
Fターム[5H505JJ17]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | メモリ (852)
Fターム[5H505JJ17]に分類される特許
121 - 140 / 852
モータ制御装置
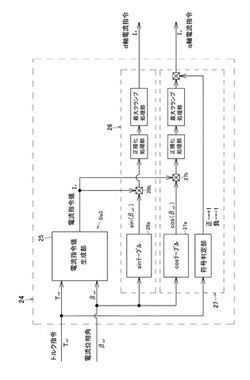
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
モータ制御装置、及び、それを利用したモータの起動方法

【課題】レシプロ式圧縮機のような負荷トルクの変動が大きい圧縮機においても、安定して差圧起動を実現するモータ制御装置及びそれを利用したモータの起動方法を提供する。
【解決手段】d軸電流指令値Id*及びq軸電流指令値Iq*、更には、周波数指令値ω*に基づいてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力することにより電力変換回路を制御し、ベクトル制御を用いたモータ制御装置における起動方法において、d軸検出電流Idc及びq軸検出電流Iqcと、d軸電圧指令値とq軸電圧指令値とから軸誤差Δθcを検出し、位置決め運転モードにより前記d軸電流指令値及びq軸電流指令値を出力し、同期運転モードにより、軸誤差検出手段により検出した軸誤差Δθcに基づいて、負荷トルク変動に適合したd軸電流指令値及びq軸電流指令値を出力し、位置フィードバック運転モードによりd軸電流指令値及びq軸電流指令値を出力する。
(もっと読む)
回転機の制御装置
【課題】ブートストラップ回路を用いたシステムにおいて、モデル予測制御を適用する場合、高電位側のドライブユニットDUの電源となるコンデンサC*(*=u,v,w)の電圧が低下することで、高電位側のスイッチング素子S*pを適切に駆動することができなくなるおそれがあること。
【解決手段】制御装置20は、モデル予測制御によって、インバータINVの8通りの操作状態のうち、制御量とその指令値との差を最小とする操作状態を選択し、これに基づき、インバータINVを操作する。ただし、低電位側のスイッチング素子S*nのオフ状態が所定期間継続すると、強制的にスイッチング素子Sun、Svn,Swnをオン状態とする。
(もっと読む)
回転機の制御装置およびその製造方法
【課題】電動機10の相電流を基本波とすべくインバータINVの出力電圧をフィードフォワード補正したのでは、電動機10のステータの巻線を鎖交する磁束が基本波からずれる場合には、トルク脈動を低減できないこと。
【解決手段】相殺電磁力出力部44は、鎖交磁束の基本波からのずれに起因した電磁力の歪を相殺する相殺電磁力についての、接線方向の相殺電磁力Fnθと、法線方向の相殺電磁力FnRと、軸線方向の相殺電磁力FnTとを各別に出力する。歪補正部36,38,40のそれぞれでは、これら相殺電磁力に応じた電圧を、制御量の制御のための操作量(指令電圧vur,vvr,vwr)に重畳する。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を行なう場合、予測される電流と指令電流との偏差を最小化する操作状態が都度選択されるために、インバータのスイッチング状態の切替頻度が増大するおそれがあること。
【解決手段】ステップS10において電圧ベクトルV(n)を出力した後、ステップS14において、次回の電圧ベクトルV(n+1)を、今回の電圧ベクトルV(n)からのスイッチング状態の切り替え相数が「1」以下のものとして、予測電流ide(n+2),idq(n+2)を算出する。そして、ステップS20において、予測電流ide(n+2),iqe(n+2)と指令電流idr,iqrとの誤差edq(n+2)が閾値eth以下となるものがあると判断される場合、ステップS24において、予測電流ide,iqeの変化速度の絶対値が最も小さいものを選択する。
(もっと読む)
モータ制御装置
【課題】試験体を回転させるモータの回転数の制御の精度を向上させることが可能なモータ制御装置を提供する。
【解決手段】レゾルバ34及びエンコーダ35は、モータ33の回転数を検出する。トルクメータ36は、モータ33のトルクを検出する。フィードバック制御部23は、目標の回転数と目標のトルクとを示すパラメータマップに従って、目標の回転数でモータ33が回転するように、又は、目標のトルクをモータ33が出力するように、レゾルバ34によって検出された回転数、及びトルクメータ36によって検出されたトルクに基づいて、モータ33の動作をフィードバック制御し、トルクの変動幅が閾値以上となる場合、レゾルバ34によって検出された回転数とエンコーダ35によって検出された回転数とから求められる回転数に基づいて、モータ33の動作をフィードバック制御する。
(もっと読む)
駆動装置
【課題】電動機を駆動するためのインバータの制御モードを矩形波制御モードから正弦波制御モードに切り替える際の電動機の出力トルクの変動を抑制する。
【解決手段】駆動電圧系の電圧VHの上昇を伴って矩形波制御モードから正弦波制御モードに切り替えるときには、矩形波制御モードから過変調制御モードに切り替えて(S200)、電流指令Id*,Iq*を保持してインバータを制御すると共に電圧VHが切替目標電圧VHchまで上昇するよう昇圧コンバータを制御し(S210〜S230)、電圧VHが保持されるよう昇圧コンバータを制御すると共に電流指令Id*,Iq*を切替目標電流Idch,Iqchに向けて等トルクライン上を移動させながらインバータを制御し(S240〜S260)、過変調制御モードから正弦波制御モードに切り替える(S270)。
(もっと読む)
回転電機
【課題】始動、アシスト等の駆動時におけるスイッチング素子の発熱は、通電による発熱と電流遮断時に発生するスイッチングオフ時の損失による発熱があり、始動や駆動時では発熱量が大きくなり、スイッチング素子の温度が大幅に上昇してしまう。これを避け、回転電機の過熱保護を図る。
【解決手段】パワー回路用半導体スイッチング素子のアバランシェ降伏を用いてスイッチングオフ時の電圧上昇を緩和するとともに、スイッチングオフ時に前記スイッチング素子に流れている電流が略最小となるように、前記マップ記憶手段425に記憶されているマップから前記各検出手段422、423により検出したB端子電圧、回転速度ごとに演算手段426を用いて界磁電流、位相ずらし量を変更するようにした。
(もっと読む)
モータ制御装置および空気調和機
【課題】風等の外乱によるフリーランでファンモータは発電機となり直流電圧が発生し部品の耐圧を超え故障にいたるという問題があった。
【解決手段】制御器回路やインバータ駆動回路の電源をつくる電圧変換器を平滑キャパシタに接続し、ファンモータのフリーランで平滑キャパシタに発生する直流電圧を直流電圧検出器で検出し、ある値を超えたらインバータ回路の下アームを全相オンさせ、誘起電圧をショートし、平滑キャパシタに発生した直流電圧は電圧変換器を介して制御器回路やインバータ駆動回路で消費させることで直流電圧が部品の耐圧を超えることを防止する。これによりダイナミックブレーキ回路を付加せず、ベクトル制御を用いず、高効率,安価,高信頼性なファンモータの制御装置が実現できる。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
モータ駆動装置
【課題】高速で逆回転しているモータを起動した時でも、モータの電流を許容値以下に抑制してインバータやモータを過電流から保護する。
【解決手段】インバータ20を制御する制御手段と、直流母線41を流れる電流を検出する電流検出器61と、直流母線41に流れる電流の制限値として、第1の電流制限値とこれよりも大きい第2の電流制限値とを保持する電流制限保持部72と、モータ30の起動時に第1の電流制限値を設定し、モータ30の回転速度・回転方向・位置を推定した後に第2の電流制限値を設定する電流制限判断部73と、を備え、制御手段は、モータ30の起動時に、直流母線41の電流が第1の電流制限値を超えないようにインバータ20を制御し、かつ、モータ30を起動した後の通常運転時には、直流母線41の電流が第2の電流制限値を超えないようにインバータ20を制御する。
(もっと読む)
モータ制御装置
【課題】モータトルクの変動を緩慢にすることができ、操舵フィーリングを向上させることができるモータ制御装置を提供する。
【解決手段】速度指令値設定部21は、トルクセンサ1によって検出される操舵トルクThおよび車速センサ2によって検出される車速Vsに応じたモータトルク(アシストトルク)をモータ5から発生させるためのq軸電流指令値に対応したロータ回転速度を、速度指令値ω*として設定する。速度偏差演算部22は、速度指令値設定部21によって設定された速度指令値ω*と、速度演算部34によって演算されたロータ回転速度ωとの偏差(ω*−ω)を演算する。速度制御部23は、速度偏差演算部22によって演算された偏差(ω*−ω)に対して比例積分演算(PI演算)を行なうことによって、q軸電流指令値Iq*を演算する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータ電圧指令値とPI制御部によって演算されたPI演算値とから電圧指令値ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された電圧指令値ゲインまたはdq軸ゲインマップから求めた電流制限ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
電動機駆動装置
【課題】昇圧制御の最中に昇圧回路の異常をより適切に判定する。
【解決手段】昇圧コンバータに昇圧指令がなされているときには(S110)、バッテリ電流IBとリアクトル電流ILとが一致しているか否かを判定し(S120)、昇圧コンバータのキャリア1周期に亘ってバッテリ電流IBとリアクトル電流ILとが一致している状態が継続しているときに(S130)、昇圧コンバータに異常が生じていると判定する(S140)。これにより、昇圧コンバータを制御している最中にも昇圧コンバータの異常を判定することができる。
(もっと読む)
空気調和機
【課題】電力量を正確に測定することができる空気調和機を提供すること。
【解決手段】本発明の空気調和機は、交流電源から直流電源に変換する整流回路と、モータ負荷を駆動するインバータと、チョッピング素子と昇圧用整流回路からなる昇圧回路と、交流電流の電流値を測定する電流センサと、昇圧回路のチョッピング素子の半周期に対するチョッピング回数をカウントするチョッピング回数検出手段と、電流センサで検出する電流値とチョッピング回数から力率を選択し出力する回数別力率テーブル記憶手段とを備え、回数別力率テーブル記憶手段から出力される力率を用いて電力量を算出する。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】その目的は、モータ回転角速度を判定条件に加えることなく、精度良く通電不良を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】通電不良検出部71は、相電流値が所定電流値以下であり、且つ電源電圧Vpsが所定電圧値以上である場合に、連続してDUTY指令値が所定電流値に対応する所定範囲の上限値以上であるという第1の判定条件、及び連続してDUTY指令値が下限値以下であるという第2の判定条件を満たすか否かを判定する。そして、通電不良検出部71は、第1の判定条件を満たす状態が継続する時間である第1の継続時間と、第2の判定条件を満たす状態が継続する時間である第2の継続時間とをそれぞれ計測し、第1又は第2の継続時間が、高速回転時におけるモータ21の回転周期に基づく判定時間を超えた場合に、通電不良が発生したと判定するようにした。
(もっと読む)
制御装置
【課題】簡易な構成で機械式ブレーキの作動遅れ時間を自動的に設定できる制御装置を得ること。
【解決手段】制御装置は、モータと前記モータの動作を制限する機械式ブレーキとを制御する制御装置であって、前記モータを駆動するモータ駆動部と、前記機械式ブレーキを作動させるブレーキ駆動部と、前記モータ駆動部により前記モータが駆動される際の電流を検出する検出部と、前記検出された電流からトルク分電流を抽出する抽出部と、前記抽出されたトルク分電流の時間的な変化に応じて、前記機械式ブレーキの作動要求を前記ブレーキ駆動部に対して行ってから前記機械式ブレーキが実際に作動するまでの作動遅れ時間を推定して設定する設定部と、前記設定された作動遅れ時間に応じて、前記ブレーキ駆動部による前記機械式ブレーキの作動を制御するとともに、前記モータ駆動部による前記モータの動作速度を制御する制御部とを備えている。
(もっと読む)
アクチュエータ、モータ制御システム及びモータ制御方法
【課題】センサ総数を低減し、信頼性を向上したアクチュエータ、モータ制御システム及びモータ制御方法を提供する。
【解決手段】アクチュエータは、アクチュエータは、モータと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の位置を規制する位置規制機構と、被駆動機構の変位を検出する位置センサと、位置規制機構により被駆動機構の位置が規制された状態での位置センサの出力変動を温度情報へ変換する制御装置と、を含む。
(もっと読む)
可変速駆動装置および給水装置
【課題】インバータ周波数から目標電流を求める演算式を、パラメータを用いて自動生成し、演算式を無数に生成できるようにして多数の機種に適用出来る可変速駆動装置および給水装置を提供する。
【解決手段】インバータ周波数から目標電流を求め、運転電流が目標電流となるよう周波数を制御して間接的に吐出圧力を所定の目標値に制御する方式において、インバータ周波数から目標電流を求める演算式をパラメータを用いて自動生成し、演算式を無数に生成できるようにして多数の機種に適用するとともに、目標電流を更新するタイミングを特定してこれの演算式を正しく生成し、目標電流に不感帯を設けて安定化したことを特徴とする。
(もっと読む)
モータ駆動制御装置とモータ駆動方法
【課題】三相モータを高速且つ高トルクで駆動可能とする。
【解決手段】三相モータ30の各相の電流から、マグネットトルク電流iqrとリラクタンストルク電流idrとを求めてフィードバック制御を行う。この際、回転角センサ109の測定した回転角θに、制御システムの遅れに相当する回転角を所定の角度deg分加算することにより、遅れ補償制御を行い、モータの応答性を高める。さらに、弱め磁束制御を行って、モータの応答性を高める。制御系の遅れは、無駄時間と一次遅れ系の時定数とで近似する。
(もっと読む)
121 - 140 / 852
[ Back to top ]