
Fターム[5H505JJ17]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | メモリ (852)
Fターム[5H505JJ17]に分類される特許
101 - 120 / 852
駆動装置
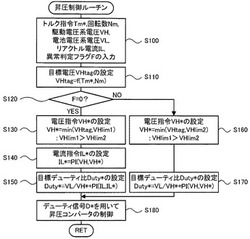
【課題】昇圧コンバータのリアクトルの電流を検出する電流センサに異常が生じているときに、より適正に対処する。
【解決手段】リアクトルの電流を検出する電流センサに異常が生じているときには(S120)、電流センサに異常が生じていないときの許容上限電圧VHlim1より低い許容上限電圧VHlim2で駆動電圧系の目標電圧VHtagを制限して駆動電圧系の電圧指令VH*を設定し(S160)、電圧センサからの電圧(駆動電圧系の電圧)VHと電圧指令VH*とを用いたフィードバック制御によって目標デューティ比Duty*を設定し(S170)、設定した目標デューティ比Duty*を用いて昇圧コンバータを制御する(S180)。
(もっと読む)
埋込型永久磁石同期電動機の駆動装置

【課題】埋込型永久磁石同期電動機(IPMSM)の駆動装置が開示される。
【解決手段】埋込型永久磁石同期電動機(IPMSM)の回転子の位置及び速度を測定する検出部を含むシステムにおいて、弱磁束制御の第1領域の第1電流指令を受信して、IPMSMを駆動するための本発明の装置は、過変調された電圧情報を修正部に伝達する帰還部と、回転子速度と過変調された電圧情報を用いて、第1電流指令を弱磁束制御の第2領域の第2電流指令に修正する修正部と、第2電流指令を制御して、電圧を出力する制御部と、制御部の出力をインバータ部が合成可能な最大電圧に制限する第1制限部と、第1制限部の出力から、指令トルクに追従するための3相の電圧指令をIPMSMに印加するインバータ部と、を含む。
(もっと読む)
昇圧コンバータの制御装置
【課題】駆動電圧系の電圧の目標電圧への追従性を向上させる。
【解決手段】昇圧コンバータのデューティ指令値Dutyは、電池電圧系電力ラインの電圧VLから昇圧されている駆動電圧系電力ラインの電圧VHとバッテリの充放電電力とが変動していない所定の定常状態のときには前回Dutyから前回Dffを減じることにより更新されると共に所定の定常状態でないときには更新されずに保持される力行時推定項Dadj1または回生時推定項Dadj2と(S150,S160,S260,S270)フィードフォワード項Dffとフィードバック項Dffとの和として設定される(S220,S330)。即ち、所定の定常状態でない状態になったときでも、フィードバック項Dfbとは別に、装置の個体差に応じた値として所定の定常状態のときに更新される力行時推定項Dadj1または回生時推定項Dadj2を一部に加えてデューティ指令値Dutyが設定される。
(もっと読む)
電動機駆動装置
【課題】リアクトル電流を検出してコンバータの制御に用いるものにおいて、リアクトル電流を精度をより向上させる。
【解決手段】昇圧コンバータが動作中で且つオフセット学習が完了しているときには(S100,S110)、バッテリの充放電電流IbからリアクトルLの電流ILを減じた電流差を補正量ΔILに設定し(S130)、リアクトルLの電流ILとオフセット学習量IL0と補正量ΔILとの和を昇圧コンバータ55の制御に用いるリアクトル電流ILとして設定する(S140)。これにより、リアクトル電流ILの精度をより向上させることができ、ひいては昇圧コンバータ55の制御性をより向上させることができる。
(もっと読む)
誘導電動機の制御装置及び誘導電動機の制御方法
【課題】誘導電動機の制御において、装置の耐久性を損なうことなく、通常よりも高いトルクでの制御を行うこと。
【解決手段】回転速度がBASE速度に達するまでの間はトルクが一定となる定トルク制御を行うと共に、BASE速度からTOP速度までの間は誘導電動機の出力が一定となる定出力制御を行い、通常の制御においては、BASE速度において励磁回路の電圧が最大となり、定出力制御において最大の励磁回路の電圧が維持されるように端子電圧が回転速度の増加に伴って高くなり、TOP速度において最大の端子電圧を印加するように制御し、一時的に高トルクを得るための高トルク制御においては、BASE速度において端子電圧が最大となり、定出力制御において最大の端子電圧が維持されるように励磁回路の電圧が回転速度の増加に伴って低くなり、励磁電流が通常の制御よりも高くなるように制御することを特徴とする。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
誘導電動機の制御装置及び誘導電動機の制御方法
【課題】誘導電動機の制御において、装置の耐久性を損なうことなく、通常よりも高いトルクでの制御を行うこと。
【解決手段】誘導電動機の制御装置であって、誘導電動機の動作条件に応じて必要とされるトルクの値を時系列に求め、誘導電動機の回転速度に応じたトルクが予め定められたトルク制御パターンと比較して必要とされるトルクが満たされているか否か確認し、BASE速度以下の速度領域において必要とされるトルクが満たされていない場合、定トルク制御における励磁電流の最大値が高くなるようにトルク制御パターンを変更し、BASE速度以上の速度領域において必要とされるトルクが満たされていない場合、BASE速度を通常よりも高くするように変更するトルク特性設定装置21と、変更されたトルク制御パターンに応じて磁界制御パターンを変更する磁束指令変更装置140とを含むことを特徴とする。
(もっと読む)
電動機の制御方法
【課題】低負荷時の効率を従来よりも向上できる電動機の制御方法を提供する。
【解決手段】要求動作点Dとなる可変の要求回転数n1および要求トルクTn1に基づき、実際の出力動作点である出力回転数および出力トルクを要求動作点に一致させるように電気入力を制御する電動機の制御方法であって、所定の単位時間tAを通して、要求回転数n1に出力回転数を継続的に一致させるとともに、要求回転数n1の条件下で要求トルクTn1を継続的に出力することによって得られる効率よりも高い効率が得られるトルク値でありかつ要求トルクTn1よりも大きい高効率トルク値(最高効率トルク値Tn1e−max)を含んで電動機が実際に出力する瞬時トルクT(t)を変遷させ、瞬時トルクT(t)の単位時間tAを通した時間平均値で求められる出力トルクが要求トルクTn1に一致するように電気入力を制御する。
(もっと読む)
誘導モータ制御装置及び制御方法
【課題】車両の走行用動力源として搭載された誘導モータの駆動制御で用いられるモータ定数を簡易且つ精度よく求めることにより、誘導モータの制御精度を向上可能な誘導モータ制御装置及び制御方法を提供する。
【解決手段】誘導モータ1の制御装置は、拘束状態で第1のパラメータ群を算出する第1のパラメータ群算出部8と、無負荷状態で第2のパラメータ群を算出する第2のパラメータ群算出部9と、前記算出した第1及び第2のパラメータ群を誘導モータの回転数N及び出力トルクと対応付けてマップとして記憶する記憶部10と、第1及び第2のパラメータ群を前記マップから取得して電流指令値を算出する電流指令値算出部8,9とを備えたことを特徴とする。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
車両
【課題】コンバータおよびインバータを含むモータ駆動回路を備えた車両において、駆動回路の共振に起因する直流電源の過熱を適切に抑制する。
【解決手段】コンバータおよびインバータを含むモータ駆動回路を制御する制御装置は、コンバータの上アームオン制御中(非昇圧中)である場合(S10にてYES)で、かつモータ回転速度Nが共振回転速度領域に含まれる場合(S11にてYES)、車載の電流センサによる電流Ibの計測値の2乗値を予めオフラインで検出した電流Ibの真値の2乗値に換算し(S12)、電流Ibの真値の2乗値が許容値以上である場合(S13にてYES)、矩形制御の実行を禁止する(S14)。
(もっと読む)
電力変換器制御装置
【課題】多重巻線型電動機に接続した複数の電力変換器を制御する電力変換器制御装置において、電力変換器で発生するスイッチング損失を抑え、かつ電力変換器で発生する複数の低次の高調波成分を低減する。
【解決手段】電力変換器制御装置1は、多重巻線型電動機4の回転子の磁極位置を検出する位置検出器22と、電動機4の巻線群に対応した電圧指令を発生する電圧指令部11、17と、電圧指令から変調率を演算する変調率演算部13、19と、磁極位置信号から電動機4の回転速度を演算する速度演算部14と、変調率と電動機4の回転速度とに基づき、電力変換器2、3のスイッチング素子のスイッチングのパルスパターンを演算するパルスパターン演算部15、20と、電圧指令とパルスパターンと磁極位置信号に基づき、電力変換器2、3を駆動するゲートパルス出力部16、21とから構成される。
(もっと読む)
電動弁駆動システム
【課題】無駄なエネルギー消費を抑制し、簡単な構成で電動弁を駆動することができる電動ボール弁駆動システムを提供する。
【解決手段】電動ボール弁駆動システム10は、目標開度Ndを設定する目標開度設定部11と、目標開度Ndとボール弁32の現在開度Naとを入力して両者間の開度差分ΔNを求める加算部13と、開度差分ΔNに基づいて単相誘導電動機31を駆動する駆動パルス幅を演算するパルス幅演算部14、ボール弁32のヒステリシス相当駆動時間を求めて駆動パルス幅を補正するヒステリシス補正部16と、求めた駆動パルス幅を有する駆動パルスをSSR20に出力する駆動パルス出力部19と、駆動パルスを単相誘導電動機31に出力し、単相誘導電動機31を駆動するSSR20と、を備える。
(もっと読む)
モータ制御装置
【課題】電源電流指令値に基づいてブラシレスモータを電流制御で駆動する場合に、外乱に対するロバスト性を向上させることができるモータ制御装置を提供する。
【解決手段】q軸電流指令値演算手段21,22は、ロータが電気角で360°回転する毎に、電源電流検出値IPと電源電流指令値IP*との偏差に基づいてq軸電流指令値Iq*を演算する。そして、電圧指令値演算手段23,24,26,27は、所定の演算周期Ts毎に、q軸電流指令値演算手段21,22によって決定されたq軸電流指令値Iq*とq軸電流検出値Iqとの偏差および所定のd軸電流指令値Id*とq軸電流検出値Idとの偏差に基づいて、q軸電圧指令値Vq*およびd軸電圧指令値Vd*とを演算する。この電圧指令値Vq*,Vd*に基づいてモータ1が駆動される。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
回転機の制御装置
【課題】トルク式「φ・id+P(Ld−Lq)・id・iq」や、電機子鎖交磁束定数φとして特定の値を想定したマップに基づきトルクを推定すると、モータジェネレータの永久磁石の磁力が減少する異常が生じる場合等にあっては、電機子鎖交磁束定数φが変化するため、トルクの推定精度が大きく低下する。
【解決手段】診断用トルク推定部56では、実効電力EP(=Vn・Ia・cosΔ)を電気角速度ωで除算することで診断用推定トルクTdeを算出する。ここで、ノルムVnは、インバータの出力電圧のベクトルのノルムであり、ノルムIaは、実電流id,iqのベクトルノルムであり、位相差Δは、電流ベクトルと電圧ベクトルとの位相差である。FB演算系異常診断部60では、上記式に準じた手法にて推定される制御用推定トルクTeと診断用推定トルクTdeとを比較することで、演算系の異常の有無を診断する。
(もっと読む)
回転機の制御装置
【課題】トルク式「φ・id+P(Ld−Lq)・id・iq」や、電機子鎖交磁束定数φとして特定の値を想定したマップに基づきトルクを推定すると、モータジェネレータ10の永久磁石の磁力が減少する異常が生じる場合等にあっては、電機子鎖交磁束定数φが変化するため、トルクの推定精度が大きく低下する。
【解決手段】MGECU30では、実効電力EP(=Vn・Ia・cosΔ)を電気角速度ωで除算することで診断用推定トルクTdeを算出する。ここで、ノルムVnは、インバータINVの出力電圧のベクトルのノルムであり、ノルムIaは、実電流id,iqのベクトルノルムであり、位相差Δは、電流ベクトルと電圧ベクトルとの位相差である。診断用推定トルクTdeがトルク指令値Trから大きく乖離するか否かに基づき、トルクの異常の有無を診断する。
(もっと読む)
電動機駆動システム
【課題】ダイオードコンバータを採用した際に、圧延機の噛み込み時に電動機に急激な負荷が加わる際の電動機一次電圧の飽和を避けることができるとともに、電圧飽和の影響によるインバータの制御不安定又はトリップを防ぐ。
【解決手段】電動機11と、インバータの直流電源であるダイオードコンバータ22と、インバータを用いて電動機11を可変速制御し、且つ界磁弱め制御を行う電動機制御装置23と、電動機制御装置23により出力される一次電圧を検出する一次電圧検出部13と、要求されるインバータの変調率の変動が予測される場合に、変動のタイミングと変動量とを検出する変調率変動検出部と、変調率変動検出部により検出された変調率の変動量に基づいて一次電圧の変動量を算出する補正電圧部25とを備え、電動機制御装置23は、変動のタイミングに合わせ、一次電圧とその変動量とに基づいて界磁弱め制御を行う際のd軸界磁電流抑制分を算出する。
(もっと読む)
モータ制御装置
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
モータ制御装置、及び、それを利用したモータの起動方法
【課題】レシプロ式圧縮機のような負荷トルクの変動が大きい圧縮機においても、安定して差圧起動を実現するモータ制御装置及びそれを利用したモータの起動方法を提供する。
【解決手段】d軸電流指令値Id*及びq軸電流指令値Iq*、更には、周波数指令値ω*に基づいてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力することにより電力変換回路を制御し、ベクトル制御を用いたモータ制御装置における起動方法において、d軸検出電流Idc及びq軸検出電流Iqcと、d軸電圧指令値とq軸電圧指令値とから軸誤差Δθcを検出し、位置決め運転モードにより前記d軸電流指令値及びq軸電流指令値を出力し、同期運転モードにより、軸誤差検出手段により検出した軸誤差Δθcに基づいて、負荷トルク変動に適合したd軸電流指令値及びq軸電流指令値を出力し、位置フィードバック運転モードによりd軸電流指令値及びq軸電流指令値を出力する。
(もっと読む)
101 - 120 / 852
[ Back to top ]