置を提供する。
【解決手段】回転駆動装置1は、三相交流式のモータジェネレータ2と、このモータジェネレータ2とパワーケーブル3を介して接続された三相式のインバータ4とを備えている。インバータ4は、正共通線7と負共通線8との間に直列接続されたトランジスタ9a,10a、トランジスタ9b,10b及びトランジスタ9c,10cを有している。トランジスタ9a〜9cのコレクタ端子と正共通線7との間にはシャント抵抗14a〜14cが接続され、トランジスタ10a〜10cのエミッタ端子と負共通線8との間にはシャント抵抗15a〜15cが接続されている。シャント抵抗14a〜15cは、ヒューズ機能を有し、所定量以上の電流が流れるとオープン故障を起こすような素子である。
(もっと読む)
車載用回転電機の駆動装置
【課題】電圧変換装置の短絡といった故障モードにおいても、直流電源のバッテリ等の過電流を防止することができ、バッテリの損傷を回避できる車載用回転電機の駆動装置を提供することを目的としている。
【解決手段】駆動装置1は、インバータ4を介してモータ5を駆動制御する回転電機の駆動装置であって、充放電可能なバッテリ2と、バッテリ2の電圧を変換してインバータ4に電力供給する昇圧コンバータ3と、昇圧コンバータ3を迂回するバイパス回路10と、バッテリ2からの電力を昇圧コンバータ3とバイパス回路10とを切り替える切替スイッチ9aおよび9bと、切替スイッチ9a、9bを操作する制御回路7と、バッテリ2から昇圧コンバータ3への電力供給を制御する制御装置8と、を備えている。昇圧コンバータ3の短絡時に昇圧コンバータ3への電力供給を遮断し、バッテリ2の損傷を回避することができる。
(もっと読む)
電子制御装置およびモータ制御装置
【課題】アナログ変換処理の実行周期はアナログ変換処理を行う制御装置内で定められる所定周期ではなく、インバータ等の制御対象に入力される信号と共通のタイミングでアナログ変換処理を行わなければ、電流制御の精度やモータ制御の効率低下を招いてしまう。
【解決手段】電子制御装置内において一定周期で発生する動作開始トリガにより、予め登録されているアナログ信号のアナログ変換処理をシーケンシャルに実行する、第一のアナログ変換機能と、前記電子制御装置外部と共通のタイミングで発生する動作開始トリガにより、予め登録されているアナログ信号のアナログ変換処理をシーケンシャルに実行する、第二のアナログ変換機能と、を備え、前記第一のアナログ変換機能よりも前記第二のアナログ変換機能の処理機能の優先度を高くする。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、回転電機の回転数の急変時に、制御切替を迅速に行うことで、回転電機に過電流が流れることを有効に抑制することである。
【解決手段】回転電機制御システム10は、回転電機(第2モータジェネレータ)14と、回転電機14の所定時間当たりの回転数を測定する回転数センサ34と、制御部32とを含む。制御部32は、回転数の測定結果に応じて、回転電機14の制御方法の切り替えの際に用いる制御切替閾値である制御切替位相を変更する閾値変更部48を有する。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流が大きくなることで、モデル予測制御の制御性が低下すること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じた予測電流ide,iqeを算出する。モード決定部34では、予測電流ide,iqeと指令電流id*,iq*との乖離が小さいものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。ここで、予測部33は、予測電流ide,iqeの予測に用いる電圧方程式における電流の時間微分の係数として、過渡インダクタンスLdt,Lqtを用いる。それらは、電流と電気角速度ωとの積の係数としての定常インダクタンスLds,Lqsとは相違する。
(もっと読む)
電動コンプレッサ
【課題】電動コンプレッサの効率の低下を抑えつつ静粛性を高めること。
【解決手段】駆動制御部11は、信号波と搬送波とからPWM信号を生成し、駆動部12は、PWM信号による制御に従ってパワー素子13を駆動し、パワー素子13は、駆動部12の制御に従って、蓄電池2から供給される直流電流を通電または遮断し、電動モータ21は、パワー素子13から供給される交流電流によって回転し、スクロール部22を駆動させ、スクロール部22は、電動モータ21により駆動されて冷媒を圧縮する。駆動制御部11は、信号波と搬送波とからPWM信号を生成する際に、PWM信号の搬送波周波数をスペクトラム拡散する。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
駆動制御装置、及び、駆動制御方法
【課題】電圧制御方式の切り替え時における電動機の制御性を改善した駆動制御装置、及び、駆動制御方法を提供する。
【解決手段】駆動制御装置は、電動機の駆動制御に用いる第1電圧指令を第1方式で生成する第1領域と、前記駆動制御に用いる第2電圧指令を第2方式で生成する第2領域との境界を前記電動機の回転数とトルク指令値とで表すマップを格納する格納部37と、前記回転数と前記トルク指令値とで決まる前記電動機の動作点が前記境界を含む所定の切替領域内にある場合は、前記第1方式で第1電圧指令を生成するとともに、前記第2方式で第2電圧指令を生成する電圧指令生成部と、前記第2方式から前記第1方式への切り替えが必要な場合は前記第1電圧指令を用いて前記電動機の駆動制御を行い、前記第1方式から前記第2方式への切り替えが必要な場合は前記第2電圧指令を用いて前記電動機の駆動制御を行う駆動制御部30とを含む。
(もっと読む)
駆動装置
【課題】モータの絶縁破壊を抑制する。
【解決手段】正弦波制御や過変調制御(パルス幅変調制御)によってインバータを制御するときで変調率αが閾値αref以上のときには(S120,S130)、正弦波制御や過変調制御(パルス幅変調制御)によってインバータを制御するときで変調率αが閾値αref未満のときや、矩形波制御によってインバータを制御するときの上限電圧VHlim(=VH1)に比して低い上限電圧VHlim(=VH1・β)を設定する(S150)。そして、設定した上限電圧VHlim以下の範囲内で駆動電圧系電力ラインの電圧VHを調節する(S160,S170)。
(もっと読む)
電気自動車の冷却システム
【課題】キャリア周波数に依存してモータの温度が上昇し易くなる状況に備えてモータ温度の上昇を抑制する技術を提供する。
【解決手段】本明細書が提供する冷却システム100は、インバータ2のキャリア周波数を第1周波数から第1周波数よりも低い第2周波数に切り換えるとともに、モータ冷却系60の冷却能力を増大させる。キャリア周波数の切り換え(高周波数から低周波数への切り換え)に連動してモータ冷却系60の能力を増大させることによって、予じめ、実際にモータ10の温度が上昇する前にモータ冷却能力を高めておくことができる。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】回生制御の実行時においてもモータの各相電流値を検出することができるモータ制御装置を提供すること。
【解決手段】マイコンは、三角波δが山となるタイミングTbで上段側の各FETを全てオンにするような制御信号を出力する第1周期C1、及び下段側の各FETを全てオンにするような制御信号を出力する第2周期C2を交互に繰り返すことにより、その回生制御を実行する。そして、この回生制御の実行時、マイコンは、第1周期C1において三角波δが山となるタイミングTbで取得された各電流センサの出力値をオフセット電流値Ix0として、第2周期C2において第1周期C1と同じタイミングTbで取得された補正前電流値Ix1を補正することにより、モータの各相電流値を検出する。
(もっと読む)
41 - 60 / 983
[ Back to top ]