
Fターム[5H505EE32]の内容
交流電動機の制御一般 (51,584) | 電動機の制御方法 (6,264) | 異なる制御装置の組合せ (75)
Fターム[5H505EE32]の下位に属するFターム
一次電圧制御装置との組合せ (15)
二次電圧制御装置との組合せ (1)
巻線切換との組合せ (25)
Fターム[5H505EE32]に分類される特許
1 - 20 / 34
モータ駆動装置、およびこれを用いた機器
モータ制御装置
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
油圧ユニット

【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御する制御部(1)を設ける。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
駆動制御装置、及び、駆動制御方法
【課題】電圧制御方式の切り替え時における電動機の制御性を改善した駆動制御装置、及び、駆動制御方法を提供する。
【解決手段】駆動制御装置は、電動機の駆動制御に用いる第1電圧指令を第1方式で生成する第1領域と、前記駆動制御に用いる第2電圧指令を第2方式で生成する第2領域との境界を前記電動機の回転数とトルク指令値とで表すマップを格納する格納部37と、前記回転数と前記トルク指令値とで決まる前記電動機の動作点が前記境界を含む所定の切替領域内にある場合は、前記第1方式で第1電圧指令を生成するとともに、前記第2方式で第2電圧指令を生成する電圧指令生成部と、前記第2方式から前記第1方式への切り替えが必要な場合は前記第1電圧指令を用いて前記電動機の駆動制御を行い、前記第1方式から前記第2方式への切り替えが必要な場合は前記第2電圧指令を用いて前記電動機の駆動制御を行う駆動制御部30とを含む。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
横磁束機械
【課題】本発明の目的は、単純で経済的なコア構造をもつ横磁束機械装置(TFMA)を提供することである。本発明の他の対象は、インホイールモータやエンジンのクランクシャフトに結合された発電電動機やリニアモーター・ドライブのクランクシャフトの上でリニアコンプレッサのようない可変速用途において、優れたトルク特性をもつTFMAに提供することである。
【解決手段】このTFMAは、積層鉄板をもつコアを採用する。コアは、3D磁束通路を作るために、左斜め部及び右斜め部を有する。斜め部をもつ積層鉄コアを用いる複数の3D構造が、開示される。斜め部を使用することにより、コアはムカデのように見えます。CTFMと呼ばれるムカデのようなTFMは、複数のタイプをもつ。このCTFMのために、複数のモータ構造及び複数の駆動装置も開示される。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
車両
【課題】コンバータおよびインバータを含むモータ駆動回路を備えた車両において、駆動回路の共振に起因する直流電源の過熱を適切に抑制する。
【解決手段】コンバータおよびインバータを含むモータ駆動回路を制御する制御装置は、コンバータの上アームオン制御中(非昇圧中)である場合(S10にてYES)で、かつモータ回転速度Nが共振回転速度領域に含まれる場合(S11にてYES)で、かつ電流Ibの2乗値が許容値以上である場合(S12にてYES)、インバータの矩形制御の実行を禁止する(S13)。一方、上アームオン制御中でない場合(S10にてNO)、モータ回転速度Nが共振回転速度領域に含まれない場合(S11にてNO)、電流Ibの2乗値が許容値未満である場合(S12にてNO)の少なくともいずれかの場合、制御装置は、矩形制御の実行を許容する(S14)。
(もっと読む)
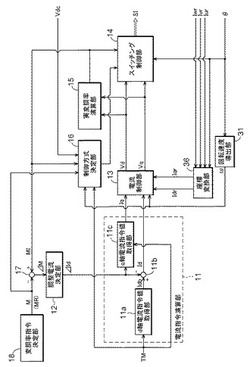
モータ制御装置
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
モータ駆動装置
【課題】スイッチング損失を低減させ、効率の向上を図ることのできるモータ駆動装置を提供することを目的とする。
【解決手段】直流電力を交流電力に変換し、該交流電力をモータに供給するインバータと、インバータを制御するインバータ制御装置とを具備し、前記インバータ制御装置は、180度通電制御する180度通電制御部121と、通電休止期間を設け、通電角を180度未満とし、かつ、その通電期間を1パルスの矩形波で制御する矩形波制御部122と、180度通電制御部121および前記矩形波制御部122のいずれかを選択する選択部とを具備するモータ駆動装置を提供する。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良発生後の継続制御時における操舵フィーリングの向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】制御信号出力部は、二系統の独立したモータコイルに対応して設けられた各駆動回路に対して二系統の独立した制御信号を出力する。また、電力供給の基礎指令Iq*に基づき優先指令Iq*_x及び補完指令Iq*_yを演算することにより、一方の系統について通電不良の発生が検知された場合には、他方の系統に優先指令Iq*_xを振り分けることにより、当該他方の系統に対する制御信号出力を優先する。そして、通電不良の発生相が一相のみであり、且つ基礎指令Iq*の値が優先指令Iq*_xの上限値(Iq_max/2)を超える場合には、通電不良が発生した系統の駆動回路に対し、通電不良発生相以外の二相を通電相として、その上限値の超過分に相当する補完指令Iq*_yを基礎とした電力供給を実行すべく制御信号を出力する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】実回転角に基づく回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することが可能なモータ制御装置を提供すること。
【解決手段】通電不良検出部は、検出対象相である特定相(X相)が通電状態にあるべき相であるにもかかわらず(|Ix*|>I0、ステップ603:YES)、当該特定相の相電流値Ixが非通電状態を示し(|Ix|<I2、ステップ604:YES)、且つ誘起電圧の影響によりモータ電流が極小化する高速回転領域に対応して設定された閾値Cよりも加算角θaが小さいと判定した場合(θa<C、ステップ605:YES)には、特定相であるX相に通電不良の発生を示す異常が生じていると判定する(ステップ606)。
(もっと読む)
同期コンデンサの慣性を制御するためのシステム及び方法
【課題】発電システム内の電力擾乱事象に対応するよう同期コンデンサの慣性を制御するシステムを提供する。
【解決手段】システムは、モータ110と、双方向電源115と、少なくとも1つの制御装置120と、を含むことができる。モータ110は、電力擾乱事象中にコンデンサシャフト122の回転を変更して同期コンデンサ105の所望慣性を得るように構成することができる。双方向電源115をモータ110に結合することができる。少なくとも1つの制御装置120は、電力擾乱事象を識別し、所望の慣性を得るためにモータ110に供給し又はモータ110から受け取る電力量を特定して、特定された電力量に基づいて、電源115からモータ110へ、又はモータ110から電源115への電力供給を制御するよう構成することができる。
(もっと読む)
交流モータの制御装置
【課題】オフセット電流の発生を抑えつつ、より高回転まで矩形波制御が可能な交流モータの制御装置を提供する。
【解決手段】制御装置30は、センサ25の出力に基づいて定まる電気角の1周期内において、各相のスイッチング基準位相に対しての各相の矩形波電圧の電圧位相の変化量をスイッチングごとに等しく増加または減少させる。制御装置30は、電気角の2周期以上の所定周期ごとに矩形波電圧の電圧位相変化の合計量を算出する第1の制御部と、所定周期に一度の割合で合計量に関連する情報を第1の制御部から受取り、各相のスイッチング基準位相に対する位相差を更新する第2の制御部とを含む。第2の制御部は、各相のスイッチング基準位相に対する第n番目のスイッチングの位相差を、合計量を所定周期内のスイッチング回数で除算した単位増減量のn倍に設定する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】定常回転でも安定した回転が得られ、かつ処理時間を低減したブラシレスモータの駆動装置を提供する。
【解決手段】ブラシレスモータの駆動装置10は、回転速度検出部19から供給される回転速度信号に基づいて第1駆動波形PWM信号と第2駆動波形PWM信号の切替の判定をし、いずれの信号を出力するかの指令信号を駆動切替部14に供給する駆動切替判定部20と、を備え、駆動切替判定部20は、回転速度が加速または減速であるときは、第1のしきい値と第2のしきい値は、同一の値とし、回転速度が定常であるときは、第1のしきい値と第2のしきい値は、異なる値とし、回転速度が、第1のしきい値より大きいときは、第2駆動波形PWM信号を出力する判定をし、第2のしきい値より小さいときは、第1駆動波形PWM信号を出力する判定をし駆動切替部14に指令信号を供給する。
(もっと読む)
1 - 20 / 34
[ Back to top ]