
Fターム[5H505JJ17]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | メモリ (852)
Fターム[5H505JJ17]に分類される特許
21 - 40 / 852
制御方法及び制御装置
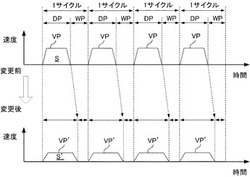
【課題】装置の大型化やコストアップを抑制しつつ、回生抵抗によって消費される回生電力を低減すること。
【解決手段】モータからの回生電力の少なくとも一部を熱エネルギとして消費する回生抵抗を備えた回生回路に接続されたモータの制御方法において、前記モータを所定の速度制御パターンで駆動する駆動工程と、該駆動工程後に前記モータを停止する待機工程と、を反復する反復工程と、前記駆動工程中、前記回生抵抗への通電状況を、監視回路にて監視する監視工程と、前記監視工程の監視結果に応じて、前記回生電力の発生が低減するように前記速度制御パターンを変更し、かつ、前記速度制御パターンの変更に伴い、前記駆動工程の実行時間を長くすると共に、前記待機工程における待機時間を短くする変更工程と、を備えたことを特徴とする。
(もっと読む)
車両駆動用誘導電動機の制御装置

【課題】トルク推定の精度を向上させることができる、車両駆動用誘導電動機の制御装置。
【解決手段】上位コントローラ110から入力されるトルク指令Tmrefおよび二次磁束指令φ2refに基づいて、車両駆動用誘導電動機108を高周波駆動するインバータ107に制御信号を出力するモータコントローラ109は、インバータ107の駆動周波数ω1を設定する一次周波数演算部219と、誘導電動機108の三相電流値を検出するモータ電流値検出部209と、検出された三相電流値をd軸電流値Idおよびq軸電流値Iqに変換する座標変換部223と、誘導電動機108の出力トルクを推定するトルク推定部211と、を備え、トルク推定部211は、モータ電流値検出部209による電流検出からトルク推定までの電流位相変化を補正する位相補償量と、d軸電流値およびq軸電流値とに基づいて、出力トルクTmを推定する。
(もっと読む)
自動車
【課題】モータに過電圧が作用したり過電流が流れたりするのを抑制する。
【解決手段】駆動輪の回転数の減少時に、モータを駆動するインバータの制御方式を矩形波制御方式から過変調制御方式に切り替える矩形波過変調切替条件が成立したときにおいて(S530,S540)、駆動輪の回転数減少率ΔNwが所定値Nref以下のときには過変調制御方式に切り替え(S600)、駆動輪の回転数減少率ΔNwが所定値Nrefより大きいときには過変調制御方式を経由せずに正弦波制御方式に直接切り替える(S610)。
(もっと読む)
電動機の駆動方法および駆動装置
【課題】電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供する。
【解決手段】第1時刻から所定時間経過した第2時刻において目標回転速度ω*となるように電動機を駆動させる電動機の駆動方法であって、目標回転速度ω*を設定する目標設定ステップ(S1)と、電動機の入出力特性から得られたマップにおいて、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道L1を決定する初期軌道決定ステップ(S2、S3)と、初期軌道L1を構成する全動作点における損失の和が最小(または効率の和が最大)となるように、マップに基づいて最適化を行って目標軌道L2を導出する目標軌道導出ステップ(S4〜S7)と、目標軌道L2に従ってトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
(もっと読む)
二輪車両用制御装置
【課題】ユーザが二輪車両を使用する場合の利便性を高めることのできる二輪車両用制御装置を提供する。
【解決手段】切替スイッチ58を始動発電機36の中性点N側に接続状態としてかつ、インバータIVの各スイッチング素子Sjp(j=u,v,w)、Sjn(j=u,v,w)を操作することで昇圧チョッパ回路を形成し、バッテリ56に対しコンデンサ54の電圧を昇圧する。そして、コンデンサ54の昇圧された電圧を始動発電機36に印加して始動発電機36を回転駆動させることで、始動発電機36からクランク軸30に回転エネルギを付与する中性点駆動処理を行う。そして、中性点駆動処理が実行される場合、その旨をユーザに報知する処理を行う。
(もっと読む)
モータ駆動回路
【課題】駆動コイルにブレーキ電流が流れたとき、回生電流が電源に向かって供給されることによる電源電圧の上昇を抑え、電源の損傷やIC等の耐圧破壊を防止する。
【解決手段】第1シンク側トランジスタ14から第2ソース側トランジスタ11の方向へ、又は、第2シンク側トランジスタ13から第1ソース側トランジスタ12の方向へ流れる逆方向電流を検出する検出回路と、検出回路が逆方向電流の検出を開始してから所定期間、検出回路の検出出力を無効にする無効回路と、検出回路が逆方向電流の検出を開始してから所定期間が経過した場合、検出回路の検出出力に従って同期整流を禁止する第1禁止回路と、第1又は第2シンク側トランジスタをオンするPWM信号の各オンデューティ期間が所定期間よりも短い場合、第1禁止回路の動作に関わらず、同期整流を禁止する第2禁止回路とを備える。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
電力変換装置
【課題】還流ダイオードに流れる電流の振動によって発生するノイズを抑制する電力変換装置を提供する。
【解決手段】複数のスイッチング素子Q1〜Q6と還流ダイオードD1〜D6とを有し、前記複数のスイッチング素子Q1〜Q6のオン及びオフを切り換えることで、入力された電力を変換し、負荷に出力する電力変換回路と、前記複数のスイッチング素子Q1〜Q6を駆動する駆動回路20と、前記電力変換回路及び前記駆動回路20を制御する制御手段とを備え、前記制御手段は、前記電力変換回路から前記負荷に供給される供給電流が0アンペア付近にある場合に、前記スイッチング素子Q1〜Q6をターンオンさせる際のスイッチング速度を、前記供給電流が0アンペア付近ではない場合のスイッチング速度より低下させる。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
排熱回収装置
【課題】タービンで発電した電力でコンプレッサを駆動して排熱回収することができ、コンプレッサの制御が容易であり、かつ排熱を回収するために複数のタービンを必要とする場合への適用が容易である排熱回収装置を提供する。
【解決手段】直流バス5の直流電圧を検出する電圧検出器12と、直流電圧に基づいて算出されたコンプレッサ8A,8Bの回転速度指令値16A,16Bをインバータ6A,6Bに出力する回転速度指令器13とを備える。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
回転機の制御装置及び回転角算出装置
【課題】R/Dコンバータ36bによって算出される回転角に含まれる遅れ誤差がモータジェネレータの制御に及ぼす影響を抑制することのできる回転機の制御装置を提供する。
【解決手段】遅れ補正量設定部B14において、モータジェネレータの回転子の回転速度ωが高いほど、回転角の進角側への補正量である遅れ補正量Cδを大きく設定する処理を行う。そして、加算部B15において、設定された遅れ補正量Cδによって上記回転角を補正する処理を行う。さらに、誤差補正部B16によって、回転角に含まれる変動誤差を除去する処理を行う。これら処理は、R/Dコンバータ36b内にて行われる。
(もっと読む)
モータ制御装置およびトルク値取得方法
【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
建設機械の電動駆動制御装置
【課題】共通のインバータ装置を搭載した多品種の作業機械からなる建設機械において、搭載された電動モータがロック状態と回転状態を繰り返す運転を行う場合であっても、電動機器の熱破壊からの保護が行える建設機械の電動駆動制御装置を提供する。
【解決手段】建設機械の被駆動体を駆動する電動モータ4と、前記電動モータを制御するインバータ装置12と、前記電動モータの速度指令を入力する操作装置13と、前記操作装置からの速度指令に応じて前記インバータ装置にトルク指令を出力する制御手段10とを備えた建設機械の電動駆動制御装置において、前記電動モータの速度信号を検出する速度検出器14と、前記速度検出器からの速度信号が予め設定された速度より小さい領域において、前記電動モータ4のトルクを制限するトルク指令を前記インバータ装置12に出力する制御手段10とを備えた。
(もっと読む)
ブラシレスモータ用制御装置およびそれを備えた洗濯機
【課題】簡単、安価な構成および簡単な演算での回転位置センサの取付誤差を補正して、振動、騒音を低減できるブラシレスモータ用制御装置およびそれを備えた洗濯機を提供する。
【解決手段】ブラシレスモータ用制御装置5は、ホールセンサ55u,55v,55wの出力に基づいて、複数のホールセンサ55u,55v,55wの複数の間隔データを得ると共に、複数の間隔データの平均値を求める誤差検出部80とを備える。上記複数の間隔データおよび平均値はセンサ誤差メモリ部65に記憶される。センサ誤差補正部66は、上記間隔データおよび平均値に基づいて、ホールセンサ55u,55v,55wの間隔のズレを補正する。これにより、角速度推定部67は、ホールセンサ55u,55v,55wの間隔のズレを補正した結果を示す信号に基づいて、ブラシレスモータ4のロータの回転速度を正確に求めることができる。
(もっと読む)
同期機制御装置
【課題】同期機や電力変換手段等の状態に応じて、適切な運転目標指令を生成し、運転目標を満足する制御指令を生成する。
【解決手段】トルク指令と回転速度と運転目標指令とに基づいて、電機子鎖交磁束指令とトルク電流指令を生成する制御指令生成器10を、トルク指令またはトルク電流指令に基づき第1の磁束指令を生成する第1の磁束指令生成器21と、トルク指令またはトルク電流指令と同期機1の回転速度とに基づき第2の磁束指令を生成する第2の磁束指令生成器22と、運転目標指令に基づき第1および第2の磁束指令の2つの磁束指令の配分比に相当する配分係数を設定する指令配分設定器23と、2つの磁束指令と配分係数に基づき電機子鎖交磁束指令を出力する磁束指令調整器24と、トルク指令と電機子鎖交磁束指令とに基づきトルク電流指令を生成するトルク電流指令生成器25により構成する。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びに電動パワーステアリング装置
【課題】CPUに大きな演算負荷を掛けることなく、IPMモータのトルクリプルを低減可能なモータ制御方法・装置を提供する。
【解決手段】IPM型ブラシレスモータ3の制御装置50は、最大トルク制御による巻線電流値を示す基本波電流を算出する基本電流算出部52と、電流センサ64にて検出した相電流値に基づいて、マグネットトルクによるトルクリップルを相殺する第1高調波成分Bsin6(θ+β)と、リラクタンストルクによるトルクリップルを相殺する第2高調波成分Asin6(θ+α)とを算出する補正成分算出部59と、相電流と第1及び第2高調波成分のパラメータA,B,α,βとの関係が格納された補正マップ58と、第1及び第2高調波成分を基本波電流に重畳して供給電流を補正し電流指令値Id’,Iq’を作成する電流補正部60と、を有する。
(もっと読む)
モータ制御装置
【課題】起動時間の短縮化が図れるモータ制御装置を提供する。
【解決手段】マイクロコンピュータ11は、速度比率指令値演算部21と、第1スイッチ22と、速度比率偏差演算部23と、速度制御部24と、電流比率指令値演算部25と、第2スイッチ26と、電流比率偏差演算部27と、q軸電流制御部28と、起動制御部43とを含んでいる。速度比率指令値演算部21は、予め設定されたロータの回転速度の最大値に対する速度指令値ω*の比率を、速度比率指令値として演算する。起動時には、第1スイッチ22は、速度比率指令値を第2スイッチ26に入力させ、第2スイッチ26は、第1スイッチ22から入力する速度比率指令値を、q軸電流比率指令値として電流比率偏差演算部27に入力させる。
(もっと読む)
21 - 40 / 852
[ Back to top ]